
Оглавление:
Электрическая машина представляет собой электромагнитную систему, которая состоит из взаимосвязанных магнитной и электрических цепей. Магнитная цепь включает неподвижный и подвижный магнитопроводы из магнитного материала и немагнитный воздушный зазор, отделяющий их друг от друга.
Электрические цепи — в виде двух или нескольких обмоток — могут перемещаться одна относительно другой совместно с магнитопроводами, на которых они размещены.
Электромеханическое преобразование энергии в электрических машинах основано на явлении электромагнитной индукции и связано с электродвижущими силами (ЭДС), которые индуктируются в процессе периодического изменения магнитного поля, происходящего при механическом перемещении обмоток или элементов магнитопровода. Электрич
| Если что-то непонятно — вы всегда можете написать мне в WhatsApp и я вам помогу! |

Электрические машины
Значительная часть электрической энергии, потребляемой различными отраслями хозяйства, преобразуется вновь в механическую энергию, необходимую для приведения в действие машин, механизмов, станков. Это преобразование осуществляется при помощи электрических машин, называемых электрическими двигателями.
Использование электрических машин в качестве генераторов или двигателей является главным (прямым) их применением. Но электрические машины имеют и другие назначения. Так, потребление электроэнергии часто связано с преобразованием рода электрического тока, например переменного тока в постоянный, или же с преобразованием величины напряжения. Такие преобразования осуществляются посредством электромашинных преобразователей.
Электрические машины используют также и для усиления мощности электрических сигналов. В этом случае электрическая машина называется электромашинным усилителем.
Классификация электрических машин
По назначению электрические машины разделяются на генераторы, двигатели и преобразователи. Электрический генератор преобразует механическую энергию приводного двигателя в электрическую энергию. Электрический двигатель, наоборот, преобразует подводимую к нему электрическую энергию в механическую энергию вала. Электромашинный преобразователь преобразует электрическую энергию одного вида в электрическую энергию другого вида, изменяя род тока, величину напряжения, частоту, число фаз. Примером преобразователя может служить трансформатор.
По роду тока различают электрические машины постоянного, переменного тока и универсальные. Машины переменного тока по принципу работы разделяются на синхронные и асинхронное. Машины переменного тока по числу фаз могут быть одно-, двух- и трехфазные. Двигатели постоянного тока небольшой мощности могут использоваться и при работе на переменном токе, т.е, применяться как универсальные.
Машины постоянного тока относятся к коллекторным машинам, машины переменного тока- к бесколлекторным машинам, за исключением специального типа машин.
По мощности условно можно выделить следующие группы электрических машин:
- микромашины имеют мощность до 0,5 кВт;
- машины малой мощности — от 0,5 кВт до 10 кВт;
- машины средней мощности — от 10 кВт до ТОО кВт;
- крупные машины имеют мощность свыше 100 кВт.
По применению различаются электромашины общепромышленного и специального применения. Существуют и другие виды классификации электрических машин .
Каждая электрическая машина снабжается паспортом и обычно щитком, укрепленном на корпусе, где указаны тип машины и её эксплуатационные данные, относящиеся к номинальному режиму работы (режиму, ,для работы в котором изготовлена машина). Величины, относящиеся к номинальному режиму работы называются номинальными и обычно снабжаются индексом «н». Например, номинальные значения мощности  , напряжения
, напряжения  тока
тока  , частоты вращения
, частоты вращения  , КПД
, КПД  и т.д. На щитке могут быть указаны и другие данные (схема соединения обмоток и т.п.).
и т.д. На щитке могут быть указаны и другие данные (схема соединения обмоток и т.п.).
Электрические машины обладают принципом обратимости, т.е. машина может работать как в генератором, так и в двигательном режиме.
Классификация электромашинных устройств автоматики
По назначению, которые выполняют электрические машины в схемах автоматики, телемеханики и вычислительной техники, можно выделить следующие группы:
- силовые двигатели автоматики;
- исполнительные или управляемые двигатели;
- информационные электромашинные устройства (тахогенераторы, вращающиеся трансформаторы, сельсины в трансформаторном режиме);
- электромашинные преобразователи;
- электромашинные усилители;
- электромашинные устройства гироскопических систем и т.д.
Известно, что системы автоматики могут осуществляться как разомкнутыми, так и замкнутыми. Последние представляют собой наиболее распространенный вид систем. В них чаще всего используется принцип работы по отклонению, заключающийся в том, что регулируемая величина (например, частота вращения двигателя) сравнивается измерительным устройством с заданным значением и при отклонении от него система вырабатывает сигнал управления, который, после усиления поступает к исполнительному устройству (в данном случае -двигателю), возвращая регулируемую величину к заданному значению. Примером использования электромашинных элементов в разомкнутых системах могут служить шаговые двигатели, угол поворота которых строго пропорционален числу управляющих импульсов поданных в его обмотки.
В замкнутых системах электромашинные элементы находят применение в качестве любого из трех составляющих систему устройств: измерительного (тахогенераторы, сельсины , вращающиеся трансформаторы), усилительного (электромашинные усилители различных типов) и исполнительного (генераторы в источниках электроэнергии, двигатели различных типов в системах регулирования частоты вращения или угла поворота).
Машины постоянного тока. Общие сведения. Устройство
На рис. 4.1 показано устройство машины постоянного тока (М П Т) средней мощности [ 2 ]. Неподвижная часть электрической машины называется статором, вращающаяся часть- ротором. Эти части разделены воздушным зазором.

Статор состоит из станины 6, на внутренней поверхности которой расположены главные полюса 4, прикрепленные к станине болтами. Станина, помимо механической нагрузки, выполняет роль элемента магнитной цепи и служит для замыкания магнитного потока. Станина изготовляется из стали или чугуна — материалов, в которых сочетается высокая механическая прочность с большой магнитной проницаемостью.
Главные полюса машины состоят из сердечника полюса, полюсного наконечника и катушки возбуждения 5. Сердечник полюса может быть литым, но чаще его набирают из штампованных листов электротехнической стали, стягивая их шпильками. Полюсный наконечник обеспечивает необходимое распределение магнитной индукции в воздушном зазоре. Катушка полюса изготавливается из медного изолированного провода. Катушки всех главных полюсов электрически соединяются, образуя обмотку возбуждения, питаемую постоянным током. В машинах малой мощности главные полюса могут выполняться в виде постоянных магнитов. Полярность полюсов чередуется. Число полюсов 2р всегда четное. В теории обычно рассматриваются двухполюсные машины, так как процессы под каждой парой полюсов идентичны, хотя в реальных машинах число полюсов может быть больше двух. В машинах мощностью свыше 1 кВт между главными полюсами устанавливают дополнительные полюса для уменьшения искрения под щетками.
Ротор М П Т называется якорем. Сердечник якоря 3 (рис. 4.1) представляет собой цилиндр, набранный из штампованных листов электротехнической стали толщиной 0,35 или 0,5 мм. Листы стали оксидируются или покрываются изолирующим лаком для уменьшения потерь на вихревые токи, которые возникают в результате вращения якоря в магнитном поле. Листы стали имеют пазы для укладки обмотки. Часто пазы якоря делают со скосом (рис.4.1), что ослабляет пульсацию магнитной индукции в воздушном зазоре и способствует уменьшению вибраций и шума в процессе работы.
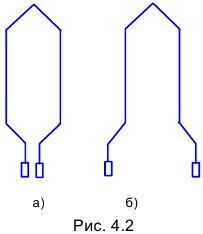
Обмотка якоря 9 состоит из секций (катушек), выполненных из медного изолированного провода (рис.4.2). В серийных МПТ средней мощности обмотка якоря обычно выполняется простой волновой (рис.4.2, б) или простой петлевой (рис.4.2, а). Волновая обмотка более экономична. Число параллельных ветвей для нее 2а = 2. Однако применение этой обмотки ограничено величиной тока якоря (до 600 А).
Простая петлевая обмотка имеет число параллельных ветвей 2а = 2р. При больших токах якоря применяют сложные обмотки. Расстояние между сторонами одной секции обмотки примерно равно полюсному делению т (расстоянию между осями соседних полюсов). Обмотка укладывается в пазы якоря и закрепляется проволочным бандажом или клиньями. Лобовые части обмотки 9 (рис.4.1) закреплены бандажом.
Концы обмотки якоря присоединяются к коллектору 1, укрепленному на валу. Коллектор представляет собой набор медных пластин, изолированных друг от друга и от вала. В машинах малой и средней мощности пластины коллектора часто запрессовывают в пластмассу. На коллектор налегают щетки 2. Щетки располагаются в щеткодержателях и прижимаются к коллектору пружинами. Щетки соединены с коробкой выводов клеммной платой.
В машинах специального назначения полюсные наконечники могут
иметь пазы, в которых располагается компенсационная обмотка, питаемая от обмотки якоря.
Помимо указанных частей машина имеет подшипниковые щиты: передний (со стороны коллектора) и задний 7 (с противоположной стороны). Подшипники обычно применяются шариковые и роликовые (со стороны привода). Для охлаждения машины служит встроенный вентилятор 8.
Режим генератора
Рассмотрим простейший генератор, представляющий собой рамку в виде двух проводников длиной I , соединенных в виток (рис.4. 3).
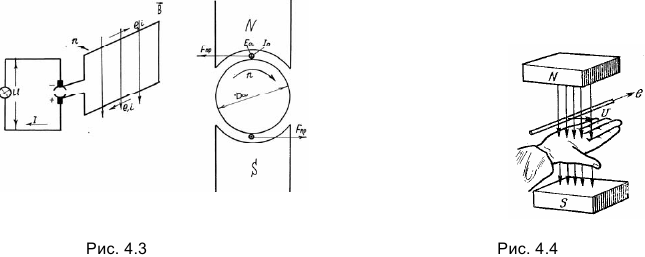
Поместим рамку в магнитное поле с индукцией В. Предположим, что якорь машины приводится во вращение по часовой стрелке и линейная скорость проводников равна v. Тогда в проводниках обмотки якоря индуктируется ЭДС вращения, величина которой определяется по закону Фарадея
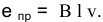
Направление ЭДС проводника показано на рис. 4.3 и может быть определено по мнемоническому правилу правой руки: силовые линии входят в ладонь, большой палец показывает направление движения проводника, четыре пальца — направление ЭДС (рис.4. 4).
Как видно из рис. 4.3, ЭДС двух проводников по контуру витка складываются и полная ЭДС данного витка:  .
.
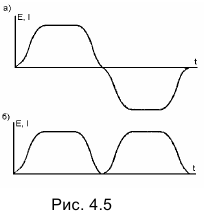
ЭДС обмотки якоря является переменной во времени, так как проводники обмотки якоря проходят попеременно под северным и южным полюсами, в результате чего направление ЭДС в проводниках меняется. По форме кривая ЭДС проводника повторяет кривую распределения индукции вдоль воздушного зазора (рис. 4.5, а).
Частота ЭДС

где р -число пар полюсов; n — частота вращения (об/мин).
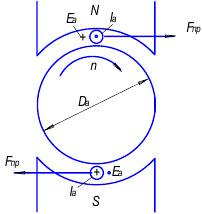
Если обмотка якоря с помощью щеток замкнута на внешнюю цепь, то возникает ток. В обмотке якоря этот ток будет переменным и кривая его по форме аналогична кривой ЭДС. Однако во внешней цепи направление ЭДС и тока (рис.4.5, б) будет постоянным, что объясняется действием коллектора. Действительно, при повороте якоря и коллектора на 180° и изменении направления ЭДС и тока в проводниках одновременно происходит смена коллекторных пластин под щетками. Вследствие этого под верхней щеткой всегда будет находиться пластина, соединенная с проводником, .расположенным под северным полюсом, а под нижней щеткой — пластина, соединенная с проводником, расположенным под южным полюсом. В результате этого полярность щеток и направление тока во внешней цепи остаются неизменными. Таким образом, в генераторе коллектор является механическим выпрямителем, который преобразует переменный ток обмотки якоря в постоянный ток внешней цепи. Для получения тока и напряжения, практически свободных от пульсаций, применяют обмотку якоря с большим числом проводников и коллекторных пластин.
Величина ЭДС обмотки якоря определяется общим числом проводников N обмотки, их соединением в параллельные ветви 2а, числом полюсов 2р машины, магнитным потоком полюса в воздушном зазоре Ф, частотой вращения п [ 1 ]

где конструктивная постоянная машины

ЭДС обмотки якоря можно также выразить формулой

где угловая частота вращения

конструктивная постоянная

Выходное напряжение (напряжение нагрузки) будет меньше, чем величина ЭДС

где падение напряжения в якорной цепи

 — сопротивление цепи якоря;
— сопротивление цепи якоря;  — падение напряжения в щеточном контакте. Обычно применяются угольно-графитные щетки, для которых принимается
— падение напряжения в щеточном контакте. Обычно применяются угольно-графитные щетки, для которых принимается  .
.
Объединяя два последних члена, можно записать:
где R — суммарное сопротивление якорной цепи с учетом сопротивления щеточного контакта.
При протекании тока по проводникам якоря, находящимся в магнитном поле, на них будут действовать электромагнитная сила Ампера (рис. 4.3)
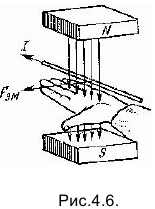
Направление силы определяется по правилу левой руки (рис.4.6): силовые линии входят в ладонь, четыре пальца показывают направление тока, большой палец покажет направление силы. Эти электромагнитные силы, действующие на проводники с током, помещенные в магнитное поле, создают электромагнитный момент. В режиме генератора электромагнитный момент является тормозным, так как он действует против направления вращения якоря.
Величина момента определяется формулой [ 1 ]

Полезная мощность генератора

Режим двигателя
Электрическая машина может работать как в режиме генератора , так и в режиме двигателя (принцип
обратимости). В режиме двигателя (рис.4.7) необходимо к обмотке якоря подвести постоянный ток от внешнего источника. При этом коллектор превращает потребляемый из внешней цепи постоянный ток в переменный ток обмотки якоря и работает в качестве механического инвертора тока.
На проводники с током обмотки якоря действуют электромагнитные силы (4.11) и возникает электромагнитный момент (4.12)

Момент двигателя является движущим и приводит якорь во вращение. Если мы желаем, чтобы при той же полярности полюсов направления вращения генератора (рис.4.3) и двигателя (рис.4.7) были одинаковы, то направление тока двигателя должно быть обратным по сравнению с генератором.
После того, как ротор якоря придет во вращение, в проводниках обмотки якоря будет индуктироваться ЭДС (4.3), (4.5)

В режиме двигателя направление ЭДС Е и направление тока якоря  противоположны, поэтому ЭДС якоря двигателя называют противо -ЭДС. В режиме генератора направление ЭДС Е и тока якоря совпадают.
противоположны, поэтому ЭДС якоря двигателя называют противо -ЭДС. В режиме генератора направление ЭДС Е и тока якоря совпадают.
Приложенное к якорю двигателя напряжение уравновешивается ЭДС Е и падением напряжения в обмотке якоря:

или

Из сравнения формул напряжения генератора и двигателя видно, что в генераторе  , а в двигателе
, а в двигателе  .
.
Полезная мощность двигателя
где  — полезный момент на валу, угловая частота вращения (4.6).
— полезный момент на валу, угловая частота вращения (4.6).

Потери мощности
Преобразование энергии в электрических машинах связано с потерями. Полезная мощность  , отдаваемая машиной, всегда меньше потребляемой мощности
, отдаваемая машиной, всегда меньше потребляемой мощности  , подводимой к машине, на величину потерь
, подводимой к машине, на величину потерь  . Потери мощности снижают КПД, вызывают нагрев, ухудшают её эксплуатационные свойства. Основные потери мощности подразделяют на механические, магнитные и электрические .
. Потери мощности снижают КПД, вызывают нагрев, ухудшают её эксплуатационные свойства. Основные потери мощности подразделяют на механические, магнитные и электрические .
Механические потери складываются из потерь на трение в подшипниках, щеток о коллектор, вращающихся частей машины о воздух, а также из потерь на вентиляцию машины. Механические потери возрастают с увеличением частоты вращения (часть потерь в квадрате, часть — в кубе).
Магнитные (потери в стали) и электрические (потери в обмотках) составляют электромагнитные потери.
Потери в стали подразделяются на два вида: на гистерезис (перемагничивание) и вихревые токи. Можно принять, что потери в стали пропорциональны квадрату индукции (квадрату подводимого напряжения). Потери на гистерезис пропорциональны частоте f (4.2) пульсаций потока в первой степени, а потери на вихревые токи пропорциональны квадрату частоты.
Механические и магнитные потери не зависят от величины тока якоря и называются постоянными.
Электрические потери — потери в обмотках пропорциональны квадрату тока, протекающего по обмотке, и ее сопротивлению  . Эти потери называются переменными, так как они зависят от величины нагрузки машины.
. Эти потери называются переменными, так как они зависят от величины нагрузки машины.
Кроме основных потерь, в машине существуют добавочные потери, например в полюсных наконечниках; в сердечнике якоря, вызванные искажением поля; в обмотке якоря от вихревых токов и т.п. Величина этих потерь принимается равной 0,5 — 1% от полезной мощности (меньшая цифра относится к машинам, снабженным компенсационной обмоткой).
Коэффициент полезного действия (КПД) представляет собой отношение полезной мощности к подведенной

Так как величина электрических потерь зависит от нагрузки машины, то с ее изменением меняется величина КПД . Максимум КПД соответствует равенству постоянных и переменных потерь.
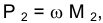
Реакция якоря. Поперечная реакция якоря
В режиме холостого хода машины имеется только магнитное поле, создаваемое обмоткой возбуждения. Картина этого поля изображена на рис. 4.8,а. Ось поля возбуждения и его МДС Ев направлена вдоль оси полюсов, называемой продольной осью машины d-d . При нагрузке машины в обмотке якоря протекает ток который создает собственное
магнитное поле якоря. Под действием поля якоря результирующее поле машины искажается. Это явление называется реакцией якоря.
Рассмотрим реакцию якоря при установке щеток на геометрической нейтрали 0-0, являющейся поперечной осью q-q. На рис. 4.8, б показано поле обмотки якоря. Ось поля и его МДС  направлены всегда по линии щеток и в данном случае совпадают с поперечной осью q-q. Направление силовых линий магнитного поля можно определить по мнемоническому правилу «буравчика». При установке щеток на геометрической нейтрали поле якоря направлено поперек поля возбуждения и в этом случае реакция якоря называется поперечной, а МДС якоря обозначается
направлены всегда по линии щеток и в данном случае совпадают с поперечной осью q-q. Направление силовых линий магнитного поля можно определить по мнемоническому правилу «буравчика». При установке щеток на геометрической нейтрали поле якоря направлено поперек поля возбуждения и в этом случае реакция якоря называется поперечной, а МДС якоря обозначается  . Развиваемый в машине электромагнитный момент можно рассматривать как результат взаимодействия полюсов поля якоря и полюсов поля возбуждения.
. Развиваемый в машине электромагнитный момент можно рассматривать как результат взаимодействия полюсов поля якоря и полюсов поля возбуждения.
Результирующее магнитное поле определяется наложением полей возбуждения и якоря (рис.4.8,в). Поле соответствует случаю, когда в режиме генератора якорь вращается по часовой стрелке, а в режиме двигателя — против часовой стрелки. Как следует из рис. 4.8,в , поперечная реакция якоря вызывает ослабление поля под одним краем полюса и его усиление под другим вследствие того, что поле возбуждения и поле якоря на одном крае полюса совпадают по направлениям, а на другом крае направлены встречно. Под воздействием поперечной реакции якоря нейтральная линия на поверхности якоря, на которой индукция равна нулю (физическая нейтраль), поворачивается на некоторый угол  из положения геометрической нейтрали О — О в положение О’ — О’. В генераторе физическая нейтраль повернута в сторону вращения якоря, а в двигателе — в обратную сторону.
из положения геометрической нейтрали О — О в положение О’ — О’. В генераторе физическая нейтраль повернута в сторону вращения якоря, а в двигателе — в обратную сторону.
Количественное влияние поперечной реакции якоря зависит от степени насыщения магнитной цепи.
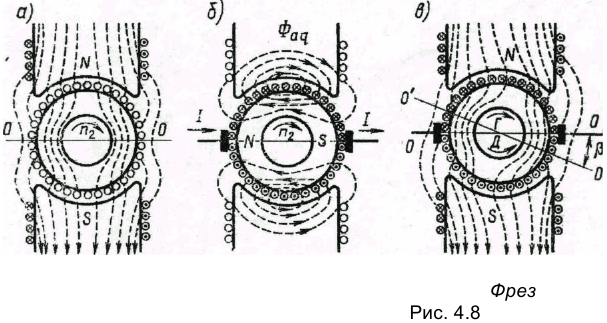
Если бы магнитная цепь машины была не насыщена, то поперечная реакция якоря не приводила бы к количественному изменению магнитного потока. Однако насыщение магнитной цепи машины ограничивает рост магнитного потока, поэтому уменьшение поля на одном крае полюса не компенсируется его увеличением на другом крае.
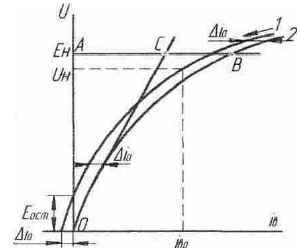
Действительно, рассмотрим магнитную характеристику машины В = f (F), представленную на рис. 4.9 . Пусть точка А соответствует режиму холостого хода при МДС возбуждения  При нагрузке под воздействием тока возникает МДС якоря . На одном крае полюса МДС и вычитаются, а на другом крае полюса складываются, что определяет величины соответствующих индукций:
При нагрузке под воздействием тока возникает МДС якоря . На одном крае полюса МДС и вычитаются, а на другом крае полюса складываются, что определяет величины соответствующих индукций:  на краях полюса. При этом магнитный поток под одним краем полюса
на краях полюса. При этом магнитный поток под одним краем полюса
уменьшается на величину, пропорциональную площади криволинейного треугольника АВД, а под другим краем полюса поток возрастает пропорционально площади АСЕ. Площади этих треугольников не равны друг другу, в результате произойдет уменьшение магнитного потока пропорционально разности площадей АВД и АСЕ.
Таким образом, поперечная реакция якоря вызывает искажение магнитного поля машины и уменьшение его величины вследствие насыщения магнитной цепи.
Общий случай реакции якоря
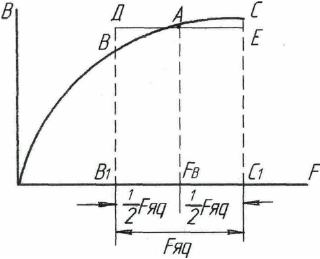
Рассмотрим случай, когда щетки сдвинуты с геометрической нейтрали на некоторый угол (рис.4.10). В этом случае поле обмотки якоря повернется вслед за поворотом щеток. Ось поля якоря всегда направлена по оси расположения щеток. МДС якоря можно разложить на две составляющие: продольную и поперечную  . Влияние поперечной реакции было рассмотрено выше.
. Влияние поперечной реакции было рассмотрено выше.
Действие продольной реакции якоря может быть двояким и зависит от направления сдвига щеток. При работе в режиме генератора сдвиг щеток по направлению вращения якоря приводит к появлению размагничивающей продольной реакции якоря, действующей встречно потоку возбуждения (рис.4.10,а), а сдвиг щеток против направления вращения — к появлению намагничивающей продольной реакции якоря (рис.4.10,б). Для режима двигателя справедливо обратное.
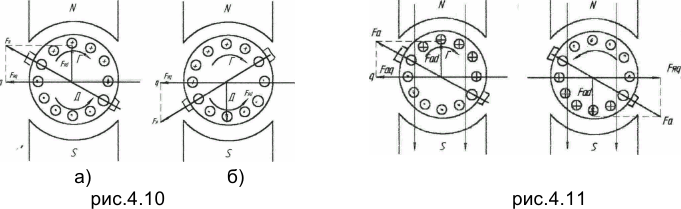
Неточная установка щеток на геометрической нейтрали является причиной погрешности асимметрии вращения прецизионных электрических машин, когда величина выходного сигнала изменяется при изменении направления вращения. Для примера рассмотрим работу тахогенератора при сдвиге щеток с геометрической нейтрали (рис.4.11).
Для данного угла сдвига щеток при правом вращении машины (по часовой стрелке) продольная реакция якоря  является размагничивающей и уменьшает магнитный поток возбуждения и, следовательно, величину ЭДС и выходного напряжения. При левом вращении машины (против часовой стрелки) продольная реакция якоря является намагничивающей и увеличивает магнитный поток и выходное напряжение Таким образом, при сдвиге щеток с нейтрали выходное напряжение тахогенератора изменяется при изменении направления вращения. Погрешность асимметрии вращения не должна превышать 1 … 3 %.
является размагничивающей и уменьшает магнитный поток возбуждения и, следовательно, величину ЭДС и выходного напряжения. При левом вращении машины (против часовой стрелки) продольная реакция якоря является намагничивающей и увеличивает магнитный поток и выходное напряжение Таким образом, при сдвиге щеток с нейтрали выходное напряжение тахогенератора изменяется при изменении направления вращения. Погрешность асимметрии вращения не должна превышать 1 … 3 %.
Аналогичная погрешность характерна и для исполнительных двигателей. Оценим приближенно величину частоты вращения из формулы ЭДС (4.3) в виде

Классификация машин постоянного тока по способу возбуждения
На рис. 4.13. показаны электрические схемы МПТ. В зависимости от способа включения обмоток возбуждения различают МПТ с независимым возбуждением (рис. 4.13, а,б) и с самовозбуждением : параллельным (рис. 4.13, в), последовательным (рис.4.13, г) и смешанным (рис.4.13, д).
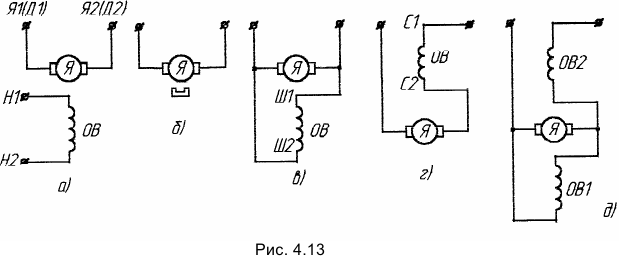
В машинах смешанного возбуждения имеется параллельная и последовательная обмотки возбуждения, в общем случае эти обмотки могут иметь согласное и встречное включение. При согласном включении магнитные потоки обмоток складываются, при встречном включении — вычитаются.
С возбуждением от постоянных магнитов (рис. 4.13, б) обычно изготавливают машины небольшой мощности.
ГОСТ 26772 — 85 устанавливает две различные системы обозначений выводов обмоток машин постоянного тока : для машин, разработанных после введения этого ГОСТ и для ранее разработанных машин, для которых сохраняется ранее принятая система обозначений (ГОСТ 183-74).
Согласно ГОСТ 183-74 система обозначений состоит из букв русского алфавита и цифр, причем начало обмотки снабжается индексом 1, конец
- индексом 2: обмотка якоря Я1, Я2; компенсационная обмотка К1, К2; последовательная обмотка возбуждения С1, С2; параллельная обмотка возбуждения Ш1,Ш2; независимая обмотка возбуждения Н1,Н2, пусковая обмотка П1.П2; уравнительный провод и уравнительная обмотка У1,У2; обмотка особого назначения 01, 02.
Обмотка добавочных полюсов обычно подразделяется внутри машины на две секции и между ними включается обмотка якоря. Начало и конец этой общей якорной цепи имеют обозначение Д1, Д2. При отсутствии добавочных полюсов стоят обозначения Я1, Я2.
Обмотка параллельного возбуждения Ш1, Ш2 может быть использована в качестве обмотки независимого возбуждения. В этом случае она включается на источник постоянного тока с напряжением примерно равным номинальному напряжению машины.
Обычно на корпусе машины стрелкой указывается направление вращения якоря. Если такая стрелка отсутствует, то машина должна иметь «правое» направление вращения, т.е. по часовой стрелке если смотреть на машину со стороны присоединения её к рабочему механизму или первичному двигателю.
Обозначение выводов обмоток МПТ выполняют так, чтобы при правом направлении вращения в режиме двигателя ток во всех обмотках (за исключением размагничивающих обмоток на главных полюсах) протекал в направлении от начала 1 к концу 2.
Для вновь разрабатываемых машин установлены обозначения, состоящие из букв латинского алфавита и цифр, обмотка якоря А1,А2; обмотка добавочных полюсов В1,В2; компенсационная обмотка С1,С2; последовательная обмотка возбуждения D1,D2; параллельная обмотка возбуждения Е1, Е2; независимая обмотка возбуждения F1, F2; вспомогательная обмотка по продольной оси Н1, Н2; вспомогательная обмотка по поперечной оси J1; J2.
Для обозначения выводов обмоток машин малой мощности при диаметре корпуса не более 40 мм и при отсутствии места для буквенноцифровых обозначений допускается цветовое обозначение. Цветовое обозначение имеет вид: обмотка якоря (начало и конец соответственно) белый и белый с черным; последовательная обмотка возбуждения -красный и красный с черным, дополнительный вывод красный с желтым, вторая группа катушек последовательной обмотки возбуждения синий с черным; дополнительная обмотка синий с желтым; параллельная обмотка возбуждения зеленый и зеленый с черным; вторая группа катушек параллельной обмотки желтый и желтый черным, последовательная обмотка возбуждения С1,С2 ; параллельная обмотка возбуждения Ш1,Ш2; независимая обмотка возбуждения Н1,Н2; пусковая обмотка П1 ,П2; уравнительный провод и уравнительная обмотка У1 ,У2;
обмотка особого назначения 01,02.
Обмотка добавочных полюсов обычно подразделяется внутри машины на две секции и между ними включается обмотка якоря. Начало и конец этой общей якорной цепи имеют обозначение Д1,Д2. При отсутствии добавочных полюсов стоят обозначения Я1,Я2.
Обмотка параллельного возбуждения Ш1,Ш2 может быть использована в качестве обмотки независимого возбуждения. В этом случае она включается на источник постоянного тока с напряжением, примерно равным номинальному напряжению машины.
Обычно на корпусе машины стрелкой указывается направление вращения якоря. Если такая стрелка отсутствует, то машина должна иметь «правое» направление вращения, т.е. по часовой стрелке, если смотреть на машину со стороны присоединения ее к рабочему механизму или первичному двигателю.
Обозначения выводов обмоток МПТ выполняют так, чтобы при правом направлении вращения в режиме двигателя ток во всех обмотках (за исключением размагничивающих обмоток на главных полюсах) протекал в направлении от начала 1 к концу 2. Для вновь разрабатываемых машин установлены обозначения, состоящие из букв латинского алфавита и цифр: обмотка якоря А1, А2; обмотка добавочных полюсов В1, В2; компенсационная обмотка С1, С2; последовательная обмотка возбуждения D1,D2; параллельная обмотка возбуждения Е1, Е2; независимая обмотка возбуждения F1,F2; вспомогательная обмотка по продольной оси Н1,Н2; вспомогательная обмотка по поперечной оси J1, J2 .
Для обозначения выводов обмоток машин малой мощности при диаметре корпуса не более 40 мм и при отсутствии места для буквенноцифровых обозначений допускается цветовое обозначение. Цветовое обозначение имеет вид: обмотка якоря (начало и конец соответственно) белый и белый с черным; последовательная обмотка возбуждения красный и красный с черным; дополнительный вывод красный с желтым; вторая группа катушек последовательной обмотки возбуждения синий и синий с черным; дополнительная обмотка синий с желтым; параллельная обмотка возбуждения зеленый и зеленый с черным; вторая группа катушек параллельной обмотки желтый и желтый с черным.
Генераторы постоянного тока
Основные уравнения
Генераторы постоянного тока (Г П Т) могут иметь следующие способы возбуждения: независимое, параллельное, последовательное или смешанное, электрические схемы которых представлены на рис. 4.13.
Генераторы последовательного возбуждения имеют специфические характеристики, отличные от других типов генераторов, и применяются только в специальных установках; в связи с ограничением области применения эти генераторы в дальнейшем не рассматриваются.
Основные формулы Г П Т были рассмотрены в п. 4.1.2.
Уравнение напряжения на зажимах генератора согласно (4.10)

ЭДС, индуктируемая в обмотке якоря , согласно (4.3)

Связь между результирующим магнитным потоком Ф и результирующей МДС F

представляет собой магнитную характеристику машины. Магнитное сопротивление RM магнитопровода зависит от степени насыщения. При наличии насыщения магнитная характеристика является нелинейной.
Результирующая МДС F в общем случае обусловлена совместным действием МДС обмоток параллельного (независимого)  и последовательного
и последовательного  возбуждения, продольной реакции якоря
возбуждения, продольной реакции якоря  и размагничивающим действием поперечной реакции якоря
и размагничивающим действием поперечной реакции якоря  При согласном действии МДС обмоток параллельного и последовательного возбуждения можно записать
При согласном действии МДС обмоток параллельного и последовательного возбуждения можно записать

Знак МДС продольной реакции якоря определяется направлением сдвига щеток с геометрической нейтрали и режимом работы машины. В большинстве случаев щетки в машине устанавливаются на геометрической нейтрали и тогда продольная реакция якоря отсутствует.
Размагничивающее действие поперечной реакции якоря имеет место в машинах с насыщенной магнитной системой. Можно принять, что величина этой МДС пропорциональна току якоря. В микромашинах, где насыщение магнитопровода незначительно, размагничивающим действием поперечной реакции якоря можно пренебречь.
Работа генератора характеризуется следующими основными величинами: напряжением на зажимах генератора U, током нагрузки I, током в обмотке возбуждения  и частотой вращения n. Г П Т обычно работают при практически постоянной частоте вращения, поэтому характеристики генераторов будем рассматривать при номинальной частоте вращения
и частотой вращения n. Г П Т обычно работают при практически постоянной частоте вращения, поэтому характеристики генераторов будем рассматривать при номинальной частоте вращения  . В этом случае соотношение величин
. В этом случае соотношение величин  образуют три семейства характеристик (ГОСТ 17154-71), которые рассмотрены ниже.
образуют три семейства характеристик (ГОСТ 17154-71), которые рассмотрены ниже.
Характеристики генераторов постоянного тока. Нагрузочные характеристики
Нагрузочные характеристики — это зависимость напряжения генератора U от тока возбуждения  при неизменном токе нагрузки I = const . Наибольший практический интерес представляют нагрузочные характеристики при I = 0 (характеристика холостого хода) и при номинальной нагрузке
при неизменном токе нагрузки I = const . Наибольший практический интерес представляют нагрузочные характеристики при I = 0 (характеристика холостого хода) и при номинальной нагрузке  .
.
а) характеристика холостого хода

Характеристика холостого хода (х.х.х.) снимается, как правило, при независимом возбуждении генератора. Она представляет собой зависимость ЭДС Е на зажимах генератора от тока возбуждения  при отсутствии тока якоря (I = 0) (рис. 4.14, .кривая 1).
при отсутствии тока якоря (I = 0) (рис. 4.14, .кривая 1).
Аналитическое выражение характеристик холостого хода с учетом уравнений (4.3), (4.19) имеет вид

где  — ток и число витков обмотки возбуждения.
— ток и число витков обмотки возбуждения.
С ростом тока возбуждения растет насыщение магнитной цепи и величина  , а рост ЭДС соответственно замедляется.
, а рост ЭДС соответственно замедляется.
Микромашины обычно работают на ненасыщенном участке характеристики холостого хода.
Снятие характеристики холостого хода опытным путем проводят при монотонном уменьшении тока возбуждения от максимального значения, соответствующего  , до нуля
, до нуля  . Остаточная ЭДС
. Остаточная ЭДС  при
при  наводится потоком остаточного намагничивания из-за явления гистерезиса (остаточного магнетизма) в материале полюсов и ярма. Обычно
наводится потоком остаточного намагничивания из-за явления гистерезиса (остаточного магнетизма) в материале полюсов и ярма. Обычно  .
.
Приведенную характеристику холостого хода (кривая 2) получают путем смещения оси координат на величину  . Для машин мощностью менее 1 кВт, сняв одну ветвь х.х.х., меняют полярность обмотки возбуждения на обратную и монотонно увеличивая ток до
. Для машин мощностью менее 1 кВт, сняв одну ветвь х.х.х., меняют полярность обмотки возбуждения на обратную и монотонно увеличивая ток до  .
.
Аналогично снимают восходящую ветвь характеристики, получив полную петлю. На практике пользуются средней кривой.
По характеристике холостого хода определяется ток возбуждения  ,соответствующий номинальному напряжению
,соответствующий номинальному напряжению  .
.
Характеристика холостого хода позволяет определить коэффициент насыщения магнитной системы  (рис.4.14), характеризующий степень отклонения х.х.х. от линейной зависимости. Коэффициент
(рис.4.14), характеризующий степень отклонения х.х.х. от линейной зависимости. Коэффициент  обычно определяется для номинальной ЭДС
обычно определяется для номинальной ЭДС  Для большинства генераторов нормального исполнения
Для большинства генераторов нормального исполнения  .
.
б) Нагрузочные характеристики при номинальном токе

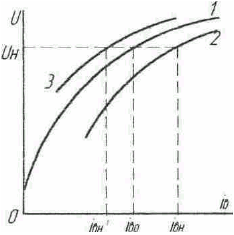
Нагрузочные характеристики генератора должны сниматься, как и х.х.х., при монотонном изменении тока возбуждения от большего значения к меньшему. Эти характеристики обычно снимаются при независимом и смешанном возбуждении (согласное включение обмоток). Нагрузочная характеристика генератора при параллельном возбуждении практически не отличается от аналогичной характеристики при
независимом возбуждении. На рис. 4.15 представлены нагрузочные характеристики генератора при независимом (кривая 2) и смешанном возбуждении (кривая 3), здесь же приведена х.х.х. (кривая 1). Нагрузочная характеристика генератора независимого возбуждения смещается по отношению к характеристике холостого хода вниз на величину падения напряжения в якорной цепи  (4.9) и вправо на величину тока возбуждения, необходимого для компенсации размагничивающего действия поперечной реакции якоря
(4.9) и вправо на величину тока возбуждения, необходимого для компенсации размагничивающего действия поперечной реакции якоря  . При смешанном возбуждении характеристика смещается влево на величину МДС последовательной обмотки
. При смешанном возбуждении характеристика смещается влево на величину МДС последовательной обмотки  . При достаточно большой величине нагрузочная характеристика может располагаться левее и выше характеристики холостого хода. По нагрузочным характеристикам при
. При достаточно большой величине нагрузочная характеристика может располагаться левее и выше характеристики холостого хода. По нагрузочным характеристикам при  можно определить номинальные значения тока возбуждения при независимом и смешанном возбуждении генератора.
можно определить номинальные значения тока возбуждения при независимом и смешанном возбуждении генератора.
Внешние характеристики

Внешние характеристики — это зависимости напряжения генератора U от тока нагрузки  при нерегулируемом токе возбуждения, т.е. при постоянном сопротивлении цепи обмотки возбуждения
при нерегулируемом токе возбуждения, т.е. при постоянном сопротивлении цепи обмотки возбуждения  . Наибольший практический интерес представляет внешняя характеристика при таком
. Наибольший практический интерес представляет внешняя характеристика при таком  , которое обеспечивает номинальное напряжение при номинальном токе нагрузки, т.е. при
, которое обеспечивает номинальное напряжение при номинальном токе нагрузки, т.е. при  .
.
Внешние характеристик генератора снимаются при независимом, параллельном и смешанном способах возбуждения. Эти характеристики должны сниматься при уменьшении тока нагрузки. Вид внешних характеристик показан на рис. 4.16.
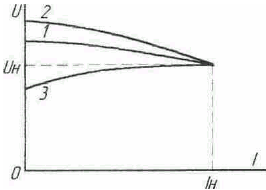
При испытании генератора независимого возбуждения (кривая 1) условие  приводит к условию
приводит к условию  и с изменением тока нагрузки напряжение U изменяется из-за действия двух факторов: падения напряжения в якорной цепи
и с изменением тока нагрузки напряжение U изменяется из-за действия двух факторов: падения напряжения в якорной цепи  (4.9) и размагничивающего действия реакции якоря
(4.9) и размагничивающего действия реакции якоря  .
.
При параллельном возбуждении ток возбуждения определяется величиной напряжения генератора и не остается постоянным. С изменением тока возбуждения изменяется величина магнитного потока, индуктируемая им ЭДС якоря и напряжение на зажимах U . Таким образом, при параллельном возбуждении действует, кроме вышеназванных факторов  , третий фактор -изменение тока возбуждения
, третий фактор -изменение тока возбуждения  . Поэтому действие тока якоря на величину выходного напряжения проявляется в большей степени.
. Поэтому действие тока якоря на величину выходного напряжения проявляется в большей степени.
При смешанном возбуждении генератора последовательная обмотка компенсирует перечисленные факторы. При достаточно большой МДС последовательной обмотки внешняя характеристика может иметь вид кривой 3, рис.4.16.
По внешним характеристикам можно определить изменение напряжения  при изменении нагрузки от номинальной до холостого хода:
при изменении нагрузки от номинальной до холостого хода: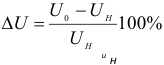
где  — напряжение генератора при холостом ходе.
— напряжение генератора при холостом ходе.
Регулировочные характеристики

Регулировочные характеристики — это зависимости тока возбуждения от тока нагрузки  при постоянном напряжении U генератора.
при постоянном напряжении U генератора.
Наибольший интерес представляет характеристика, снятая при номинальном напряжении генератора  . Регулировочные характеристики обычно снимаются при независимом и смешанном возбуждении. При параллельном возбуждении регулировочная характеристика аналогична характеристике при независимом возбуждении. Регулировочные характеристики также, как и внешние, снимаются при уменьшении тока нагрузки от номинального до нуля. В процессе снятия характеристики ток возбуждения изменяют так, чтобы напряжение оставалось номинальным.
. Регулировочные характеристики обычно снимаются при независимом и смешанном возбуждении. При параллельном возбуждении регулировочная характеристика аналогична характеристике при независимом возбуждении. Регулировочные характеристики также, как и внешние, снимаются при уменьшении тока нагрузки от номинального до нуля. В процессе снятия характеристики ток возбуждения изменяют так, чтобы напряжение оставалось номинальным.
Вид характеристик показан на рис.4.17. При независимом возбуждении на характеристику (кривая 1) влияют падение напряжения в якорной цепи  . и размагничивающее действие поперечной реакции якоря
. и размагничивающее действие поперечной реакции якоря  . Нелинейность характеристики зависит от степени насыщения магнитной системы генератора.
. Нелинейность характеристики зависит от степени насыщения магнитной системы генератора.
При смешанном возбуждении генератора вид характеристики (кривая 2) зависит от величины МДС последовательной обмотки возбуждения  . При значительной МДС ток возбуждения при нагрузке может быть меньше, чем при холостом ходе.
. При значительной МДС ток возбуждения при нагрузке может быть меньше, чем при холостом ходе.
По регулировочным характеристикам для каждого способа возбуждения определяется изменение тока возбуждения при изменении нагрузки от номинальной до нуля
Особенности генератора параллельного возбуждения
Преимущество генератора параллельного возбуждения состоит в том, что он не требует постороннего источника постоянного тока -возбудителя, так как обмотка возбуждения питается непосредственно с напряжения якоря . Самовозбуждение генератора параллельного возбуждения возможно не всегда и происходит при соблюдении определенных условий:
а) наличия остаточного магнитного потока полюсов  ;
;
б) правильного подключения концов обмотки возбуждения (правильной полярности) или правильного направления вращения, так чтобы дальнейшее увеличение тока возбуждения совпадало по направлению с первоначальным;
в) сопротивление цепи возбуждения  , при данной частоте вращения должно быть ниже некоторого критического значения или частота вращения при данном должна быть выше некоторой критической величины.
, при данной частоте вращения должно быть ниже некоторого критического значения или частота вращения при данном должна быть выше некоторой критической величины.
Процесс самовозбуждения протекает следующим образом Небольшая ЭДС, индуктируемая в якоре остаточным магнитным потоком  , вызывает в обмотке возбуждения малый ток . При правильной полярности включения обмотки возбуждения этот ток вызывает увеличение потока полюсов и , следовательно, увеличение ЭДС, которая в свою очередь обуславливает дальнейшее увеличение и т.д.
, вызывает в обмотке возбуждения малый ток . При правильной полярности включения обмотки возбуждения этот ток вызывает увеличение потока полюсов и , следовательно, увеличение ЭДС, которая в свою очередь обуславливает дальнейшее увеличение и т.д.
Напряжение на обмотке возбуждения
где  — ЭДС самоиндукции;
— ЭДС самоиндукции;
 — индуктивность и сопротивление цепи возбуждения.
— индуктивность и сопротивление цепи возбуждения.
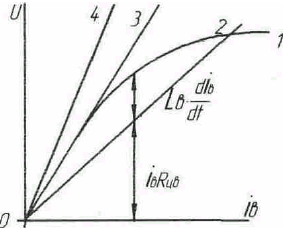
На рис. 4.18 показаны х.х.х.  (кривая 1) и вольтамперная характеристика
(кривая 1) и вольтамперная характеристика  цепи возбуждения (кривая 2). Разность их ординат составляет
цепи возбуждения (кривая 2). Разность их ординат составляет  . Если прямая 2 проходит ниже х.х.х 1, то
. Если прямая 2 проходит ниже х.х.х 1, то  , что вызывает рост тока .
, что вызывает рост тока .
Процесс самовозбуждения продолжается до тех пор пока не пересекутся кривые 1 и 2, при этом  . Чем больше величина
. Чем больше величина  , тем больший угол наклона имеет характеристика
, тем больший угол наклона имеет характеристика  . При критическом значении
. При критическом значении  кривая 3 имеет вид касательной к х.х.х. и процесс самовозбуждения неустойчив. При
кривая 3 имеет вид касательной к х.х.х. и процесс самовозбуждения неустойчив. При  получим кривую 4, которая не пересекается с х.х.х. и процесс самовозбуждения невозможен. Однако, увеличив частоту вращения и тем самым увеличив ЭДС, можно добиться самовозбуждения генератора.
получим кривую 4, которая не пересекается с х.х.х. и процесс самовозбуждения невозможен. Однако, увеличив частоту вращения и тем самым увеличив ЭДС, можно добиться самовозбуждения генератора.
Передаточная функция
Передаточная функция представляет собой отношение выходной величины У к входной X в их операторных изображениях по Лапласу

Рассмотрим работу ГПТ независимого возбуждения в режиме холостого хода при постоянной частоте вращения n. В этом случае выходной величиной является ЭДС Е. Входной величиной является напряжение управления Uy, подаваемое на обмотку возбуждения, которая в данном случае служит обмоткой управления. Связь между ЭДС Е и током управления  устанавливается через магнитный поток Ф согласно (4.21).
устанавливается через магнитный поток Ф согласно (4.21).
Пренебрегая насыщением магнитной цепи и размагничивающим действием Поперечной реакции якоря, считаем, что величина магнитного потока Ф прямо пропорциональна току управления . Тогда

где  — коэффициент пропорциональности, зависящий от частоты вращения n.
— коэффициент пропорциональности, зависящий от частоты вращения n.
В операторной форме записи
Уравнение напряжения на зажимах обмотки управления в переходных режимах при изменении тока управления согласно (4.22)
В изображении по Лапласу производная  записывается в виде «р».
записывается в виде «р».
Тогда

Передаточная функция с учетом вышеприведенных соотношений

Таким образом, Г П Т представляет собой усилительное инерционное звено первого порядка. Статический коэффициент усиления генератора

пропорционален частоте вращения n.
Электромагнитная постоянная времени обмотки управления  равна отношению индуктивности
равна отношению индуктивности  к активному сопротивлению
к активному сопротивлению 

и определяет скорость нарастания тока в обмотке,
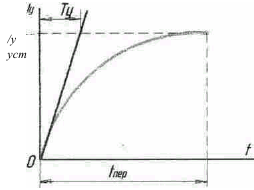
Кривая нарастания тока  (рис.4.19) представляет собой экспоненту. Постоянная времени Ту равна отрезку, который отсекается касательной к экспоненте от линии установившегося значения тока. Время переходного процесса составляет
(рис.4.19) представляет собой экспоненту. Постоянная времени Ту равна отрезку, который отсекается касательной к экспоненте от линии установившегося значения тока. Время переходного процесса составляет  , в зависимости от точности (1…5 %) Достижения установившегося значения тока
, в зависимости от точности (1…5 %) Достижения установившегося значения тока 
Электромашинные усилители
Общие сведения
Электромашинный усилитель (ЭМУ) представляет собой специальный генератор (обычно постоянного тока), выходная мощность Рвых которого во много раз превосходит входную Ру. Важнейшим параметром ЭМУ является коэффициент усиления по мощности

равный произведению коэффициентов усиления по току и напряжению

Усиление электрической мощности происходит за счет механической мощности приводного двигателя.
ЭМУ предназначен для работы в переходных режимах. В связи с этим предъявляются особые требования к быстродействию и перегрузочной способности ЭМУ. Перегрузочная способность характеризуется степенью возможной форсировки по току и напряжению. Степенью форсировки (коэффициентом перегрузки) называется отношение соответствующих максимальных величин к номинальным. Форсировка по току ограничена условиями коммутации (искрением на коллекторе). Для улучшения коммутации ЭМУ снабжаются добавочными полюсами и компенсационной обмоткой. Форсировка по напряжению ограничена насыщением магнитной цепи. Для повышения перегрузочной способности и коэффициента усиления ЭМУ рассчитываются на низкие электромагнитные нагрузки (магнитную индукцию и плотность тока).
На быстродействие ЭМУ большое влияние оказывает электромагнит ная постоянная времени обмотки Т. Обычно ЭМУ имеют несколько обмоток управления для суммирования сигналов. При этом можно осуществлять управление в зависимости от нескольких величин (например, от частоты вращения и тока якоря двигателя прокатного стана и т.п.).
Качество ЭМУ характеризуется добротностью

В современных ЭМУ постоянная времени Т обмоток составляют сотые доли секунды для маломощных ЭМУ (до 1 кВт) и десятые доли секунды для ЭМУ мощностью свыше 10 кВт, а коэффициент усиления Кр может достигать сотни тысяч.
Одноступенчатые и двухступенчатые ЭМУ
Простейшим ЭМУ является обычный генератор постоянного тока с независимым возбуждением (рис. 4.13, а) с одной ступенью усиления мощности — от обмотки возбуждения (управления) к обмотке якоря. Входная электрическая мощность возбуждения (управления) значительно меньше, чем выходная мощность якорной цепи. Коэффициент усиления по мощности составляет Кр = 10…50. Рассмотрим, каким образом можно повысить коэффициент усиления Кр такого ЭМУ. Входная мощность управления  .
.
Выходная мощность обмотки якоря

При согласованной нагрузке сопротивление нагрузки  выбирается равным сопротивлению якорной цепи R:
выбирается равным сопротивлению якорной цепи R:  .
.
Магнитный поток и ток возбуждения связаны соотношением

где  — магнитная проводимость магнитной цепи .
— магнитная проводимость магнитной цепи .
Тогда
Таким образом, для повышения Кр следует повысить частоту вращения генератора n и увеличить магнитную проводимость X. Для достижения последнего машину изготовляют с равномерным воздушным зазором малой величины и ненасыщенной магнитной системой.
Уменьшение сопротивлений  и R также ведет к росту
и R также ведет к росту  , но при этом увеличивается постоянная времени цепи
, но при этом увеличивается постоянная времени цепи  , уменьшается быстродействие и добротность ЭМУ.
, уменьшается быстродействие и добротность ЭМУ.
В целях повышения до 50…100 применяют специальные генераторы с шихтованной магнитной системой (не только якорь, но и полюса, станина),что уменьшает влияние вихревых токов в переходных режимах работы. Для улучшения коммутации ЭМУ снабжается дополнительными полюсами, увеличенным число пазов якоря и коллекторных пластин.
Положительные свойства одноступенчатого ЭМУ независимого возбуждения — простота конструкции, надежность в работе, невысокая стоимость. Недостатки — невысокий коэффициент усиления и сравнитель- но большая постоянная времени Т.
Для увеличения Кр применяют каскадные ЭМУ, обычно двухступенчатые ЭМУ.
Двухступенчатые (двухкаскадные) усилители представляют собой каскадное соединение двух генераторов. Обмоткой управления является обмотка возбуждения первого генератора 1. Якорь генератора 1 питает обмотку возбуждения второго генератора 2, цепь якоря которого является выходной цепью, подключаемой к управляемому объекту. Обе машины располагаются в общем корпусе. Общий коэффициент усиления при этом равен произведению коэффициентов усиления отдельных ступеней и может достигать значения Кр = 10000.
Дополнительная теория из учебников по предмету электрические машины тут.
ЭМУ поперечного поля
ЭМУ поперечного поля получили широкое распространение в системах управления не только как усилители мощности, но также в качестве управляемых генераторов, возбудителей и подвозбудителей крупных электрических машин.
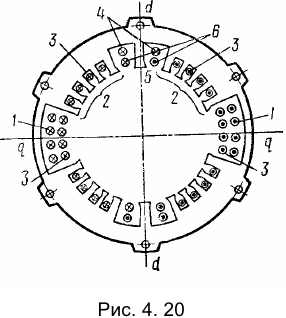
Конструктивно ЭМУ поперечного поля выполняется в виде неявнополюсной машины с двумя полюсами (рис. 4.20) [2]. Неявнополюсной такая конструкция называется потому, что в конструктивном отношении полюса 2 на статоре выражены нечетко. Обмотки управления 1 уложены в большие пазы и создают магнитный поток, действующий по продольной оси. Для улучшения коммутации в зоне рабочих щеток по продольной оси выполняют два больших зуба, которые играют роль добавочных полюсов. В прилегающих к ним увеличенных пазах расположена обмотка добавочных полюсов 6 и поперечная подмагничивающая обмотка 4. Компенсационная обмотка 3 служит для компенсации поля якоря.
В отличии от обычного генератора эта конструкция имеет два комплекта щеток: кроме обычных поперечных щеток, имеются также продольные щетки, причем поперечные щетки замкнуты накоротко или через сопротивление небольшой величины. Приводной двигатель и ЭМУ находятся чаще всего в одном корпусе (при мощностях до 1,5 кВт).
Электрическая схема ЭМУ и диаграмма магнитных потоков показаны на рис. 4.21.
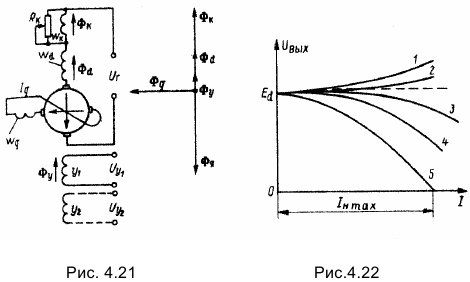
Управляющий сигнал  , поступая в цепь управления, создает магнитный поток
, поступая в цепь управления, создает магнитный поток  , направленный по продольной оси генератора. При вращении якоря магнитный поток наводит в проводниках якоря ЭДС Eq, приложенную к поперечным щеткам. Полярность ЭДС Eq зависит от полярности управляющего сигнала и направления вращения якоря. Под действием ЭДС Eq в проводниках якоря, коммутируемых поперечными щетками, образуется весьма большой ток Iq, так как внутреннее сопротивление короткозамкнутой поперечной цепи мало. Этот ток создает магнитный поток
, направленный по продольной оси генератора. При вращении якоря магнитный поток наводит в проводниках якоря ЭДС Eq, приложенную к поперечным щеткам. Полярность ЭДС Eq зависит от полярности управляющего сигнала и направления вращения якоря. Под действием ЭДС Eq в проводниках якоря, коммутируемых поперечными щетками, образуется весьма большой ток Iq, так как внутреннее сопротивление короткозамкнутой поперечной цепи мало. Этот ток создает магнитный поток  , направленный вдоль поперечной оси ЭМУ. В обычных машинах поток, создаваемый полем якоря невелик, так как магнитная проводимость вдоль поперечной оси в межполюсном промежутке мала. В рассматриваемой неявнополюсной конструкции воздушный зазор по всей окружности практически одинаков и магнитная проводимость вдоль поперечной оси велика. Поэтому ток lq создает значительный магнитный поток
, направленный вдоль поперечной оси ЭМУ. В обычных машинах поток, создаваемый полем якоря невелик, так как магнитная проводимость вдоль поперечной оси в межполюсном промежутке мала. В рассматриваемой неявнополюсной конструкции воздушный зазор по всей окружности практически одинаков и магнитная проводимость вдоль поперечной оси велика. Поэтому ток lq создает значительный магнитный поток 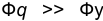 . Поток наводит в проводниках вращающегося якоря ЭДС Ed, приложенную к продольным щеткам. Полярность Ed зависит только от полярности управляющего сигнала и не зависит от направления вращения якоря, что в случае параллельной работы с аккумуляторной батареей является важным свойством ЭМУ.
. Поток наводит в проводниках вращающегося якоря ЭДС Ed, приложенную к продольным щеткам. Полярность Ed зависит только от полярности управляющего сигнала и не зависит от направления вращения якоря, что в случае параллельной работы с аккумуляторной батареей является важным свойством ЭМУ.
При протекании тока нагрузки Iн по рабочей цепи обмотки якоря создается магнитный поток якоря  , направленный по продольной оси навстречу потоку обмотки управления. При этом поток размагничивает магнитную систему, резко уменьшая суммарный магнитный поток по продольной оси. Выходное напряжение может упасть почти до нуля даже при малых токах нагрузки. Чтобы скомпенсировать влияние реакции якоря по продольной оси, в пазах по окружности статора размещают компенсационную обмотку (КО). Она включается последовательно в рабочую цепь нагрузки так, что магнитодвижущая сила (МДС) компенсационной обмотки направлена встречно МДС якоря и создает встречный магнитный поток. При этом для нагруженного ЭМУ магнитный поток по продольной оси
, направленный по продольной оси навстречу потоку обмотки управления. При этом поток размагничивает магнитную систему, резко уменьшая суммарный магнитный поток по продольной оси. Выходное напряжение может упасть почти до нуля даже при малых токах нагрузки. Чтобы скомпенсировать влияние реакции якоря по продольной оси, в пазах по окружности статора размещают компенсационную обмотку (КО). Она включается последовательно в рабочую цепь нагрузки так, что магнитодвижущая сила (МДС) компенсационной обмотки направлена встречно МДС якоря и создает встречный магнитный поток. При этом для нагруженного ЭМУ магнитный поток по продольной оси  можно представить в виде трех составляющих (рис. 4. 21)
можно представить в виде трех составляющих (рис. 4. 21)

где  — магнитный поток, создаваемый током управляющей обмотки;
— магнитный поток, создаваемый током управляющей обмотки;  — магнитный поток продольной реакции якоря;
— магнитный поток продольной реакции якоря;  — магнитный поток, создаваемый КО и обмоткой дополнительных полюсов.
— магнитный поток, создаваемый КО и обмоткой дополнительных полюсов.
Если  , то компенсация полная (критическая) и продольный поток ЭМУ создается только током управления. Если
, то компенсация полная (критическая) и продольный поток ЭМУ создается только током управления. Если  , то в ЭМУ имеет место недокомпенсация потока
, то в ЭМУ имеет место недокомпенсация потока  , а при
, а при  — его перекомпенсация. В первом случае выходной сигнал ЭМУ уменьшается за счет недокомпенсации потока продольной реакции якоря, а во втором -увеличивается за счет его перекомпенсации. В связи с этим влияние КО на свойства ЭМУ можно рассматривать как влияние жесткой внутренней обратной связи: отрицательной — при недокомпенсации потока и положительной — при его перекомпенсации.
— его перекомпенсация. В первом случае выходной сигнал ЭМУ уменьшается за счет недокомпенсации потока продольной реакции якоря, а во втором -увеличивается за счет его перекомпенсации. В связи с этим влияние КО на свойства ЭМУ можно рассматривать как влияние жесткой внутренней обратной связи: отрицательной — при недокомпенсации потока и положительной — при его перекомпенсации.
Поток продольной реакции якоря в десятки и сотни раз больше потока управления , поэтому небольшая неточность в расчете КО может привести к значительному изменению ЭДС  при изменении тока нагрузки. КО обычно выполняется с числом витков несколько большим необходимого, а регулировка степени компенсации
при изменении тока нагрузки. КО обычно выполняется с числом витков несколько большим необходимого, а регулировка степени компенсации  осуществляется с помощью сопротивления Rk, включенного параллельно КО (рис. 4.21). Компенсацию необходимо производить с очень большой точностью, поскольку при перекомпенсации возможно самовозбуждение ЭМУ как генератора последовательного возбуждения и потеря его управляемости, поэтому коэффициент компенсации
осуществляется с помощью сопротивления Rk, включенного параллельно КО (рис. 4.21). Компенсацию необходимо производить с очень большой точностью, поскольку при перекомпенсации возможно самовозбуждение ЭМУ как генератора последовательного возбуждения и потеря его управляемости, поэтому коэффициент компенсации  устанавливают не более 0,95.
устанавливают не более 0,95.
По принципу действия ЭМУ поперечного поля аналогичен каскадному соединению двух генераторов, когда выход одного из них включается на обмотку возбуждения другого. Первому каскаду усиления соответствует сочетание обмотка управления — короткозамкнутая цепь якоря; второму каскаду: короткозамкнутая цепь — рабочая цепь якоря. Соответственно коэффициент усиления ЭМУ поперечного поля равен произведению коэффициентов усиления двух ступеней усиления.
Как видно из выражения (4. 27), коэффициент усиления быстро растет с увеличением частоты вращения (квадратичная зависимость). Поэтому ЭМУ выполняют на повышенные частоты вращения (3000… 8000 об/мин).
Статические характеристики ЭМУ. Свойства ЭМУ в установившемся статическом режиме, как и всякого генератора, характеризуются его внешней характеристикой  , которая определяется формулой
, которая определяется формулой

где  — напряжение на выходе ЭМУ;
— напряжение на выходе ЭМУ;  — ЭДС, действующая по продольной оси ЭМУ; I — ток нагрузки;
— ЭДС, действующая по продольной оси ЭМУ; I — ток нагрузки;  — внутреннее сопротивление ЭМУ по продольной оси, которое образуется суммой сопротивлений обмотки якоря, коммутируемой продольными щетками, переходного контакта коллектор — щетки, обмоток дополнительных полюсов и КО .
— внутреннее сопротивление ЭМУ по продольной оси, которое образуется суммой сопротивлений обмотки якоря, коммутируемой продольными щетками, переходного контакта коллектор — щетки, обмоток дополнительных полюсов и КО .
Внешние характеристики ЭМУ при различной степени компенсации показаны на рис. 4.22. Здесь даны обозначения: 1,2- перекомпенсация; 3 — полная компенсация; 4, 5 — недокомпенсация. При полной компенсации напряжение уменьшается за счет падения напряжения на активном сопротивлении R.. Изменяя степень компенсации ЭМУ, можно получить желаемый вид внешней характеристики. При этом следует иметь в виду, что перекомпенсация может вызвать самовозбуждение ЭМУ и потерю управляемости. В ряде случаев для защиты генератора от перегрузки применяют ЭМУ со значительной недокомпенсацией потока Фя, причем степень компенсации выбирают так, чтобы ток короткого замыкания 1Нтах не превышал допустимого значения (рис. 4.22).
Важными статическими характеристиками ЭМУ являются коэффициенты усиления по мощности Кр, току  и напряжению
и напряжению  . Коэффициент усиления по мощности Кр может достигать больших значений (до
. Коэффициент усиления по мощности Кр может достигать больших значений (до  ), но чаще имеет величину порядка (5. . .10)
), но чаще имеет величину порядка (5. . .10)  . Коэффициент усиления по напряжению сравнительно мал и не превышает нескольких десятков. У ЭМУ малой мощности (до 0,5 кВт) он имеет значения порядка = 2. . .5.
. Коэффициент усиления по напряжению сравнительно мал и не превышает нескольких десятков. У ЭМУ малой мощности (до 0,5 кВт) он имеет значения порядка = 2. . .5.
Динамические характеристики ЭМУ. Динамические свойства ЭМУ определяет передаточная функция. При выводе формулы передаточной функции ЭМУ принимаем, что магнитная система машины не насыщена и магнитный поток скомпенсирован.
Передаточная функция первой ступени усиления ЭМУ аналогична передаточной функции обычного генератора, рассмотренной в п.4.2.4.
Для обмотки управления уравнение напряжений согласно (4.22) di
Под действием тока  в поперечной цепи ЭМУ будет создаваться ЭДС Eq, пропорциональная току аналогично (4.23)
в поперечной цепи ЭМУ будет создаваться ЭДС Eq, пропорциональная току аналогично (4.23)

где  — коэффициент пропорциональности.
— коэффициент пропорциональности.
На основании этих формул получим
где  — коэффициент усиления по напряжению первого каскада (цепь управления — поперечная цепь якоря) аналогично (4.25).
— коэффициент усиления по напряжению первого каскада (цепь управления — поперечная цепь якоря) аналогично (4.25).
Передаточная функция первой ступени усиления ЭМУ

По аналогии с выражением (4. 22) для поперечной цепи ЭМУ
где  — соответственно ток, активное сопротивление и индуктивность поперечной цепи ЭМУ.
— соответственно ток, активное сопротивление и индуктивность поперечной цепи ЭМУ.
Под действием тока  в продольной цепи ЭМУ будет создаваться ЭДС Ed, пропорциональная току :
в продольной цепи ЭМУ будет создаваться ЭДС Ed, пропорциональная току :

где  — коэффициент пропорциональности.
— коэффициент пропорциональности.
Если к ЭМУ подключить сопротивление нагрузки  , то на выходе усилителя напряжение равно
, то на выходе усилителя напряжение равно
я„г + я,
Подставляя в (4.30) выражения для тока и ЭДС Ed,, найденные из (4.31) и (4.32), получаем

где  — постоянная времени поперечной цепи ЭМУ;
— постоянная времени поперечной цепи ЭМУ;
 — коэффициент усиления второго каскада (поперечная цепь — выходная цепь) ЭМУ по напряжению.
— коэффициент усиления второго каскада (поперечная цепь — выходная цепь) ЭМУ по напряжению.
Исключая из выражений (4.29) и (4.33) промежуточную переменную Eq, получаем уравнение динамики ЭМУ, устанавливающее связь между напряжениями на входе Uy и выходе  в виде
в виде

В операторной форме уравнение (4.34) запишется в виде

где  — коэффициент усиления по напряжению.
— коэффициент усиления по напряжению.
На основании (4.35) найдем передаточную функцию ЭМУ:

Из выражения (4.36) видно, что по своим динамическим свойствам ЭМУ представляют собой совокупность двух последовательно соединенных звеньев и, таким образом, подача на управляющую обмотку напряжения  вызовет изменение напряжения
вызовет изменение напряжения  на выходе ЭМУ по апериодическому закону.
на выходе ЭМУ по апериодическому закону.
Однако в реальных условиях на ЭМУ действуют размагничивающие потоки, создаваемые вихревыми токами в стали, которые не учитывались при выводе передаточной функции (4.35), поэтому на выходе переходной процесс носит колебательный характер.
Быстродействие ЭМУ поперечного поля характеризуется двумя постоянными времени Ту и Tq, соответствующими первому и второму каскадам. Постоянная времени цепи управления Ту сравнительно мала (с учетом внутреннего сопротивления источника питания Ту = 0,005. . . 0,025 с), а постоянная времени поперечной цепи Tq значительно превосходит величину Ту (Tq =0,03. . .0,15с). Поэтому основное влияние на инерционность ЭМУ оказывает Tq . Однако это влияние существенно уменьшается, если включить в схему внешнюю обратную связь (рис.4.23). В качестве обмотки обратной связи  используется одна из управляющих обмоток, которая включается таким образом, чтобы магнитный поток, создаваемый током обратной связи
используется одна из управляющих обмоток, которая включается таким образом, чтобы магнитный поток, создаваемый током обратной связи  был направлен навстречу магнитному потоку цепи управления Фу. В результате получаем отрицательную обратную связь (ООС).
был направлен навстречу магнитному потоку цепи управления Фу. В результате получаем отрицательную обратную связь (ООС).
Принципиальной схеме (рис. 4.23) соответствует структурная схема, показанная на рис. 4.24.
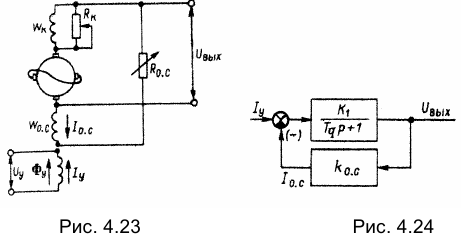
Передаточная функция ЭМУ с учетом ООС
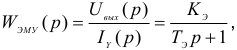
где  — постоянная времени ЭМУ после ввода обратной связи;
— постоянная времени ЭМУ после ввода обратной связи;  — коэффициент усиления ЭМУ, определяемый отношением
— коэффициент усиления ЭМУ, определяемый отношением  коэффициент обратной связи;
коэффициент обратной связи;  — коэффициент усиления с учетом обратной связи.
— коэффициент усиления с учетом обратной связи.
Из выражения (4.37) видно, что ввод отрицательной обратной связи позволяет уменьшить в 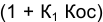 постоянную времени ЭМУ. Следует однако иметь в виду, что величина коэффициента Кос не может выбираться только из условия обеспечения требуемого значения
постоянную времени ЭМУ. Следует однако иметь в виду, что величина коэффициента Кос не может выбираться только из условия обеспечения требуемого значения
постоянной времени Тэ. При этом необходимо учитывать также допустимую перегрузочную способность по току обмотки обратной связи, определяемую коэффициентом перегрузки  максимальный и номинальный токи в обмотке управления. Величина Кп для большинства ЭМУ не превосходит значения 5…8.
максимальный и номинальный токи в обмотке управления. Величина Кп для большинства ЭМУ не превосходит значения 5…8.
Положительными свойствами ЭМУ являются:
- возможность непосредственного подключения к ЭМУ исполнительного двигателя и изменения его скорости в широких пределах;
- малая инерционность и возможность ее уменьшения путем применения специальных схем включения ЭМУ;
- достаточно большой коэффициент усиления по мощности;
- линейная зависимость напряжения на выходе ЭМУ от тока управления;
- возможность суммирования нескольких управляющих сигналов.
Недостатки ЭМУ :
- необходимость принятия специальных мер по улучшению коммутации под продольными и поперечными щетками ЭМУ, что обусловлено большой частотой вращения якоря генератора (до 8000 об/мин);
- нестабильность работы ЭМУ при длительной его эксплуатации, проявляющаяся в различных значениях напряжения на выходе при постоянных значениях частоты вращения якоря и тока управления.
Возможно эти страницы вам будут полезны:
- Предмет электрические машины
- Задачи по электрическим машинам с решениями
- Помощь по электрическим машинам
- Контрольная работа по электрическим машинам
