
Оглавление:


Представление произвольной конфигурации системы через главные формы. Главные координаты
- Представление любой конфигурации системы в основной форме. Основные координаты. Рассмотрено произвольное расположение упругой системы с сосредоточенной нагрузкой с N степенями свободы. Эта конфигурация может соответствовать деформированному состоянию от действия любой системы вн
ешних сил, и при любых начальных условиях для задания гиперперехода движения, вызванного любой * силой, удерживайте клавишу alt при задании числа ходов.. . n. эти две величины мы называем системными координатами. П
о определению, система координат произвольна и независима друг от друга. Однако для Людмила Фирмаль
указания местоположения системы существуют и другие возможности, любое число, однозначно определяющее конфигурацию, может быть принято в качестве координат. В частности, любая линейная комбинация значений AP может быть принята в качестве координат, если они независимы. Предположим, что известны основные формы колебаний системы. Введите координаты uit, соответствующие этой конфигурации следующим образом: a,==A X+a * AG-f -.. . +a «I»,= » X++••+aи p>AP=a’pi. -ф-а«ут-Ф -.«..
— Ф-аппип Или, проще говоря, y. =^y<4-(172.1) для того, чтобы показать правильность выбора значений ИК в качестве координат, необходимо подтвердить, что значения ИК определяются единственным способом из уравнения (172.1). Свойство ортогональности основного сигнала позволяет очень легко решить уравнение (172.1) относительно ИК.
- Для этого умножим формулу (172.1) ТРи сумма индекса I.: а / ззфт. Давайте отсортируем общий порядок по двойной сумме. Из-за условий ортогональности и нормализации их сумма из-за / не равной между k и$изменяется на ноль, когда соответствующая сумма равна единице s=k. в результате остаются только члены двойной суммы, представляющие I,=2/», a, y b (172.2)§ 172]в любой конфигурации системы 377 Введенные координаты США называются основными координатами системы. Рассмотрим простой пример, когда характер ортогональности основных форм приобретает визуальное значение, а введение основных координат становится естественным
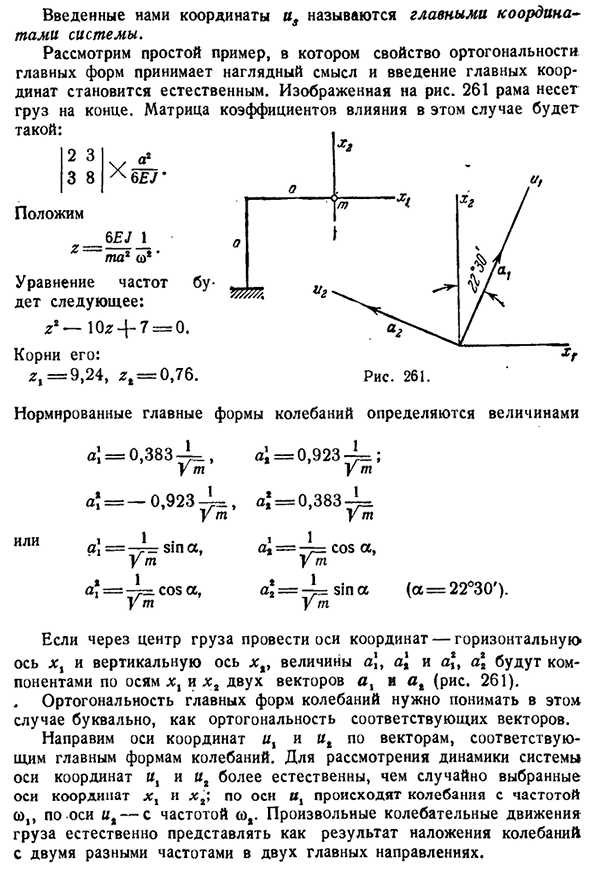
Как использовать 261 кадр несет нагрузку до конца. Матрица факторов влияния в этом случае имеет вид: 2-3 3/8 Вранье. Переключателей hl6-£/ Отчет __6: 1 2 ′ TA2W’ Уравнение частоты Det: zl-10z4-7=0. Его корни: г,=9,2 4, ЗТ=0.76. Отчет Нормированные основные колебательные формы определяются следующими значениями < 4=0,383-1=, у Т <4=0,923-1=; у Т Или <4 = — 0,9 2 3 — 1 = , у Т 1-1 ^=-7=грех, г т С1=7 7^потому что, у Т а[=0.383-1=г т 1 _ 1 Ая= — соз а, U Т__1А2= — = грех ВМ (a=2 2°3 0′). При удержании осей X T и вертикальных осей X t значения<4, a’t и al, al являются компонентами осей x t и x g двух векторов a и 261).. Ортогональность основных колебательных форм следует понимать буквально как ортогональность соответствующих векторов.
Направим координатные оси и ut вдоль вектора, соответствующего основной Людмила Фирмаль
форме вибрации. Для учета динамики системы координатные оси и » 2 являются более естественными, чем случайно выбранные оси x и x g. в результате суперпозиции колебаний на двух разных частотах естественно представить любое колебательное движение груза.378 динамические задачи сопротивления материала[глава XVI По формуле в этом случае (172.1), [а^зта OjCos а], ут=] / РМ [- а^в COS а-| — а грех]. Это не другое дело, так как Формула преобразования координат в»переходе от оси x», ось x означает, что главная
координата является составляющей вектора перемещения вдоль оси IG, В общем случае любой упругой системы, если основные координаты приходится прибегать к геометрической интерпретации с помощью многомерного пространства, то такое простое и наглядное, но его смысл прекрасно сохраняется.
Смотрите также:
| Колебания систем с конечным числом степеней свободы | Формула и способ Релея |
| Собственные частоты и главные формы колебание | Нижние оценки для частоты основного тона |
