
Оглавление:


Эластика Эйлера
- Эйлер-Эластика рассмотрим задачу, поставленную в предыдущем абзаце, в точной формулировке. Запишем дифференциальное уравнение изгиба: EJxx=Т-ру. Кривизна х изогнутой оси dtyds, 6 изображена на рисунке. Угол между касательной изогнутой оси
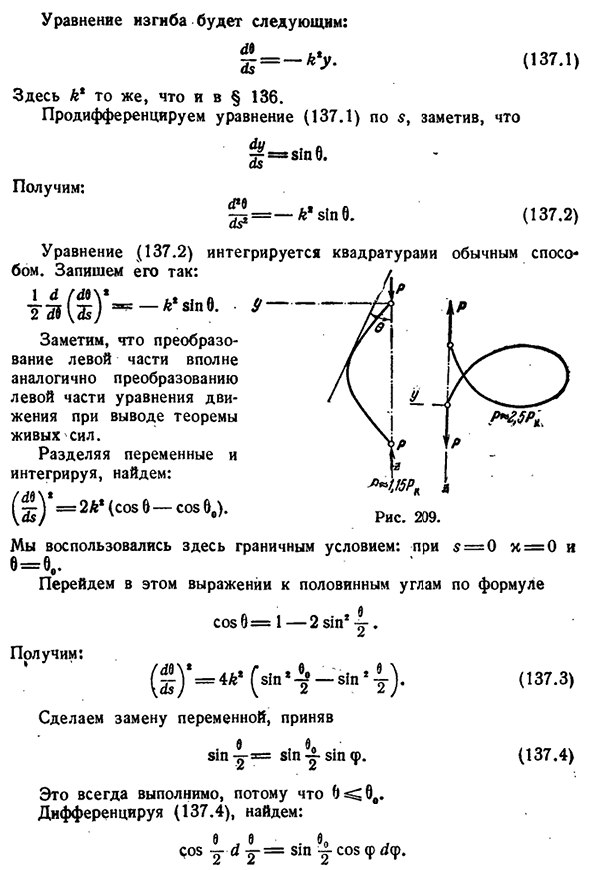
стержня 209 и осью, проходящей через его концы.§ 137) упругость Эйлера 303 Уравнение изгиба выглядит следующим образом: — £=- >•(137.1) Где k — то же самое, что и§ 136. Дифференцируем уравнение(137.1) на$ г=S Я ч0. Возьми: LGL^= — fc’sino. (137.2)уравнение (137.2) интегрируется ортогонально обычным способом. 4^(1) A’s i n0-заметим, что преобразование левой части весьма
похоже на преобразование левой части уравнения движения при выводе Людмила Фирмаль
теоремы о живой силе. Если разделить и интегрировать переменные, то получится (■jjy=2A’(cos0-cos0O)). Здесь мы использовали граничное условие:$=0x=0 и 0=o. Передадим это выражение на половину угла в соответствии с выражением cos9=1-2sin’. Возьми: (гы=Ш(х, 0. Я 5, » 4). Возьмем 9 и заменим переменную. Грех-г- = г Ф грех грехом. Это всегда возможно из-за 6^0. Дифференциация (137.4), находим: cos9l9 * 90 д у=Sin г п О С Е ды. (137.3) (137.4)304 устойчивость упругого
и пластического равновесия[гл. ДВЕНАДЦАТЫЙ Преобразует выражение (137.3) в новую переменную. Мы получим, разделяя переменные: ДС — (137.5)) Вранье. Обратите внимание, что левая часть y=0 6=6O и f=l / 2. Поэтому, когда вы консолидируете от нуля до s от l / 2 до f, вы получаете: По= 1_G Д<Ф К J в У1-тг sin2f*к/г Знак минус выбирается для первого интегрального типа очереди, опуская обычную нотацию У >0. Это эллипс, который является табличной функцией. Для эллиптического интеграла: K/1F=C-y= Джей У1-m2sin2f’ Отчет п Л Ф) — J_m!! sin2f, о < / Ф < / Ф П О Л У ч и М:
- К С= — Ф (Щ) — \ — Ф. Когда y=/ / 2 6=0 из-за симметрии, и поэтому CP=0. И так оно и есть. Ф.^= (137.6) Из этого уравнения определяют неизвестную величину t, которая связана с углом наклона касательной на конце стержня. Теперь можно найти координаты точек криволинейных осей стержней x и y, отталкиваясь от уравнения ДХ 0du в ■и J — =stn6, — Ф — = cos6. ДС, ДС Используя (137.4) и (137.5), перейдем к независимой переменной f. получим:
dx=sin6ds—sin f t/f, d y = cos6ds — £2p^l-m * sin’F-T1G VTG f]§ 138] значительные усилия в других типах крепежных стержней 305 Интегрируя и принимая во внимание, что x=y=0f=l / 2, получим параметрическое уравнение кривой оси: 2Т х= — г-соѕ Ф 1(137.7) [2 (е-ф(ф))-(е-ф(ф))]. Здесь. ф Е (Ф)=J и В1-Т ’ sin2f б/ф — Эллиптические интегралы второго рода; Фунт стерлингов ( | ) = £- Обратимся теперь к изучению уравнения (137.6). Полный эллиптический Интеграл F не может быть меньше l / 2. Таким образом, для A/^>l это уравнение не имеет решения. Однако в случае K l-a Г_ _ р-н? ЭДЖ г-К-Р’
Это первая серьезная сила. Следовательно, p>P K. At при этом каждому Людмила Фирмаль
значению P соответствует полностью определенное значение t по формуле (137.6) и определенная кривая отклонения-упругость Эйлера, по уравнению (137.7) По мере того как нагрузка увеличивает, отклонение увеличивает очень быстро. 209. Понятно, почему определить криволинейную форму равновесия с P>PK можно только с помощью точного уравнения. В этих формах отклонение велико, и установленные линейные уравнения подходят только для небольших отклонений.
Смотрите также:
| Постановка вопроса об устойчивости | Критические силы при иных видах закрепления стержня |
| Устойчивость сжатого упругого стержня | Потеря устойчивости за пределом упругости |
