
Оглавление:



Формула Эйлера для определения критической силы сжатого стержня
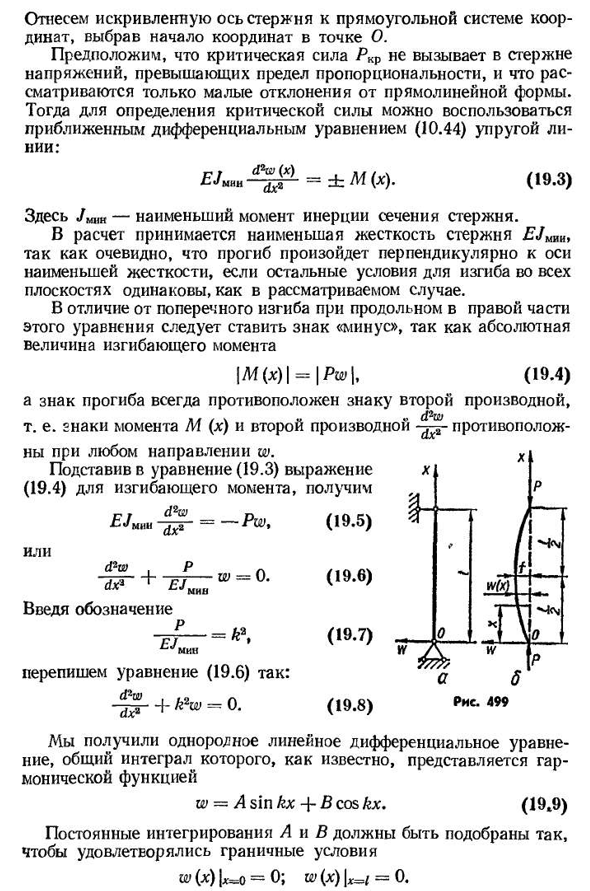
- Уравнения Эйлера для определения критической силы сжатого стержня Под действием силы P предполагается, что ее величина несколько превышает критическую силу RCR. 499, а) слегка согнуты(рис. 499, б). Выбрав начало координат в S02, криволинейная ось стержня будет отнесена к декартовой системе координат.
Предполагается, что критическая сила RCR не вызывает напряжения стержня, превышающего предел пропорциональности, и учитывается лишь незначительное отклонение от прямой формы. Затем критическая сила может быть определена с помощью приближенного дифференциального уравнения упругой линии(10.44: С F tPti) (%) ’^2… — я Л4 (х). Здесь в/ » —
наименьший момент инерции поперечного сечения стержня. Если другие условия для изгиба со всех Людмила Фирмаль
сторон одинаковы, то ясно, что прогиб происходит перпендикулярно оси наименьшей жесткости, как бы принимая во внимание. В отличие от вертикального и поперечного изгиба в правой части этого выражения абсолютное значение изгибающего момента, поэтому знак минус следует ставить /M (x)/=| Rsh/, (19.4) и знак отклонения всегда противоположен знаку второй производной, то есть знак момента M (x) и вторая производная противоположны
в любом направлении w. Подставляя формулу (19.3)для изгибающего момента (19.4), получаем£ / MII — ^ = — P^, (19.5) Или d2w п п п W+и.. . — (19.6) Введите п__г. № 2F3J* * (19.7) «Мой Переписывание формулы следующим образом(19.6): С ’ +^ — о. (19.8) Получены однородные линейные дифференциальные уравнения, в которых общие интегралы известны как гармонические функции. ш-потому что грех кх кх+. (19.9)Интеграл A и B константы должен быть выбран таким
- образом, чтобы было выполнено граничное условие. Из первого граничного условия B будет равно 0, т. е. w (x)=sin kx. (19.10) из второго условия получаем L sin L/=0. (19.11) предполагая, что A равно 0, отклонение равно нулю. Ш(х)=0. Решение соответствует одной из возможных равновесных форм сжатого стержня, то есть прямой форме. Нас интересует величина силы P, благодаря которой становится возможной другая форма кривой равновесия. Так как a#=0, то уравнение sin kl-0 должно удовлетворять искривленной форме стержня. Корни этого уравнения kl могут иметь бесконечное
множество значений: 0, l, 2l,…, PL, т. е. kl~PL, где n-произвольное целое число. Однако первый маршрут kl-0 удаляется, поскольку он не соответствует исходным данным, о которых идет речь. Итак, L2 / 2=p2l2. (19.12) тогда из уравнения (19.7) получаем формулу сжимающей силы: P= ——-(19.13) Формула(19.13) является первой формулой, полученной Эйлером. На практике отмечается минимальное значение силы продольного сжатия, которое обеспечивает возможность продольного изгиба.
Минимальная критическая нагрузка RCR определяется n=1 и kl-l: (19.14) Вернемся Людмила Фирмаль
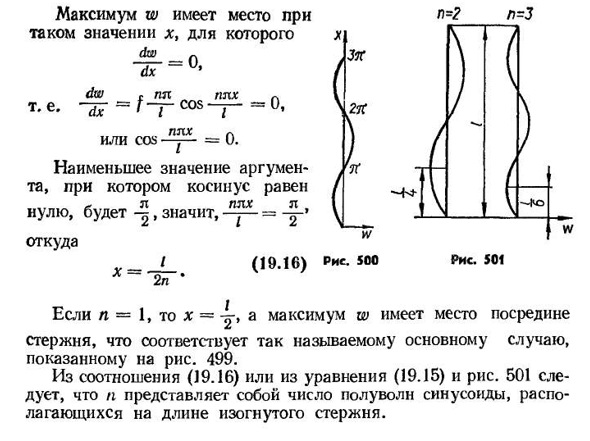
к уравнениям (19.10) и (19.12) и получим уравнение криволинейной оси стержня с малой деформацией: w (x)=sin PPC Максимальное отклонение штанги wMaKC= / s i n=в 1. Тогда U(х)*=я/Макс-Ф-21. Следовательно, выравнивание упругой линии сжатых стержней имеет ИД w=fsin(19.15) график этой зависимости показан на рисунке. 500. S04maximum w выполняется со значением x. Или COS — =0. Таким образом, минимальное значение аргумента, Косинус которого равен нулю, равно—=. в (19.16) пятьсот. Если I=1, то x=максимум w производится в середине стержня, что соответствует так называемому основному случаю, показанному на рисунке. Четыреста девяносто девять Из соотношения (19.16)или из выражения(19.15) и фиг. 501p — это число полуволн синусоиды, расположенных в длине изогнутого стержня.
Смотрите также:
