
Оглавление:
В электрических машинах осуществляется взаимное преобразование механической и электрической энергии. Так, для выработки электрической энергии на электростанциях применяются генераторы — электрические машины, преобразующие механическую энергию в электрическую. Машины, преобразующие электрическую энергию в механическую, называются электродвигателями.
Одна и та же электрическая машина может работать как в режиме генератора, так и в режиме двигателя. Это свойство электрических машин называют обратимостью. Принцип обратимости электрических машин был впервые установлен русским ученым Э. X. Ленцем.
| Если что-то непонятно — вы всегда можете написать мне в WhatsApp и я вам помогу! |
Готовая контрольная работа по предмету электрические машины.

Электрические машины
Использование электрических машин в качестве генераторов и двигателей является их главным назначением. Применение электрических машин в различных отраслях техники может иметь и другие цели. Так, для преобразования тока промышленной частоты в ток более высокой частоты используются электромашинные преобразователи, для усиления мощности электрических сигналов — электромашинные усилители, для регулирования напряжения переменного тока — индукционные регуляторы, для повышения коэффициента мощности потребителей — синхронные компенсаторы.
Очень разнообразно применение электрических машин в устройствах автоматики и вычислительной техники. Здесь электрические машины используются не только в качестве двигателей, но и в качестве тахогенераторов (для преобразования частоты вращения в электрический сигнал), сельсинов, вращающихся трансформаторов (для получения электрических сигналов, пропорциональных углу поворота вала) и т. д.
Различают электрические машины постоянного тока и машины переменного тока.
Машины переменного тока делят на асинхронные и синхронные.
Трансформаторы. Основные сведения. Элементы конструкции
Трансформатор — это электромагнитный аппарат для преобразования электрической энергии одного напряжения в электрическую энергию другого напряжения той же частоты.
Основные элементы конструкции трансформатора: сердечник (магнитопровод) и обмотки, которые помещаются в бак и закрываются крышкой, а также вспомогательные устройства:
Обмотки:
- первичная и вторичная,
- высшего, низшего и среднего напряжения,
- концентрические (однослойные и многослойные, цилиндрические винтовые, спиральные)
- дисковые чередующиеся.
Требования к обмоткам: экономичность по затратам и КПД,
необходимый тепловой режим, механическая (динамическая) прочность, устойчивость к перенапряжениям. Материалы: медь или алюминий с эмалевой или хлопчатобумажной изоляцией
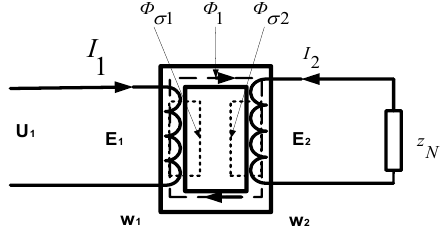
Рис.1.1. Устройство и принцип действия трансформатора
• Трансформаторы:
- понижающие и повышающие,
- двухобмоточные и трехобмоточные,
- сухие и масляные,
- однофазные и трехфазные.
• Основные типы трансформаторов:
- силовые,
- силовые специального назначения,
- индукционные регуляторы,
- автотрансформаторы,
- измерительные трансформаторы тока и напряжения,
- испытательные трансформаторы.
Материал магнитопроводов: электротехническая сталь, магнитодиэлектрики.
- Номинальные величины. Номинальный режим- это режим для которого данный трансформатор спроектирован. Он характеризуется номинальной мощностью, кВА, номинальными первичными и вторичными напряжениями, кВ, и номинальными токами, А, номинальной частотой, Гц.
- Синусоидальность напряжения и тока
- Симметричность трехфазной системы напряжений и токов
- Сердечники трансформаторов: стержневые и броневые. Шихтовка встык и впереплет, материал- листовая электротехническая сталь,
- Обмотки
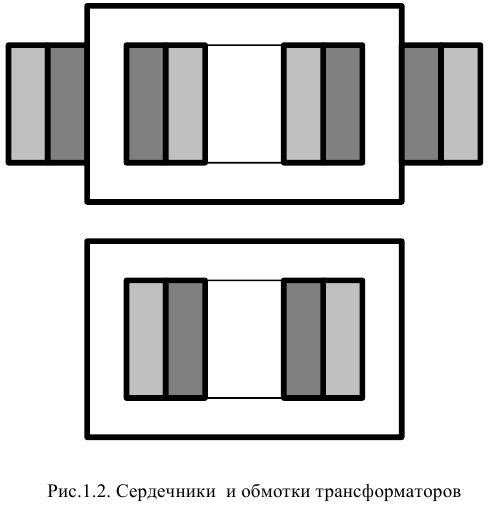
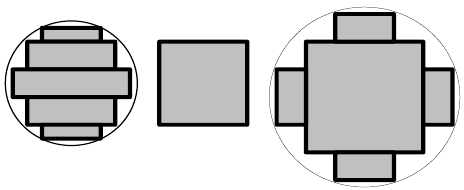
Рис. 1.3. Сердечники трансформаторов
• Баки масляных трансформаторов:
- гладкие (до 20 кВ А),
- трубчатые (до 1800 кВ А),
- с пристроенными радиаторами- охладителями (до 10000 кВ-А), о с принудительной циркуляцией масла и обдувом (более 10000 кВА).
• Крышка бака:
- выводные изоляторы обмоток высшего и низшего напряжения,
- маслорасширитель (более 100 кВ-А),
- выхлопная труба (более 1000 кВ-А),
- газовое реле,
- переключатель числа витков обмотки с приводом,
- кран для заливки масла.
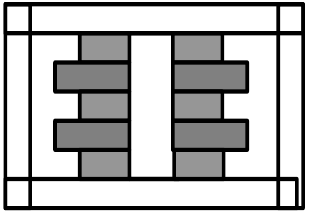
Рис. 1.4. Дисковая чередующаяся обмотка.
• Трансформаторное масло- для охлаждения и изоляции: электрическая прочность 20-35 кВ/мм , температура вспышки 135°С, горюче, взрывоопасно, гигроскопично. Заменитель — совтол.
Электромагнитные процессы при работе трансформатора
• Принцип действия — закон электромагнитной индукции.
• Уравнение МДС (2 закон Кирхгофа для магнитной цепи)
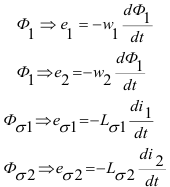
• Магнитные потоки и ЭДС обмоток
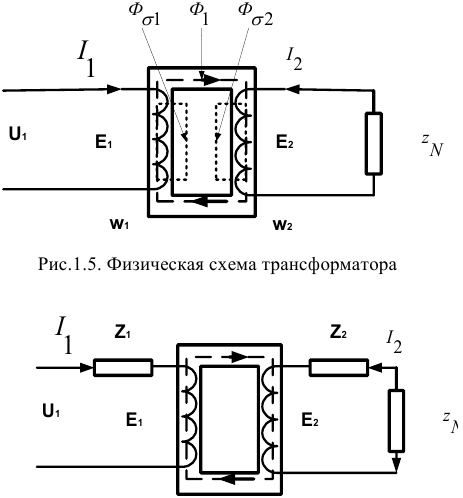
Рис. 1.6. Физическая схема замещения трансформатора
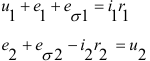
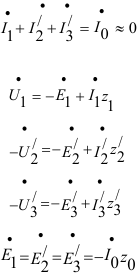
• Уравнения напряжений обмоток на основании 2 закона Кирхгофа
• Уравнения МДС и напряжений обмоток в комплексной форме
• ЭДС обмоток

• Индуктивные сопротивления рассеяния обмоток
• Коэффициент трансформации

• Приведенный трансформатор. Приведенный ток и приведенная ЭДС
Приведенные сопротивления вторичной обмотки из условия неизменности потерь при приведении
• Окончательно уравнения МДС и напряжений обмоток приведенного трансформатора в комплексной форме

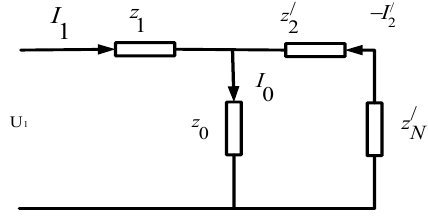
Рис. 1.7. Т-образная схема замещения трансформатора

Ток холостого хода и напряжение короткого замыкания трансформатора  .
.
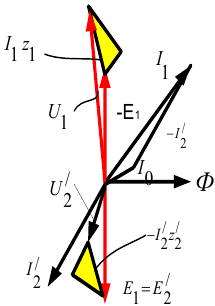
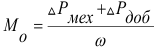
Рис. 1.8. Векторная диаграмма трансформатора
Процессы в трансформаторе при холостом ходе и коротком замыкании Холостой ход однофазного трансформатора
• Эквивалентная схема режима холостого хода
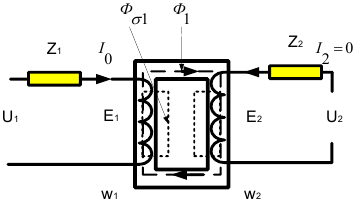
Рис. 1.9. Холостой ход трансформатора
• Простейший трансформатор-это трансформатор без потерь, в котором

Напряжение, ЭДС и магнитный поток
При синусоидальном изменении подводимого напряжения магнитный поток простейшего, а также и реального трансформатора, синусоидален, а кривая намагничивающего тока несинусоидальна и содержит явно выраженные 3-ю и кратные ей гармоники. Несинусоидальную кривую намагничивающего тока заменяют эквивалентной синусоидой, действующее значение которой равно корню квадратному из суммы квадратов действующих значений высших гармоник намагничивающего тока. Эквивалентный
намагничивающий ток представляют в виде вектора, который отстает в простейшем трансформаторе на 90 градусов от приложенного напряжения. Реальный трансформатор для покрытия потерь в стали потребляет еще и активную составляющую тока холостого хода, которая совпадает по фазе с питающим напряжением. Полный ток холостого хода равен
Потери холостого хода состоят из потерь в меди первичной обмотки, которыми в расчете пренебрегают, и потерь в стали на перемагничивание (гистерезис) и на вихревые токи, основных и добавочных. Добавочные потери в стали составляют 15…20% основных потерь и учитываются введением соответствующего коэффициента. Потери холостого хода и основные потери в стали могут быть определены как
Испытательный режим короткого замыкания однофазного трансформатора
• Опыт короткого замыкания проводят при напряжении короткого замыкания  , где
, где  — параметр трансформатора — напряжение короткого замыкания в % от номинального, которому при работе в режиме короткого замыкания соответствуют токи в обмотках, равные номинальным токам.
— параметр трансформатора — напряжение короткого замыкания в % от номинального, которому при работе в режиме короткого замыкания соответствуют токи в обмотках, равные номинальным токам.
• Уравнения
• Схема замещения
• Мощность короткого замыкания равна потерям в обмотках при номинальном токе 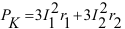 . Потери в стали малы.
. Потери в стали малы.
• Векторная диаграмма
Рис. 1.10. Схема замещения трансформатора в режиме короткого замыкания
Параметры схемы замещения определяют для одной фазы на основании:
1) опыта холостого хода при номинальном напряжении (пренебрегая потерями в первичной обмотке, измеряя подведенную мощность, фазный ток холостого хода и фазные напряжения, первичное и вторичное)

2) и опыта короткого замыкания при номинальном токе (пренебрегая потерями в стали, измеряя первичное фазное напряжение, равное напряжению короткого замыкания, фазные токи в обмотках и потребляемую мощность, которая равна мощности короткого замыкания (сумме потерь в первичной и вторичной обмотках при номинальном токе)).

Для трехфазного трансформатора все величины относятся к одной фазе.
Трансформация трехфазных токов
Магнитные системы трехфазных трансформаторов: независимая, связанная и почти независимая
Рис. 1.11 Магнитные системы трехфазных трансформаторов
Схемы соединения трансформаторов: 
ЭДС трехфазной обмотки.
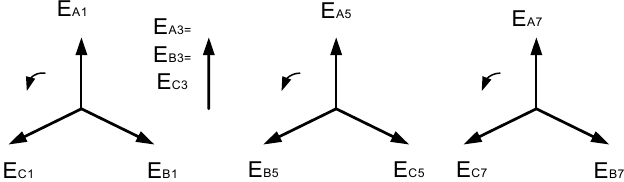
Рис. 1.12. Высшие гармоники фазных ЭДС.
Гармонический состав ЭДС при соединении обмоток Присоединении Y:
• 3 и кратные ей гармоники фазных ЭДС совпадают по фазе, направлены навстречу друг другу и в линейных ЭДС отсутствуют.
• Гармоники порядка  образуют симметричные системы векторов прямой последовательности. Гармоники порядка
образуют симметричные системы векторов прямой последовательности. Гармоники порядка  образуют симметричные системы векторов обратной последовательности. Для них справедливы соотношения:
образуют симметричные системы векторов обратной последовательности. Для них справедливы соотношения:
При соединении  :
:
• 3 и кратные ей гармоники фазных ЭДС совпадают по фазе, действуют в одном направлении и создают 3 и кратные ей гармоники тока. В линейных ЭДС они отсутствуют, т.к. целиком используются на преодоление падения напряжения от этих гармоник.
• Гармоники порядка  образуют симметричные системы векторов прямой и обратной последовательности. Для них справедливы те же соотношения, что и при соединении Y, но:
образуют симметричные системы векторов прямой и обратной последовательности. Для них справедливы те же соотношения, что и при соединении Y, но:
Группы соединения (векторная группа). Группа соединения — это угол сдвига линейных ЭДС первичной и вторичной обмоток, выраженный в часах. Группа соединения зависит от схемы соединения обмоток, направления намотки и маркировки зажимов.
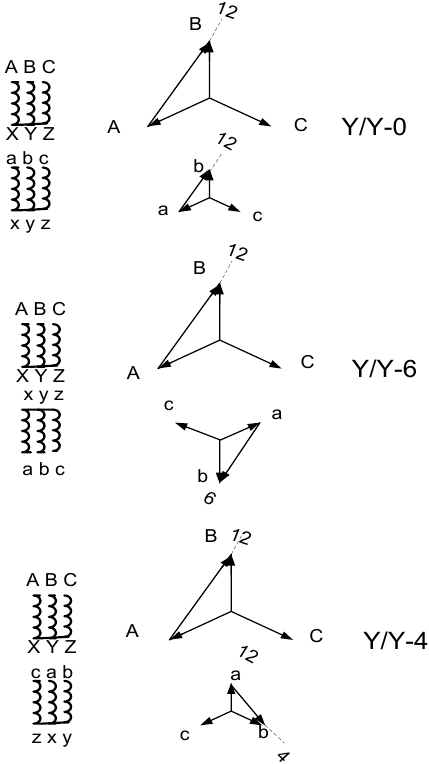
Рис. 1.13.Определение групп соединения
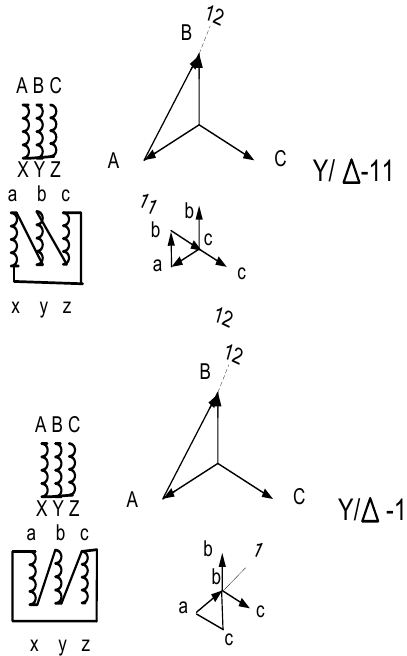
Рис. 1.14. Определение групп соединения
Всего может быть 12 групп. ГОСТ допускает только группы:  ,
,  , а также группы
, а также группы  .
.
Группы  применяются для питания смешанной (силовой и осветительной) нагрузки при мощности трансформаторов до 1800 кВА , при высшем напряжении до 35 кВ , низшем напряжении до 0,4 кВ.
применяются для питания смешанной (силовой и осветительной) нагрузки при мощности трансформаторов до 1800 кВА , при высшем напряжении до 35 кВ , низшем напряжении до 0,4 кВ.
Группа  применяется при мощности трансформаторов до 5600 кВА, при высшем напряжении до 35 кВ, низшем напряжении более 0,4 кВ.
применяется при мощности трансформаторов до 5600 кВА, при высшем напряжении до 35 кВ, низшем напряжении более 0,4 кВ.
Группа  применяется при мощности трансформаторов более 3200кВА, при высшем напряжении более 35 кВ, низшем напряжении не менее 3,ЗкВ.
применяется при мощности трансформаторов более 3200кВА, при высшем напряжении более 35 кВ, низшем напряжении не менее 3,ЗкВ.
Эксплуатационные характеристики
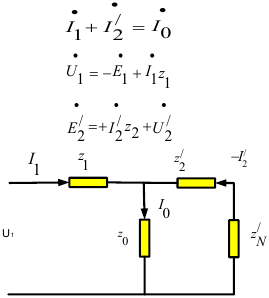
Рис. 1.15. Т-образная схема замещения трансформатора
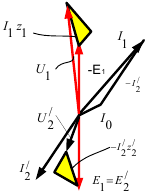
Рис. 1.16. Векторная диаграмма трансформатора
Изменение напряжения трансформатора — это выраженная в % или о.е. от номинального напряжения, арифметическая разность между номинальным напряжением вторичной обмотки  и напряжением
и напряжением  при номинальной нагрузке.
при номинальной нагрузке.
Потери и КПД
Полезная активная мощность
Параллельная работа трансформаторов
Назначение параллельного включения:
- трансформация больших мощностей при ограниченной мощности единичного трансформатора,
- повышение надежности электроснабжения,
- снижение мощности резерва,
- возможность выбора оптимального числа работающих трансформаторов в зависимости от нагрузки.
Условия параллельной работы:
• равенство коэффициентов трансформации при одинаковых первичных и вторичных номинальных напряжениях
• одинаковые группы соединения,
• равенство напряжений короткого замыкания

При выполнении условий векторные диаграммы трансформаторов совпадают и токи складываются арифметически. Нагрузка распределяется пропорционально их номинальной мощности, отсутствуют уравнительные токи. При включении на параллельную работу трансформаторы должны быть сфазированы. Порядок фазировки изучается в лаборатории.
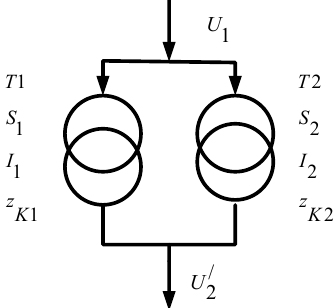
Рис. 1.17. Схема замещения параллельно работающих трансформаторов
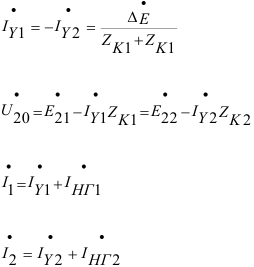
Параллельная работа трансформаторов при различных коэффициентах трансформации при соблюдении двух других условий сопровождается возникновением уравнительного тока.
Трансформатор с меньшим коэффициентом трансформации имеет большую ЭДС вторичной обмотки. Возникает разностная ЭДС, которая и создает в обмотках трансформаторов уравнительные токи. При большой разнице в коэффициентах трансформации величина уравнительных токов может превысить номинальный ток трансформаторов и сделать их параллельную работу невозможной. ГОСТ допускает параллельную работу трансформаторов с коэффициентами трансформации, отличающимися не более, чем на 0,5%, а при коэффициенте трансформации, меньшем 3 — до 1%.
При нагрузке трансформаторов уравнительные токи складываются с токами нагрузки и вызывают при чисто активной или активно-индуктивной нагрузке перегрузку трансформатора с меньшим коэффициентом трансформации и недогрузку трансформатора с большим коэффициентом трансформации.
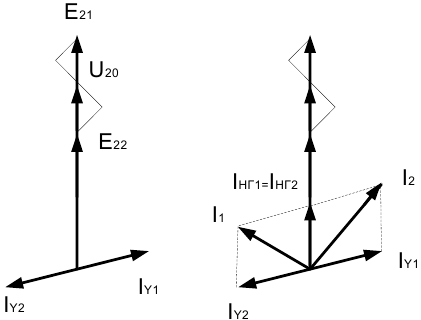
Рис. 1.18. Векторные диаграммы параллельно включенных трансформаторов с различными коэффициентами трансформации при холостом ходе и нагрузке
Параллельная работа трансформаторов при различных группах соединения при соблюдении двух других условий также сопровождается возникновением уравнительного тока, который даже при ближайших группах, например 0 и 11, равен току короткого замыкания трансформатора
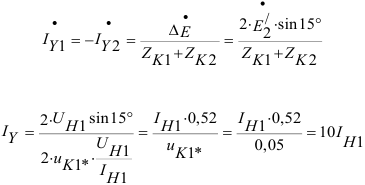
Поэтому параллельная работа трансформаторов с различными группами соединения не допускается.
Параллельная работа трансформаторов при различных напряжениях короткого замыкания при соблюдении двух других условий не сопровождается возникновением уравнительного тока, но нагрузка между трансформаторами распределяется обратно пропорционально их внутренним сопротивлениям, то есть пропорционально номинальной мощности и обратно пропорционально напряжению короткого замыкания.

Допускается параллельная работа трансформаторов, отличающихся величиной напряжения короткого замыкания не более, чем на 10% от среднего значения  , а по номинальной мощности — не более, чем в 3 раза.
, а по номинальной мощности — не более, чем в 3 раза.
Трехобмоточные трансформаторы. Автотрансформаторы
Трехобмоточные трансформаторы выпускаются трехфазными и однофазными. ГОСТ допускает группы соединения  11
11
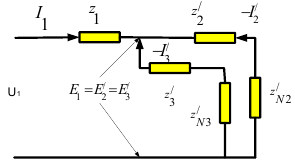
Рис. 1.19.Схема замещения трехобмоточного трансформатора
Параметры трехобмоточного трансформатора определяются из трех опытов КЗ и трех опытов XX. На основании опытов составляется система уравнений для определения параметров трансформатора. Трансформатор характеризуется тремя значениями коэффициента трансформации, тремя значениями тока XX, тремя значениями мощности XX, тремя значениями мощности КЗ, тремя значениями напряжения КЗ.
Автотрансформаторы
Автотрансформатор отличается от обычного трансформатора наличием электрической связи между обмотками.
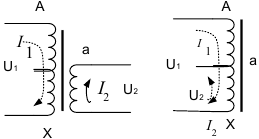
Рис. 1.20. Схема понижающего трансформатора и автотрансформатора
Соотношение между токами обмоток автотрансформатора установим на основании известных соотношений
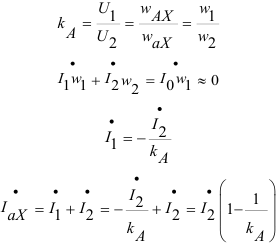
Ток в общей части обмотки автотрансформатора меньше тока вторичной обмотки обычного трансформатора в  раз. Полная (внешняя или проходная) мощность от первичной обмотки ко вторичной в автотрансформаторе передается электромагнитным (электромагнитная, внутренняя, расчетная мощность) и электрическим (электрическая мощность) путями
раз. Полная (внешняя или проходная) мощность от первичной обмотки ко вторичной в автотрансформаторе передается электромагнитным (электромагнитная, внутренняя, расчетная мощность) и электрическим (электрическая мощность) путями 
кА Размеры автотрансформатора зависят только от мощности, передаваемой электромагнитным путем. Поскольку ток на общем участке обмотки меньше тока вторичной обмотки обычного трансформатора в  раз, во столько же раз меньше сечение и расход меди. Поэтому автотрансформатор имеет меньшие размеры и стоимость, чем обычный трансформатор. Сопротивление автотрансформатора, однако, меньше, и это является причиной увеличения ТКЗ. Автотрансформатор отличается большим расходом электроизоляционных материалов.
раз, во столько же раз меньше сечение и расход меди. Поэтому автотрансформатор имеет меньшие размеры и стоимость, чем обычный трансформатор. Сопротивление автотрансформатора, однако, меньше, и это является причиной увеличения ТКЗ. Автотрансформатор отличается большим расходом электроизоляционных материалов.
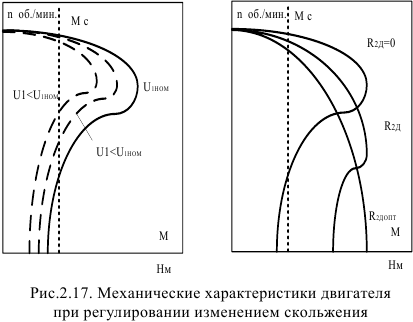
Принцип действия и устройство асинхронных машин. Обмотки электрических машин переменного тока
Режимы работы: двигатель, генератор, электромагнитный тормоз. Элементы конструкции:
• Корпус алюминиевый или стальной , лапы или фланец для крепления, ребра для охлаждения, осевой вентилятор, болт заземления, рым-болт, клеммная коробка.
• Статор — шихтованный из электротехнической стали магнитопровод, запресован в корпус, 3-фазная обмотка статора из медного провода с изоляцией, уложенная в пазах статора, присоединена к зажимам клеммной коробки
• Ротор- шихтованный магнитопровод-сердечник, 3-фазная обмотка из медного провода с изоляцией в пазах ротора, контактные кольца, щетки (машина с фазным ротором) или литая алюминиевая короткозамкнутая обмотка, стержни, короткозамыкающие кольца с вентиляционными лопатками (машина с короткозамкнутым ротором типа “беличья клетка»)
• Вал, подшипники, подшипниковые щиты, подшипниковые крышки, уплотнения, смазка.
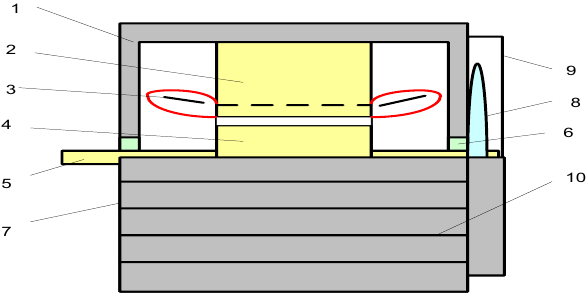
Рис.2.1. Конструкция асинхронного двигателя
Основные соотношения:
• Симметричная трехфазная система токов симметричной трехфазной обмотки статора создает вращающееся магнитное поле с МДС
Частота вращения поля

• ЭДС обмоток статора и ротора (при вращении)
где  — обмоточный коэффициент
— обмоточный коэффициент
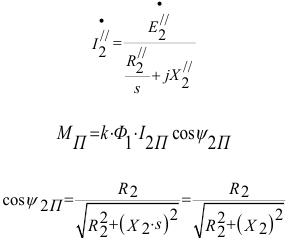
• Ток ротора

• Вращающий момент
• Частота вращения ротора

• Высшие гармоники ЭДС статора и ротора

• Высшие гармоники МДС и потока однофазной и трехфазной обмоток
Частота вращения полей высших гармоник
Обмотки машин переменного тока
Обмотки двухслойные: петлевые и волновые.
Обмотки однослойные: эвольвентная, «в развалку», «цепная», концентрическая.
ЭДС обмоток машин переменного тока
ЭДС машины создается обмоткой, в которой отдельные проводники соединяются в витки, витки — в катушки, катушки — в катушечные группы, а катушечные группы составляют фазную обмотку. ЭДС характеризуется величиной, частотой и формой кривой.
ЭДС проводника, движущегося в магнитном поле, или расположенного в движущемся поле
где:  — индукция в некоторой точке воздушного зазора
— индукция в некоторой точке воздушного зазора  , 1-длина проводника, V-линейная скорость движения проводника в магнитном поле или поля относительно неподвижного проводника.
, 1-длина проводника, V-линейная скорость движения проводника в магнитном поле или поля относительно неподвижного проводника.
Действующее значение ЭДС при синусоидальном распределении индукции в воздушном зазоре (1-я гармоника ЭДС проводника)

ЭДС высших нечетных гармоник ЭДС (четные гармоники отсутствуют)
ЭДС витка с полным (диаметральным) шагом
ЭДС витка с укороченным шагом
ЭДС катушки

Коэффициент укорочения 1-ой гармоники обмоток с укороченным шагом меньше 1. Коэффициент укорочения высших гармоник значительно меньше коэффициента укорочения 1-ой гармоники. ЭДС двухслойных обмоток с укороченным шагом меньше, чем ЭДС обмоток с полным (диаметральным) шагом, но обмотки с укороченным шагом создают лучшую форму кривых ЭДС, подавляя высшие гармоники.
Электромагнитные процессы в трехфазной асинхронной машине при неподвижном роторе
Рассматриваются процессы в асинхронной машине:
• при неподвижном роторе,
• при вращающемся роторе,
• режимы работы,
• вращающие моменты и мощности,
• механические и рабочие характеристики.
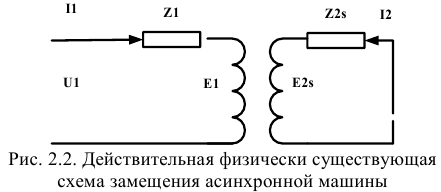
При неподвижном роторе асинхронная машина является трансформатором
• с вращающимся (а не пульсирующим) магнитным потоком,
• с магнитной системой, содержащей воздушный зазор,
• с распределенными (а не сосредоточенными) обмотками статора и ротора,
• с различными числами фаз статора и ротора.
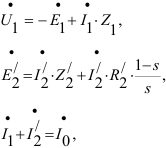
Схема замещения, векторная диаграмма и уравнения напряжений и токов не отличаются от обычного трансформатора
где :  — фазное напряжение. В,
— фазное напряжение. В,
 -ЭДС — статора _ приведенная _ ЭДС _ ротора,В
-ЭДС — статора _ приведенная _ ЭДС _ ротора,В
 ток статора,приведенный ток ротора,ток холостого хода. А,
ток статора,приведенный ток ротора,ток холостого хода. А,
 -полное сопротивление обмотки статора,приведенное полное сопротивление ротора,приведенное сопротивление нагрузки,Ом, s-скольжение,о.е.
-полное сопротивление обмотки статора,приведенное полное сопротивление ротора,приведенное сопротивление нагрузки,Ом, s-скольжение,о.е.
ЭДС обмоток, соответственно, равны
Коэффициент трансформации по ЭДС и приведенная ЭДС ротора
Ток холостого хода и напряжение короткого замыкания такого трансформатора составляют 
Уравнения МДС и токов с учетом коэффициента трансформации по току
Приведенные сопротивления ротора 
Основные режимы работы асинхронного двигателя при неподвижном заторможенном роторе:
• Индукционный регулятор,
• Сдвоенный индукционный регулятор,
• Фазорегулятор.
Электромагнитные процессы в трехфазной асинхронной машине при вращающемся роторе
Уравнения ЭДС и МДС.
Асинхронная машина при вращающемся роторе — это универсальный трансформатор, который преобразует напряжение, ток, число фаз, частоту и род энергии.
Уравнение напряжений первичной обмотки (статора) такого трансформатора
Частота ЭДС и ЭДС вращающегося ротора
Аналогично и для приведенных величин

ЭДС рассеяния ротора

Уравнение э.д.с. ротора:
Скорость вращения МДС ротора относительно ротора  , а относительно неподвижного статора
, а относительно неподвижного статора

Т.е. основная гармоника м.д.с. ротора вращается в пространстве с той же скоростью и в том же направлении, что и м.д.с. статора и они неподвижны друг относительно друга
Неподвижные друг относительно друга МДС  создают общую вращающуюся волну м.д.с.
создают общую вращающуюся волну м.д.с. 

Скорость вращения МДС ротора слагается из скорости вращения самого ротора n и скорости вращения МДС относительно ротора  . В генераторном режиме имеет отрицательное значение, т.е. МДС ротора вращается навстречу вращению ротора.
. В генераторном режиме имеет отрицательное значение, т.е. МДС ротора вращается навстречу вращению ротора.
При этом неизменными остаются величины: угла  токов
токов  и мощности.
и мощности.
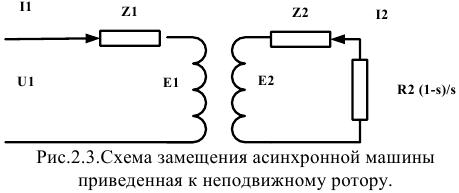
Мощность, выделяемая в добавочном сопротивлении  при протекании тока
при протекании тока  , представляет собой механическую мощность. Это позволяет анализировать вместо вращающегося ротора — неподвижный с добавочным сопротивлением , потребляемая которым мощность равна механической мощности, развиваемой вращающимся ротором.
, представляет собой механическую мощность. Это позволяет анализировать вместо вращающегося ротора — неподвижный с добавочным сопротивлением , потребляемая которым мощность равна механической мощности, развиваемой вращающимся ротором.

Г-образная схема замещения, рис.2.5. Параметры Г- образной схемы замещения:
ток главной цепи 
ток статора, одинаковый для Г-образной и Т-образной схем,
ток намагничивающего контура
Параметры Г-образной схемы замещения

Коэффициент  изменяет параметры главной и намагничивающей цепей и токи по величине и по фазе и не зависит от скольжения.
изменяет параметры главной и намагничивающей цепей и токи по величине и по фазе и не зависит от скольжения.
В приближенных расчетах пренебрегают величиной  и считают
и считают  , что составляет
, что составляет  .
.
В приближенной Г- образной схеме замещения вместо комплексного коэффициента используют — вещественный, а в отдельных случаях не учитывают коэффициент , полагая 
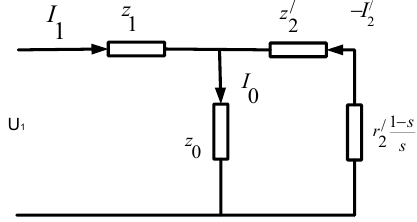
Рис.2.4. Схема замещения асинхронной машины как трансформатора
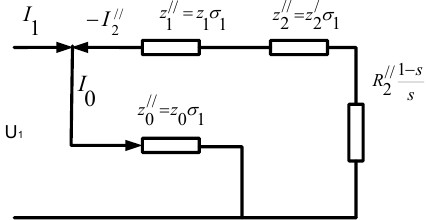
Рис.2.5. Г-образная схема замещения асинхронной машины
Режимы работы асинхронной машины
Двигательный режим, генераторный режим, режим электромагнитного тормоза.
• Двигательный режим. Уравнения. Схема замещения. Векторная диаграмма. Диаграмма преобразования мощности. Потери и КПД
 — ток статора, приведенный ток ротора и ток холостого хода (ток намагничивающего контура),
— ток статора, приведенный ток ротора и ток холостого хода (ток намагничивающего контура),
где:  — фазное напряжение, В,
— фазное напряжение, В,
 -ЭДС статора и приведенная ЭДС ротора,
-ЭДС статора и приведенная ЭДС ротора,
 — полные комплексные сопротивления статора и ротора, активное сопротивление ротора, Ом,
— полные комплексные сопротивления статора и ротора, активное сопротивление ротора, Ом,
s — скольжение, о.е.
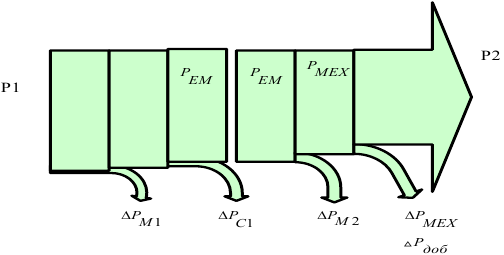
Рис.2.6. Диаграмма преобразования мощности в двигателе
На основании диаграммы преобразования мощности легко устанавливаются соотношения между подведенной и полезной мощностью, КПД, а также соотношение между электромагнитной и механической мощностью

• Генераторный режим. Для перевода работающего асинхронного двигателя в генераторный режим вначале при постоянном напряжении и частоте питающего напряжения разгружают двигатель, снижая момент нагрузки на валу до 0. Ток  уменьшается до величины тока холостого хода, а вектор тока совмещается с током холостого хода
уменьшается до величины тока холостого хода, а вектор тока совмещается с током холостого хода  . Затем с помощью приводного двигателя ускоряют ротор так, что
. Затем с помощью приводного двигателя ускоряют ротор так, что  . Магнитный поток и ток холостого хода не изменяются. Это режим идеального холостого хода. Мощность для покрытия потерь
. Магнитный поток и ток холостого хода не изменяются. Это режим идеального холостого хода. Мощность для покрытия потерь  поступает из сети, для покрытия механических и добавочных потерь
поступает из сети, для покрытия механических и добавочных потерь  поступает от первичного двигателя.
поступает от первичного двигателя.
После этого ротор ускоряют до  и скольжение становится отрицательным. Магнитный поток и ток холостого хода при не изменяются. Это генераторный режим. Изменяется направление вращения ротора относительно основного магнитного потока. Изменяется знак ЭДС
и скольжение становится отрицательным. Магнитный поток и ток холостого хода при не изменяются. Это генераторный режим. Изменяется направление вращения ротора относительно основного магнитного потока. Изменяется знак ЭДС 
Если ток ротора в двигательном режиме разложить по осям и принять, что обе его составляющие имеют положительные значения, то при переходе в генераторный режим при отрицательном скольжении активная составляющая меняет знак:

а вектор тока ротора смещается из 3-го квадранта во 2-ой. С учетом этого векторная диаграмма генератора имеет вид рис. 2.7.
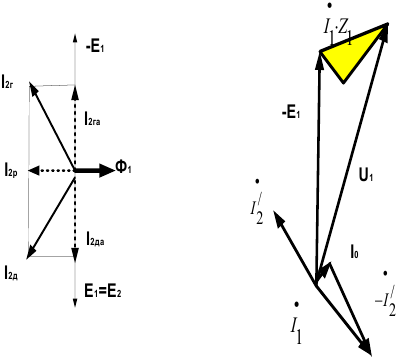
Рис.2.7. Векторная диаграмма асинхронного генератора
Вращающий момент, механические и рабочие характеристики асинхронного двигателя.
Уравнение моментов асинхронного двигателя в установившемся режиме:

где:  — электромагнитный момент, развиваемый двигателем,
— электромагнитный момент, развиваемый двигателем,
 — момент потерь холостого хода,
— момент потерь холостого хода,
 — момент нагрузки на валу двигателя,
— момент нагрузки на валу двигателя,
 — механическая мощность,
— механическая мощность,
 — электромагнитная мощность
— электромагнитная мощность
Потери в обмотке ротора

• Вращающий момент и механическая характеристика
На основании Г-образной схемы замещения асинхронной машины и соотношений потерь в обмотке ротора

и тока ротора
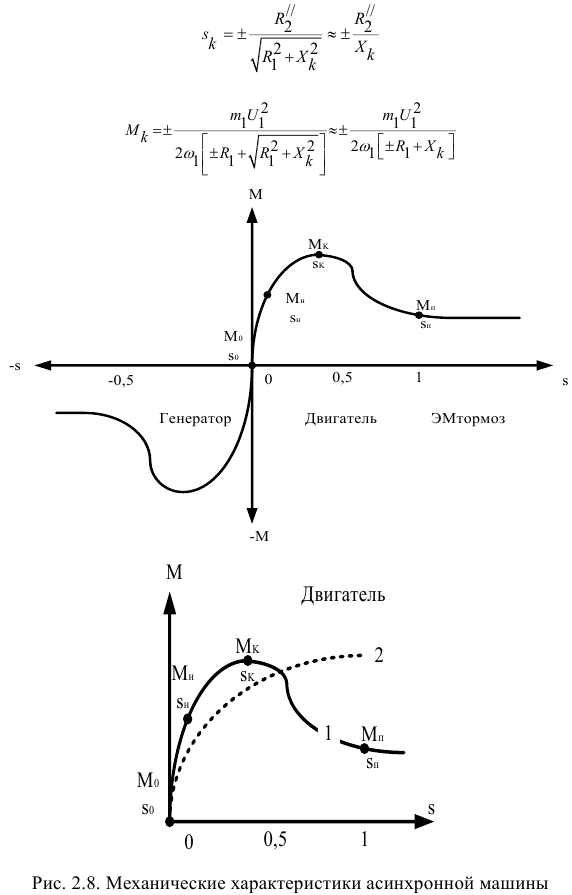
определяется зависимость вращающего электромагнитного момента от скольжения и частоты вращения
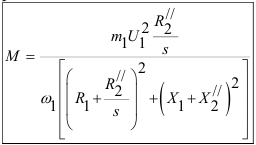
Эта зависимость представляет собой механическую характеристику двигателя. Она приведена на рис.2.8. На графике видны характерные точки: критический (максимальный или опрокидывающий) момент и скольжение, пусковой момент и скольжение, точка холостого хода, номинальная точка соответствующая номинальному моменту и скольжению (номинальной частоте вращения).
Критический (максимальный или опрокидывающий) момент и скольжение  . определяются из условия
. определяются из условия 
Выводы:
Пусковой момент при скольжении 
Из условия максимума пускового момента  полное сопротивление цепи ротора должна быть
полное сопротивление цепи ротора должна быть 
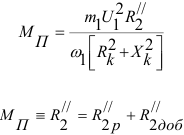
Механическая характеристики асинхронного двигателя при различных значениях 
Расчет механических характеристик по номинальным данным
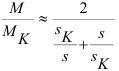
Формула Клосса представляет собой выражение механической характеристики асинхронного двигателя в относительных единицах.
Рабочие характеристики — это зависимости КПД,  , скольжения, вращающего момента от мощности на валу двигателя
, скольжения, вращающего момента от мощности на валу двигателя
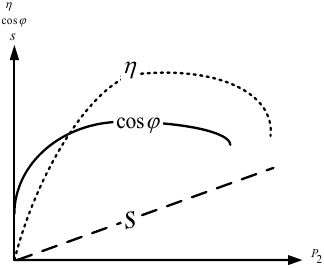
Рис. 2.9. Рабочие характеристики асинхронного двигателя
Лекция 2.7. Пуск асинхронного двигателя
Асинхронный двигатель характеризуется большим пусковым током и малым пусковым моментом. При пуске при скольжении s=l ток ротора, вращающий момент и  соответственно равны:
соответственно равны:
Пуск короткозамкнутого асинхронного двигателя.
Возможен прямой пуск или пуск при пониженном напряжении (реакторный, автотрансформаторный, пуск с переключением обмоток с треугольника в звезду), а также частотный пуск двигателя при питании его от автономного преобразователя частоты.
При включении асинхронного двигателя пусковой ток намного превышает номинальный  , а пусковой момент невелик
, а пусковой момент невелик 
Прямой пуск возможен при выполнении условий:

Пуск при пониженном напряжении следует применять, если 
Коэффициент снижения напряжения  .
.
Реакторный пуск

После окончания пуска пусковой реактор закорачивается.
Автотрансформаторный пуск при применении автотрансформатора с коэффициентом трансформации

После окончания пуска пусковой автотрансформатор выводится
Пуск с переключением с треугольника на звезду возможен, если двигатель нормально работает при соединении в треугольник. Фазное напряжение при переключении на звезду снижается в  раз, а сопротивление увеличивается в
раз, а сопротивление увеличивается в  раз:
раз: 
Частотный пуск с плавным повышением частоты и напряжения может быть выполнен при включении двигателя через статический или электромашинный преобразователь частоты
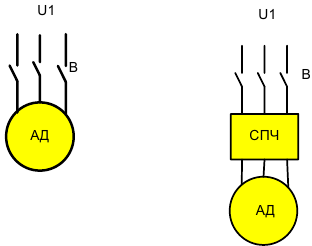
Рис.2.10. Прямой и частотный пуск асинхронного двигателя
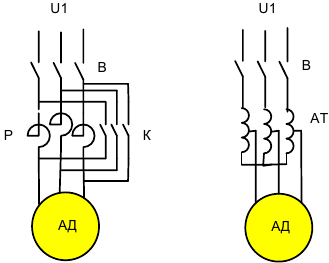
Рис.2.11. Пуск асинхронного двигателя при пониженном напряжении (реакторный и автотрансформаторный)
Пуск асинхронного двигателя с фазным ротором
Для уменьшения пускового тока и увеличения пускового момента в цепь ротора асинхронного двигателя с фазным ротором включают пусковой реостат, состоящий из нескольких ступеней сопротивления. Схема включения реостата аналогична включению регулировочного реостата. Сопротивления ступеней пускового реостата и момент их переключения должны обеспечить поддержание пускового момента в процессе разгона в некоторых пределах от максимального до минимального значения.
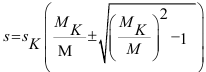
Для расчета используется упрощенная формула Клосса
Откуда путем решения квадратного уравнения по известным величинам критического скольжения, критического и текущего значения моментов определяется скольжение
и зависимость критического скольжения от сопротивления
Рис.2.12. Схема включения реостата в цепь ротора и пусковые характеристики при реостатном пуске
Максимальный пусковой момент (точка 1) при неподвижном роторе при скольжении  равен критическому моменту. Он может быть получен, если в цепь ротора ввести добавочное сопротивление
равен критическому моменту. Он может быть получен, если в цепь ротора ввести добавочное сопротивление
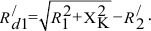
При разгоне двигателя с этим сопротивлением в цепи ротора до скольжения  (точка 2) пусковой ток спадает, а пусковой момент снижается до минимального значения
(точка 2) пусковой ток спадает, а пусковой момент снижается до минимального значения  . Затем закорачивается первая ступень пускового реостата при скольжении
. Затем закорачивается первая ступень пускового реостата при скольжении
После закорачивания 1 ступени вращающий момент опять достигает максимального значения (точка 3). Этому соответствует критическое скольжение на новой механической характеристике
и добавочное сопротивление в цепи ротора
При разгоне двигателя с этим сопротивлением в цепи ротора до скольжения  (точка 4) пусковой ток опять спадает, а пусковой момент снижается до минимального значения
(точка 4) пусковой ток опять спадает, а пусковой момент снижается до минимального значения  Затем закорачивют вторую ступень пускового реостата при скольжении
Затем закорачивют вторую ступень пускового реостата при скольжении
и добавочное сопротивление в цепи ротора

Если скольжение равно критическому скольжению естественной механической характеристики  , то эта ступень реостата последняя. Далее разгон
, то эта ступень реостата последняя. Далее разгон
продолжается по естественной характеристике до точки 6, соответствующей моменту нагрузки на валу  .
.
Регулирование частоты вращения асинхронного двигателя с короткозамкнутым ротором
Регулирование возможно: изменением числа полюсов, изменением частоты подведенного напряжения и изменением скольжения.
Регулирование изменением числа полюсов осуществляется в специальных многоскоростных (двух-, трех-, четырехскоростных) асинхронных двигателях, которые могут быть выполнены однообмоточными и двухобмоточными. Принцип переключения числа полюсов поясняется рисунками
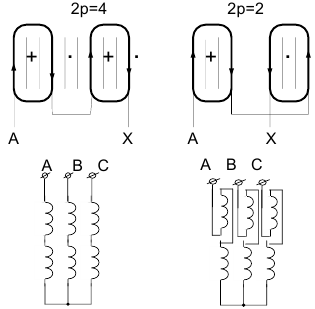
Рис.2.13. Переключение полюсов в схеме Y-Y при постоянной мощности.
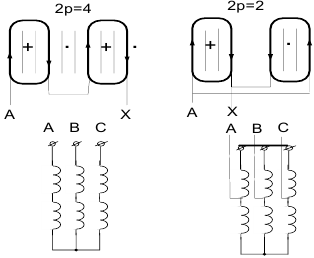
Рис. 2.14.Переключение полюсов в схеме Y-YY при постоянном моменте.
При переключении числа полюсов изменяется также напряжение  , число витков
, число витков  , величины электромагнитных нагрузок (индукция В, ток I, и обмоточные коэффициенты). Вращающий момент асинхронного двигателя при переключении полюсов изменяется пропорционально индукции
, величины электромагнитных нагрузок (индукция В, ток I, и обмоточные коэффициенты). Вращающий момент асинхронного двигателя при переключении полюсов изменяется пропорционально индукции

На основании выражения

получаем
откуда
В схеме Y-Y с переключение полюсов, например,  переключение осуществляется при постоянной мощности (крановая нагрузка -механизм подъема)
переключение осуществляется при постоянной мощности (крановая нагрузка -механизм подъема)

В схеме Y-YY — переключение осуществляется при постоянном моменте нагрузки (механизм передвижения транспортного средства, крана)

Механические характеристики двухскоростного двигателя при переключении полюсов при постоянной мощности и при постоянном моменте приведены на рис.2.15.
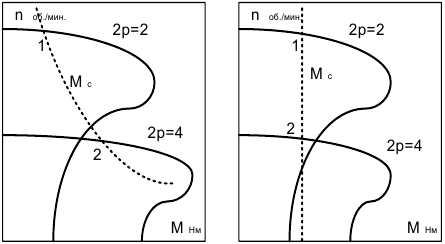
Рис. 2.15. Механические характеристики двухскоростного двигателя при переключении полюсов при постоянной мощности и при постоянном моменте.
Регулирование изменением частоты подведенного напряжения.
При регулировании изменением частоты  для получения наилучших техникоэкономических показателей асинхронного двигателя напряжение регулируется по закону Костенко:
для получения наилучших техникоэкономических показателей асинхронного двигателя напряжение регулируется по закону Костенко:
при котором поддерживается постоянным магнитный поток асинхронного двигателя, и остаются постоянными высокие энергоэкономические показатели двигателя (КПД и cos).
При постоянном моменте  этот закон принимает вид
этот закон принимает вид
При постоянной мощности  закон регулирования напряжения
закон регулирования напряжения 
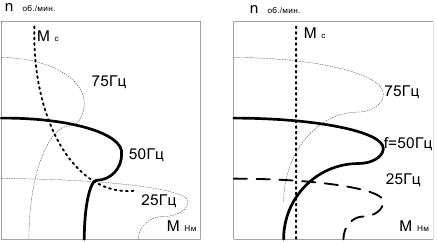
Рис.2.16. Механические характеристики двигателя при частотном регулировании при постоянной мощности и при постоянном моменте.
Регулирование изменением скольжения возможно изменением сопротивления цепи ротора или изменением подводимого напряжения, при котором изменяется наклон механических характеристик двигателя. Скольжение изменяется обратно пропорционально квадрату напряжения.
При регулировании изменением подведенного напряжения скольжение изменяется обратно пропорционально квадрату напряжения

где

При регулировании изменением активного сопротивления в цепи ротора при постоянном моменте
Таким образом, скольжение изменяется пропорционально сопротивлению цепи ротора  и в таком же соотношении с увеличением скольжения возрастают потери
и в таком же соотношении с увеличением скольжения возрастают потери 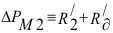
скольжение и снижение частоты вращения пропорционально сопротивлению в цепи ротора. Пропорционально снижению скорости (увеличению скольжения) возрастают потери и снижается КПД. Диапазон регулирования зависит от нагрузки на валу. Скорость холостого хода двигателя (при М=0) не регулируется.
Характеристика способов регулирования частоты вращения
Регулирование изменением числа полюсов и изменением частоты питающего напряжения осуществляется без потерь — экономично.
Регулирование изменением скольжения сопровождается увеличением потерь. Чем больше скольжение, тем больше потери. Частота вращения холостого хода не регулируется, диапазон регулирования зависит от нагрузки, возможна неустойчивая работа, регулирование — вниз от номинальной частоты.
Регулирование изменением числа полюсов — ступенчатое (2,3,4 ступени), может осуществляться только в специальных многоскоростных двигателях.
Регулирование изменением частоты питающего напряжения — плавное, в широком диапазоне, особенно совместно с системой автоматического регулирования, вверх и вниз от номинальной частоты. Источник питания регулируемый СПЧ — дорогое устройство.
Синхронные машины. Устройство и принцип действия. Возбуждение
Режимы работы: режим синхронного генератора, режим синхронного двигателя и режим синхронного компенсатора. Основное применение: синхронные генераторы электрических станций, крупные синхронные двигатели промышленных потребителей и синхронные компенсаторы крупных подстанций энергосистемы.
Явнополюсные и неявнополюсные конструкции синхронных машин. Неявнополюсный синхронный генератор — турбогенератор (неявнополюсный ротор) 
Явнополюсный синхронный генератор (гидрогенератор, дизель-генератор) 
Турбогенераторы и гидрогенераторы. Генераторы гидроаккумулирующих электростанций.
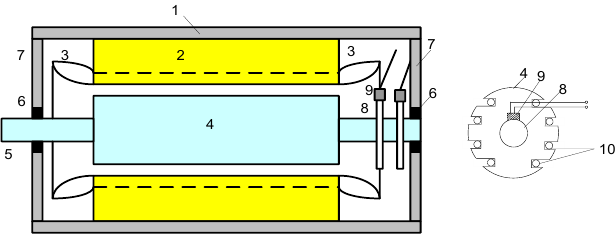
Рис. 3.1. Конструкция турбогенератора и неявнополюсного ротора: 1- корпус, 2-шихтованный магнитопровод статора, 3-трехфазная силовая обмотка статора (якоря), 4-неявнополюсный кованый ротор турбогенератора с обмоткой возбуждения постоянного тока 10 (обмотанная часть ротора, зубцы и пазы ротора, большой зубец ротора), 5-вал ротора, 6-подшипники, установленные в подшипниковых щитах 7, 8- контактные кольца ротора, 9-электрические щетки, другие элементы: возбудитель, бандажные кольца ротора, крепление обмотки статора, коробка выводов, лапы или фланец для крепления машины, успокоительная обмотка (стержни, короткозамыкающие кольца), система охлаждения
Рис. 3.2. Конструкция явнополюсного ротора (шихтованный полюсный сердечник с полюсным наконечником и Т-образным хвостовиком), обмотка возбуждения, успокоительная обмотка, стяжные шпильки, обод ротора
Рабочий процесс в синхронном генераторе при возбуждении вращающегося ротора постоянным током возбуждения: 
МДС обмотки возбуждения на 1 полюс  .
.
МДС трехфазной обмотки якоря (вращающаяся МДС реакции якоря) 
Частота вращения ротора (индуктора) и частота вращения поля
ЭДС обмотки якоря от вращающегося магнитного поля  ,
,
где:  -число витков ОВ на полюс,
-число витков ОВ на полюс,  — число витков на пару полюсов.
— число витков на пару полюсов.
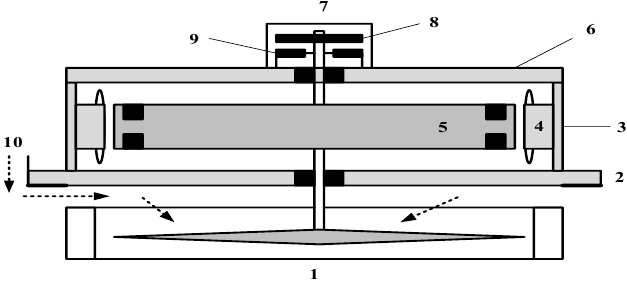
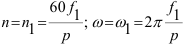
Рис. 3.3.Конструктивная схема гидроагрегата с реактивной гидротурбиной и синхронным гидрогенератором: 1 -гидротурбина, 2 — нижняя крестовина гидрогенератора с нижним направляющим подшипником, 3 — корпус гидрогенератора, 4 — статор гидрогенератора с трехфазной обмоткой якоря, 5 — ротор (индуктор) гидрогенератора с с обмоткой возбуждения постоянного тока и контактными кольцами, 6 — верхняя крестовина гидрогенератора с верхним направляющим подшипником, 7 — корпус подпятника турбогенератора с масляной ванной и системой охлаждения масла, 8 — опорная пята, укрепленная на валу, 9 — подпятник, 10 — направляющий аппарат гидротурбины и рабочий поток воды.
Рис. 3.4.Заполнение паза статора и ротора
Охлаждение: при мощности до 30 МВА применяется замкнутая система косвенного воздушного охлаждения,
до 150 МВА — замкнутая система косвенного водородного охлаждения с избыточным давлением 0,05 атм,
до 300 МВА- замкнутая система косвенного водородного охлаждения с избыточным давлением 3-5 атм,
до 500 МВА- замкнутая система косвенного водородного охлаждения с избыточным давлением 3-5 атм с непосредственным внутренним охлаждением проводников статора водой или водородом,
более 500МВА — замкнутая система косвенного водородного охлаждения с избыточным давлением 3-5 атм с непосредственным внутренним охлаждением проводников статора и ротора водой или водородом.
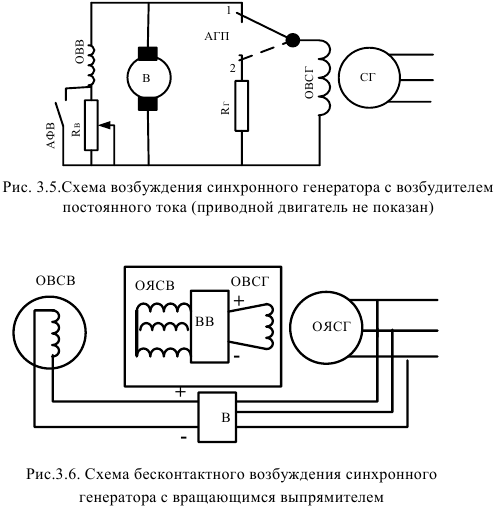
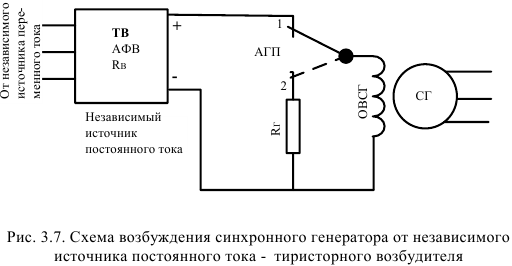
Возбуждение синхронных машин
Функции системы возбуждения: питание обмотки возбуждения постоянным током, регулирование тока возбуждения и напряжения на якоре генератора или реактивной мощности, автоматическая форсировка возбуждения АФВ при удаленных коротких замыканиях и снижении напряжения на зажимах генератора, автоматическое гашение поля АГП при внутренних коротких замыканиях.
Схемы возбуждения:
Электромагнитные процессы при холостом ходе и нагрузке. Реакция якоря
Магнитное поле (магнитный поток возбуждения  ) синхронной машины при холостом ходе создается индуктором (обмоткой возбуждения) и проходит по магнитной цепи: полюсный сердечник, полюсный наконечник ротора (индуктора), воздушный зазор между статором и ротором, зубцовая зона статора, спинка (ярмо) статора, зубцовая зона статора, воздушный зазор, полюсный наконечник ротора, полюсный сердечник.
) синхронной машины при холостом ходе создается индуктором (обмоткой возбуждения) и проходит по магнитной цепи: полюсный сердечник, полюсный наконечник ротора (индуктора), воздушный зазор между статором и ротором, зубцовая зона статора, спинка (ярмо) статора, зубцовая зона статора, воздушный зазор, полюсный наконечник ротора, полюсный сердечник.
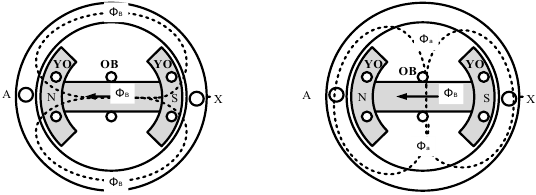
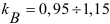
Рис.3.8. Магнитное поле синхронной машины при холостом ходе и нагрузке
Воздушный зазор синхронной машины вдоль окружности якоря — неравномерен, и магнитное сопротивление прохождению магнитного потока различно на различных участках магнитной цепи (продольная и поперечная оси машины). Поэтому индукция в зазоре распределяется несинусоидально. При расчете машины важно выделить действие основной гармоники кривой магнитного поля. Отношение амплитуды основной гармоники индукции от поля возбуждения к максимальному значению несинусоидальной кривой -это коэффициент формы поля возбуждения

Его величина зависит от: 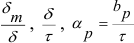 . При
. При 
При неявнополюсном роторе близкая к синусоидальной форма кривой индукции достигается выбором соотношений длин обмотанной ОС и необмотанной  частей ротора. Коэффициент формы поля возбуждения
частей ротора. Коэффициент формы поля возбуждения

При 
При нагрузке машины трехфазная система токов статора (якоря) создает вращающееся магнитное поле реакции якоря (магнитный поток реакции якоря  ), которое вращается синхронно с ротором, взаимодействует с полем возбуждения и создает единое магнитное поле машины. Характер взаимодействия полей зависит от характера нагрузки.
), которое вращается синхронно с ротором, взаимодействует с полем возбуждения и создает единое магнитное поле машины. Характер взаимодействия полей зависит от характера нагрузки.
При чисто активной нагрузке ЭДС и ток якоря совпадают по фазе, ЭДС и ток имеют максимальное значение в витках под серединой полюса, а МДС поля реакции якоря направлена по поперечной оси машины и является поперечной по отношению к МДС поля возбуждения.
При индуктивной нагрузке ток отстает от ЭДС на 90 град во времени, а МДС и магнитный поток поля реакции якоря отстает от МДС и магнитного потока поля возбуждения на 180 град в пространстве и направлена вдоль продольной оси машины в направлении, противоположном МДС поля возбуждения, т.е. размагничивает машину. Реакция якоря характеризуется как продольно — размагничивающая.
При емкостной нагрузке ток якоря опережает ЭДС на 90 град во времени, а МДС и поток поля реакции якоря совпадает с МДС и потоком поля возбуждения в пространстве и направлена вдоль продольной оси машины в том же направлении, что и МДС поля возбуждения, т.е. подмагничивает машину. Реакция якоря характеризуется как продольная подмагничивающая. В общем случае активно-индуктивной или активно-емкостной нагрузки ток и созданную им МДС вращающегося магнитного поля раскладывают на две составляющие: продольную  и поперечную
и поперечную 

А процесс рассматривают отдельно по продольной оси машины d и поперечной оси q.
Магнитное поле синхронной машины при нагрузке машины состоит из поля возбуждения, созданного индуктором, и поля реакции якоря. Индукция в зазоре так же, как и при холостом ходе, несинусоидальна. Отношение амплитуды основной гармоники индукции от поля реакции якоря к максимальному значению несинусоидальной кривой — это коэффициент формы поля реакции якоря.
Коэффициенты формы поля продольной и поперечной реакции якоря

зависят от отношения геометрических размеров машины:  .
.
МДС продольной и поперечной реакции якоря проводят свои магнитные потоки по продольной и поперечной осям  , а эти потоки наводят в обмотке якоря (статора) ЭДС продольной реакции якоря
, а эти потоки наводят в обмотке якоря (статора) ЭДС продольной реакции якоря

и ЭДС поперечной реакции якоря

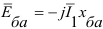
Векторные диаграммы магнитных потоков и ЭДС неявнополюсной и явнополюсной машин поясняют происходящие процессы.
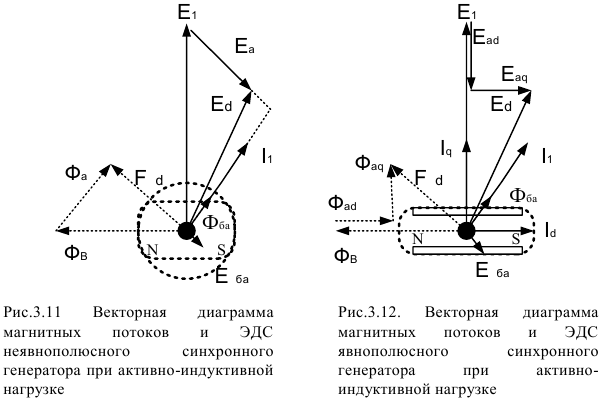
Результирующий магнитный поток в воздушном зазоре

определяет степень насыщения магнитной цепи машины и положение рабочей точки на кривой намагничивания ее магнитной цепи.
Аналогично результирующая ЭДС от результирующего магнитного потока косвенно определяет степень насыщения машины

Для удобства анализа ЭДС продольной и поперечной реакции якоря явнополюсной машины заменяют произведениями составляющих токов на некоторые индуктивные сопротивления, которые называют сопротивлениями продольной и поперечной реакции якоря,

Величина этих сопротивлений зависит от геометрических размеров и обмоточных данных машины

ЭДС поля рассеяния представляют тоже в виде произведения тока якоря на некоторое индуктивное сопротивление, которое называют индуктивным сопротивлением рассеяния
Результирующие синхронные ЭДС
где  — индуктивное сопротивление рассеяния обмотки статора, которое состоит из пазового рассеяния, рассеяния лобовых частей, дифференциального рассеяния,
— индуктивное сопротивление рассеяния обмотки статора, которое состоит из пазового рассеяния, рассеяния лобовых частей, дифференциального рассеяния,
 — продольное и поперечное индуктивные синхронные сопротивления. Для неявнополюсной машины эти соотношения принимают вид:
— продольное и поперечное индуктивные синхронные сопротивления. Для неявнополюсной машины эти соотношения принимают вид:
Лекция 3.3.Векторные диаграммы синхронных генераторов
Неявнополюсный СГ. Уравнение напряжений обмотки якоря на основании закона Кирхгофа для контура
где  — индуктивное синхронное сопротивление якоря машины.
— индуктивное синхронное сопротивление якоря машины.

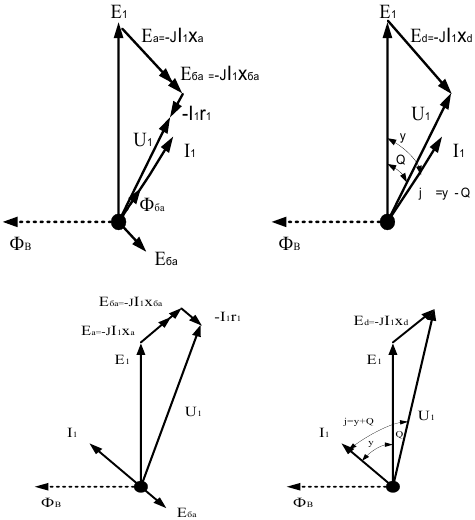
Рис.3.13. Векторные диаграммы неявнополюсного синхронного генератора при активно-индуктивной и активно-емкостной нагрузке
Явнополюсный СГ. На основании закона Кирхгофа для контура уравнение напряжений
При 
где  — продольное индуктивное синхронное сопротивление якоря машины,
— продольное индуктивное синхронное сопротивление якоря машины,  — поперечное индуктивное синхронное сопротивление якоря машины уравнение напряжений имеет вид
— поперечное индуктивное синхронное сопротивление якоря машины уравнение напряжений имеет вид

причем величиной падения напряжения в активном сопротивлении обмотки якоря по сравнению с другими векторами настолько мала, что ею часто пренебрегают.
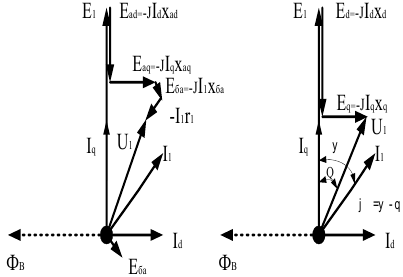
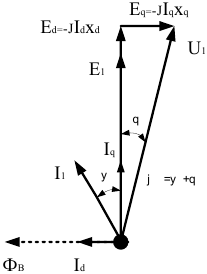
Рис.3.14. Векторные диаграммы явнополюсного синхронного генератора при активно-индуктивной и активно-емкостной нагрузке
Характеристики синхронного генератора при работе на автономную нагрузку
Характеристики синхронного генератора при работе на автономную нагрузку — это: XXX — характеристика холостого хода, ХКЗ — характеристика короткого замыкания, ВХ — внешняя характеристика, РХ — регулировочная характеристика, ИНХ — индукционная нагрузочная характеристика.
Характеристики строятся расчетным путем или снимаются экспериментально при постоянной номинальной частоте, постоянной номинальной частоте вращения и  в установившемся режиме при симметричной нагрузке.
в установившемся режиме при симметричной нагрузке.
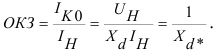
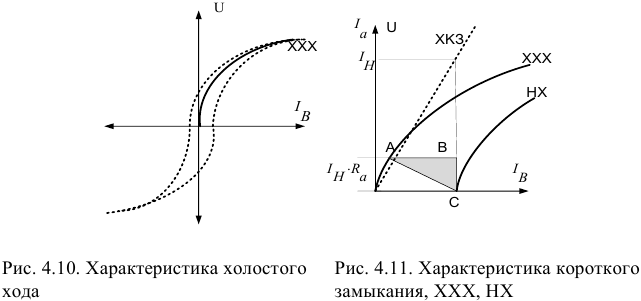
XXX это характеристика намагничивания машины, т.е. зависимость ЭДС генератора от тока или МДС возбуждения в именованных или относительных единицах при разомкнутой цепи статора (якоря) и токе якоря  . Часто в расчетах пользуются нормальными XXX, а также прямолинейными расчетными характеристиками, насыщенной или ненасыщенной. Нормальная XXX — это усредненная XXX ряда машин в о.е. Ненасыщенная прямолинейная характеристика холостого хода XXX-1 проводится через начало координат как касательная к начальной части XXX. Насыщенная прямолинейная характеристика ХХХ-2 проходит через начало координат и точку С на XXX с ординатой, равной ЭДС от результирующего магнитного потока в воздушном зазоре
. Часто в расчетах пользуются нормальными XXX, а также прямолинейными расчетными характеристиками, насыщенной или ненасыщенной. Нормальная XXX — это усредненная XXX ряда машин в о.е. Ненасыщенная прямолинейная характеристика холостого хода XXX-1 проводится через начало координат как касательная к начальной части XXX. Насыщенная прямолинейная характеристика ХХХ-2 проходит через начало координат и точку С на XXX с ординатой, равной ЭДС от результирующего магнитного потока в воздушном зазоре 
ХКЗ — это зависимость тока якоря от тока или МДС возбуждения в именованных или относительных единицах при замкнутой накоротко обмотке якоря и  . В режиме КЗ
. В режиме КЗ  . Ток якоря отстает от ЭДС на
. Ток якоря отстает от ЭДС на  и является продольно — размагничивающим. ЭДС от результирующего магнитного потока
и является продольно — размагничивающим. ЭДС от результирующего магнитного потока

невелика и магнитная цепь машины не насыщена, т.е. ХКЗ — прямая линия, проходящая через начало координат и точку с координатами  , где
, где  — ток короткого замыкания при токе возбуждения
— ток короткого замыкания при токе возбуждения  , которому в режиме XX соответствует номинальное напряжение.
, которому в режиме XX соответствует номинальное напряжение.
На основании XXX и ХКЗ могут быть определены некоторые параметры генератора: синхронное сопротивление турбогенератора или продольное синхронное сопротивление явнополюсного генератора и ОКЗ (отношение короткого замыкания).
Синхронные: ненасыщенное  насыщенное
насыщенное  сопротивления и коэффициент насыщения магнитной цепи машины
сопротивления и коэффициент насыщения магнитной цепи машины

Отношение короткого замыкания (ОКЗ) — это отношение тока установившегося тока короткого замыкания при токе возбуждения, которому в режиме холостого хода соответствует номинальное напряжение на зажимах генератора
Оно невелико и для турбогенератора составляет 0,4-0,8, для гидрогенератора — 0,6-1,7 о.е. То есть этот ТКЗ невелик, что объясняется размагничивающим действием ТКЗ и небольшой величиной тока возбуждения. ОКЗ и  определяют предельную нагрузку генератора по условиям статической устойчивости при параллельной работе генератора в системе. Чем больше ОКЗ (и меньше ), тем большую нагрузку может взять на себя генератор при параллельной работе. А это может быть достигнуто при конструировании путем увеличения воздушного зазора машины. Но такая машина получается дороже из-за необходимости усиления обмотки возбуждения и увеличения габаритов.
определяют предельную нагрузку генератора по условиям статической устойчивости при параллельной работе генератора в системе. Чем больше ОКЗ (и меньше ), тем большую нагрузку может взять на себя генератор при параллельной работе. А это может быть достигнуто при конструировании путем увеличения воздушного зазора машины. Но такая машина получается дороже из-за необходимости усиления обмотки возбуждения и увеличения габаритов.
Рис.3.15.Определение ОКЗ синхронного генератора
ВХ — это зависимость напряжения на зажимах генератора от тока якоря (нагрузки) при постоянном токе возбуждения, равном номинальному, т.е. такому, которому при номинальном токе якоря и  соответствует номинальное напряжение на зажимах генератора. Вид характеристик, падающая или восходящая с увеличением тока якоря, зависит от характера нагрузки (активно-индуктивная, активно-емкостная или активная). Это поясняется векторными диаграммами.
соответствует номинальное напряжение на зажимах генератора. Вид характеристик, падающая или восходящая с увеличением тока якоря, зависит от характера нагрузки (активно-индуктивная, активно-емкостная или активная). Это поясняется векторными диаграммами.
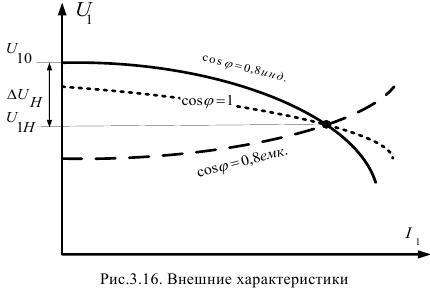
Номинальное изменение напряжения синхронного генератора  — это изменение напряжения при изменении нагрузки генератора от номинальной
— это изменение напряжения при изменении нагрузки генератора от номинальной  до 0 при неизменном токе возбуждения, равном номинальному току
до 0 при неизменном токе возбуждения, равном номинальному току 
Величина  составляет 25-35%, причем для турбогенераторов его величина больше, чем для гидрогенераторов.
составляет 25-35%, причем для турбогенераторов его величина больше, чем для гидрогенераторов.
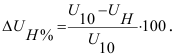
РХ — это зависимость тока возбуждения генератора от тока якоря при постоянном напряжении на зажимах и  . РХ показывает, и как нужно регулировать ток возбуждения при изменении тока нагрузки генератора, чтобы напряжение на зажимах оставалось неизменным. Вид характеристик также зависит от характера нагрузки и поясняется теми же векторными диаграммами.
. РХ показывает, и как нужно регулировать ток возбуждения при изменении тока нагрузки генератора, чтобы напряжение на зажимах оставалось неизменным. Вид характеристик также зависит от характера нагрузки и поясняется теми же векторными диаграммами.
Рис.3.17. Регулировочные характеристики
инх — это зависимость напряжения на зажимах генератора от тока или М.Д.С. возбуждения при постоянном номинальном токе якоря  и чисто индуктивной нагрузке. ИНХ повторяет форму XXX, но проходит ниже вследствие размагничивающего действия реакции якоря и падения напряжения в якоре.
и чисто индуктивной нагрузке. ИНХ повторяет форму XXX, но проходит ниже вследствие размагничивающего действия реакции якоря и падения напряжения в якоре.
На основании известных XXX и ИНХ можно построить реактивный треугольник (треугольник Потье), который определяет соотношения между этими характеристиками. Для построения реактивного треугольника определяют положение точки В с ординатой  на XXX. Сторона АС треугольника представляет собой падение напряжения в индуктивном сопротивлении рассеяния. Точка А нагрузочной характеристики — это точка пересечения ИНХ с осью абсцисс. Отрезок ОА в масштабе тока возбуждения (МДС) — это ток возбуждения (МДС), которому соответствует режим короткого замыкания с номинальным током якоря. Сторона СА реактивного треугольника пропорциональна току (МДС) возбуждения, который компенсирует размагничивающее действие реакции якоря.
на XXX. Сторона АС треугольника представляет собой падение напряжения в индуктивном сопротивлении рассеяния. Точка А нагрузочной характеристики — это точка пересечения ИНХ с осью абсцисс. Отрезок ОА в масштабе тока возбуждения (МДС) — это ток возбуждения (МДС), которому соответствует режим короткого замыкания с номинальным током якоря. Сторона СА реактивного треугольника пропорциональна току (МДС) возбуждения, который компенсирует размагничивающее действие реакции якоря.
Реактивный треугольник может быть построен и на основании XXX и ХКЗ. Построение реактивного треугольника и индукционной нагрузочной характеристики синхронного генератора по известным: XXX, току якоря, индуктивному сопротивлению рассеяния якоря представлено на рис.
На основании XXX и ИНХ и тока якоря можно определить индуктивное сопротивление рассеяния якоря 
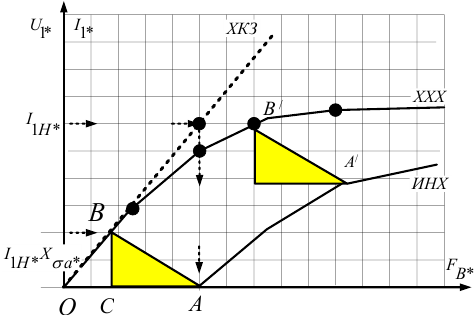
Рис. 3.18. Построение реактивного треугольника и индукционной нагрузочной характеристики синхронного генератора по известным: XXX, току якоря, индуктивному сопротивлению рассеяния якоря
Параллельная работа синхронных генераторов
Параллельная работа синхронных генераторов в современных энергосистемах обеспечивает: повышение надежности электроснабжения, повышение маневренности, повышение экономичности благодаря возможности выбора наиболее экономичных станций, агрегатов, режимов работы, уменьшение мощности необходимого резерва. При параллельной работе синхронных генераторов в мощной энергосистеме:

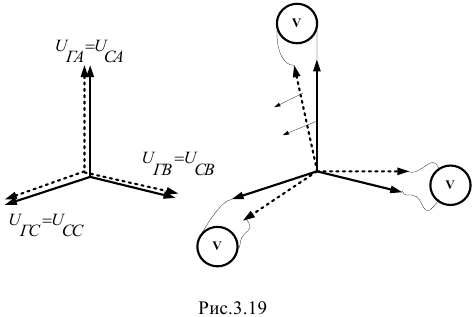
Векторная диаграмма напряжений синхронного генератора и системы при их параллельной работе 
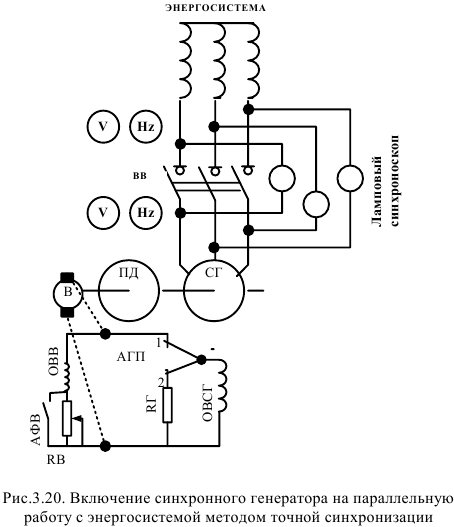
Включение генератора на параллельную работу.
Точная и грубая синхронизация.
При точной синхронизации генератор предварительно приводится во вращение до подсинхронной скорости и возбуждается.
Порядок точной синхронизации, при котором будут отсутствовать чрезмерные токи при включении:
1. Фазировка — должен быть установлен одинаковый порядок чередования фаз.
2. Регулирование напряжения генератора — должно быть установлено равенство напряжений  и совпадение их по фазе.
и совпадение их по фазе.
3. Регулирование частоты генератора — должно быть установлено равенство частот  .
.
4. Выбор момента включения и включение на параллельную работу -синхронизация с использованием синхроноскопа.
При грубой синхронизации (самосинхронизации) — генератор предварительно приводится во вращение до подсинхронной скорости с обмоткой возбуждения, замкнутой на гасительное сопротивление, обмотка якоря подключается к сети, что сопровождается толчками тока якоря, и затем ток возбуждения подается в обмотку возбуждения. Генератор втягивается в синхронизм, что сопровождается большими толчками тока. Их величина согласно ГОСТ ограничивается только 3,5 кратной номинальной величиной тока генератора.
Ламповый синхроноскоп с лампами, включенными на вращение света. Ламповый синхроноскоп с лампами, включенными на погасание. Стрелочный синхроноскоп.
Характеристики синхронных генераторов при параллельной работе
Характеристики снимаются при  ,
,  . Угловые характеристики активной мощности представляют собой зависимость
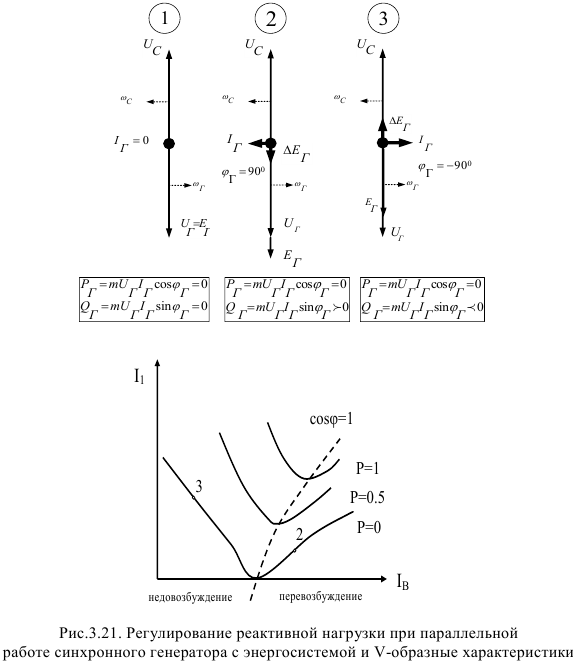
. Угловые характеристики активной мощности представляют собой зависимость  и V-образные характеристики —
и V-образные характеристики — при
при 
V- образные характеристики
V-образные характеристики — это зависимость тока якоря от тока возбуждения при параллельной работе генератора с сетью и . Они могут быть построены на основании векторных диаграмм, поясняющих порядок регулирования реактивных нагрузок.
Угловые характеристики активной мощности 
Явнополюсный СГ
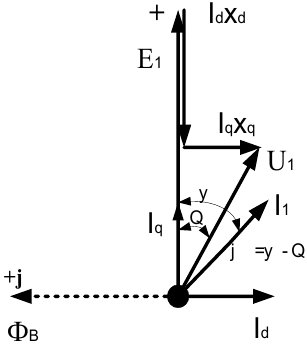
Рис.3.22. Векторная диаграмма синхронного явнополюсного синхронного генератора к выводу выражения угловой характеристики
Где 
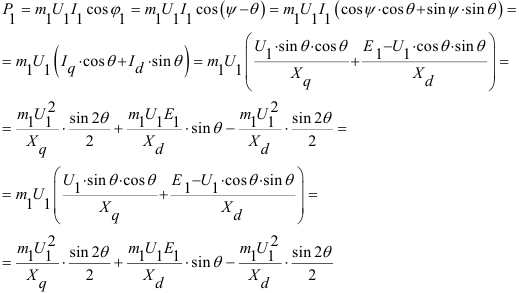
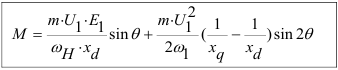
Выражение угловой характеристики явнополюсного синхронного генератора
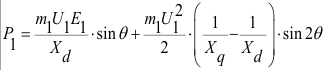
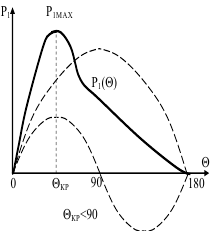
Рис.3.23. Угловая характеристика явнополюсного синхронного генератора:  — максимальная мощность,
— максимальная мощность,  — критический угол нагрузки
— критический угол нагрузки

При отсутствии возбуждения ( ) явнополюсный синхронный генератор развивает активную мощность в синхронном режиме
) явнополюсный синхронный генератор развивает активную мощность в синхронном режиме
за счет несимметрии магнитной цепи ротора, при которой ротор стремится занять в магнитном поле реакции якоря положение, соответствующее минимальному магнитному сопротивлению или минимальной величине энергии.
Понятие о статической устойчивости
Максимальная мощность, развиваемая синхронным генератором при  может быть определена из условия
может быть определена из условия  . Для турбогенератора, например, она равна
. Для турбогенератора, например, она равна
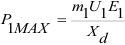
и обратно пропорциональна величине  . При мощности приводного двигателя
. При мощности приводного двигателя  и моменте
и моменте  возможна работа генератора с приводным двигателем при углах нагрузки
возможна работа генератора с приводным двигателем при углах нагрузки  (точка 1 или точка 2 на угловой характеристике).
(точка 1 или точка 2 на угловой характеристике).
При работе в точке 1 при возникновении некоторого небольшого возмущения (например, увеличения или уменьшения напряжения, тока возбуждения или нагрузки), при увеличении угла нагрузки, возрастает отдаваемая генератором мощность, возрастает его противодействующий момент, который обеспечивает замедление ротора, уменьшение угла нагрузки. Это устойчивый режим работы. Это возможно при выполнении условия статической устойчивости  при угле нагрузки
при угле нагрузки 
При работе в точке 2 при угле нагрузки  при увеличении угла нагрузки отдаваемая генератором мощность уменьшается, уменьшается его противодействующий момент, а угол нагрузки возрастает до величины 180°. Ротор генератора ускоряется, и генератор выпадает из синхронизма. Это неустойчивый режим работы. Он возникает при
при увеличении угла нагрузки отдаваемая генератором мощность уменьшается, уменьшается его противодействующий момент, а угол нагрузки возрастает до величины 180°. Ротор генератора ускоряется, и генератор выпадает из синхронизма. Это неустойчивый режим работы. Он возникает при  при угле нагрузки
при угле нагрузки 
Режим работы синхронного генератора является статически устойчивым, если при наличии небольших возмущений изменения угла нагрузки и отдаваемой мощности также невелики и при прекращении действия возмущений восстанавливается режим работы. Мощность ДР , под воздействием которой восстанавливается режим работы, называется синхронизирующей мощностью.
Коэффициент синхронизирующей мощности

Статическая перегружаемость

Величина  нормируется ГОСТ. Для турбо — и гидрогенераторов она находится в пределах 1,6-1,7
нормируется ГОСТ. Для турбо — и гидрогенераторов она находится в пределах 1,6-1,7
Синхронные двигатели и компенсаторы
- Конструкции синхронных двигателей и компенсаторов.
- Обратимость СМ. Работа СМ на ГАЭС.
- Физическое представление о двигательном режиме СД.
- Уравнение напряжений и векторная диаграмма
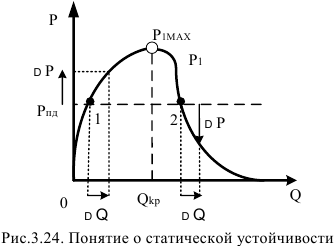
Рис. 3.25. Векторная диаграмма синхронного двигателя в режиме перевозбуждения .
- Преобразование мощности и энергии, потери и КПД
- Активная электрическая мощность

- Угловая характеристика явнополюсного СД
- Реактивная мощность и V-образные характеристики
- Механические и рабочие характеристики
- Способы пуска:
Асинхронный пуск при номинальном или пониженном напряжении,
Частотный пуск с плавным повышением напряжения от 0 до номинального (синхронный пуск),
Пуск с разгонным двигателем.
- Достоинства и недостатки:
- Способность работать с cos$9=1 и опережающим током в режиме перевозбуждения для компенсации реактивной мощности,
- Возможность регулирования максимального момента и меньшая его зависимость от напряжения сети, чем у асинхронного двигателя,
- Высокий КПД,
- Стабильность частоты вращения,
- Малая чувствительность к колебаниям напряжения
- Высокая стоимость и сложность,
- Сложность пуска,
- Нерегулируемость частоты вращения.
Синхронный компенсатор — это синхронная машина, предназначенная только для выработки или потребления реактивной мощности — это синхронный двигатель без нагрузки на валу или синхронный генератор без приводного двигателя.
Назначение, особенности конструкции и режима работы синхронного компенсатора:
- Генерирование реактивной мощности и уменьшение потерь в сетях в режиме перевозбуждения,
- Регулирование напряжения при спадах нагрузки путем их загрузки реактивными токами в режиме недовозбуждения,
- Отсутствие активной нагрузки, отсутствие выступающих концов вала, возможность герметизации, применения водорода при повышенном давлении для охлаждения, меньшие размеры и стоимость по сравнению с двигателем или генератором,
- Порядок пуска — как у синхронного двигатели.
Пуск синхронного двигателя и компенсатора
Возможен асинхронный пуск: прямой пуск или пуск при пониженном напряжении (реакторный, автотрансформаторный, пуск с переключением обмоток с треугольника в звезду), а также частотный (синхронный) пуск двигателя при питании его от автономного преобразователя частоты и пуск с помощью разгонного двигателя.
Асинхронный пуск осуществляется с использованием пусковой обмотки и обмотки возбуждения, замыкаемой при пуске на гасительное сопротивление. Порядок пуска: включение с обмоткой возбуждения, замкнутой на гасительное сопротивление, разгон до подсинхронной скорости, синхронизация.
При включении асинхронного двигателя пусковой ток намного превышает номинальный  , а пусковой момент невелик
, а пусковой момент невелик
- Прямой пуск возможен при выполнении условий:

- Пуск при пониженном напряжении (реакторный пуск, автотрансформаторный пуск, пуск с переключением с треугольника на звезду) следует применять при
 . Коэффициент снижения напряжения
. Коэффициент снижения напряжения
- Реакторный пуск.
- Автотрансформаторный пуск при применении автотрансформатора с коэффициентом трансформации


- Пуск с переключением с треугольника на звезду возможен, если двигатель нормально работает при соединении в треугольник. Фазное напряжение при переключении на звезду снижается в
 раз, а сопротивление фазы увеличивается в раз. Поэтому:
раз, а сопротивление фазы увеличивается в раз. Поэтому:

- Частотный (синхронный) пуск с плавным повышением частоты и напряжения может быть выполнен при включении двигателя через статический (С’ПЧ) или электромашинный преобразователь частоты.
- Пуск с помощью разгонного двигателя.
Устройство и принцип действия машин постоянного тока
Принцип действия генератора основан на явлении электромагнитной индукции — на наведении ЭДС в витке, вращающемся в магнитном поле внешним приводным двигателем. Концы витка выведены на две пластины коллектора. К коллекторным пластинам прижимаются неподвижные щетки, к которым подключается внешняя цепь. Проводники активной части витка пересекают магнитное поле и в них, по закону электромагнитной индукции, наводятся ЭДС, пропорциональные индукции , длине проводника и скорости его движения в магнитном поле  , направление которых определяется по правилу правой руки. При вращении витка в нем наводится знакопеременная ЭДС. С помощью неподвижных щеток, которые являются простейшим механическим выпрямителем, эта ЭДС преобразуется в пульсирующую ЭДС постоянного направления. Если внешняя цепь замкнута, то по ней, под действием этой ЭДС, будет протекать ток постоянного направления. В реальной машине на якоре, находится большое количество витков, присоединенных к своим коллекторным пластинам, соединенных между собой параллельно и последовательно.
, направление которых определяется по правилу правой руки. При вращении витка в нем наводится знакопеременная ЭДС. С помощью неподвижных щеток, которые являются простейшим механическим выпрямителем, эта ЭДС преобразуется в пульсирующую ЭДС постоянного направления. Если внешняя цепь замкнута, то по ней, под действием этой ЭДС, будет протекать ток постоянного направления. В реальной машине на якоре, находится большое количество витков, присоединенных к своим коллекторным пластинам, соединенных между собой параллельно и последовательно.
Поэтому пульсации ЭДС и тока на выходе невелики, и можно говорить, что ток и ЭДС на выходе машины являются постоянными.
Для реального генератора справедливо уравнение напряжений:

где:
 — ток якоря;
— ток якоря;
 — сопротивление цепи якоря;
— сопротивление цепи якоря;
 — ЭДС якоря;
— ЭДС якоря;
 — электромашинная постоянная, зависящая от параметров машины:
— электромашинная постоянная, зависящая от параметров машины:
N — число проводников,
р — число пар полюсов,
а — число параллельных ветвей обмотки якоря
При протекании тока в проводниках витка, вращающихся в магнитном поле, возникает сила Ампера  препятствующая вращению витка,
препятствующая вращению витка,
направление которой определяется правилом левой руки. Эта сила в реальной машине образует противодействующий вращающий момент. Для реального генератора справедливо уравнение моментов
где:
 противодействующий момент,
противодействующий момент,
 — момент холостого хода.
— момент холостого хода.
Принцип действия двигателя. То же устройство работает в режиме электрического двигателя, если к щеткам подвести постоянное напряжение. Под действием напряжения через щетки, пластины коллектора и виток потечет ток. Коллектор в режиме двигателя обеспечивает контакт внешней цепи с витком, но и выполняет функцию механического инвертора, т.е. преобразует постоянный ток во внешней цепи в переменный ток в витке.
При протекании тока в проводниках витка, находящегося в магнитном поле, возникает сила Ампера  , приводящая виток во вращение, направление которой определяется правилом левой руки. Эта сила в реальном двигателе образует движущий вращающий момент, приводящий ротор (якорь) двигателя во вращение
, приводящая виток во вращение, направление которой определяется правилом левой руки. Эта сила в реальном двигателе образует движущий вращающий момент, приводящий ротор (якорь) двигателя во вращение
где  движущий момент
движущий момент
Для реального двигателя справедливо уравнение напряжений
где  — противо — ЭДС
— противо — ЭДС
Машина постоянного тока может работать в режиме генератора и в режиме двигателя, т. е. обладает свойством обратимости.
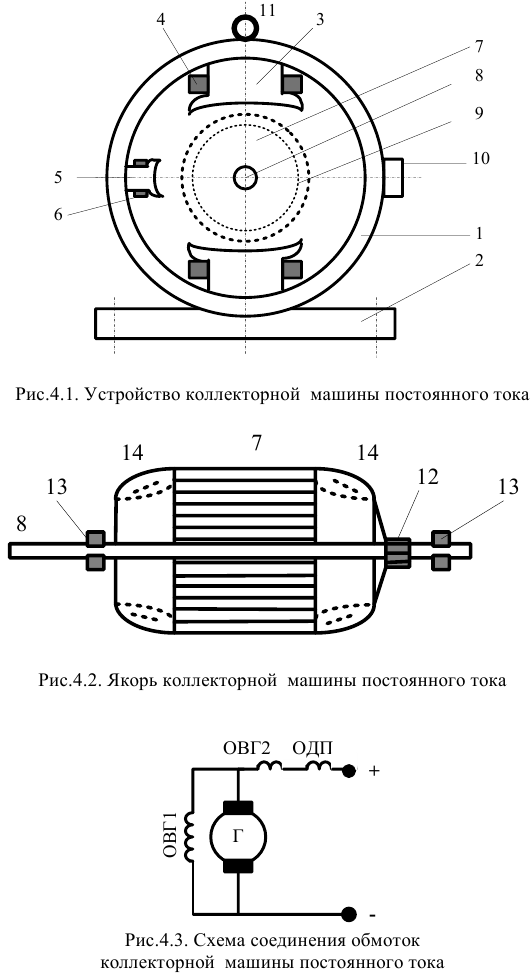
Устройство машины постоянного тока.
Конструкция машины представлена на рис. 4.1., 4.2., где:
1 -станина (чугунная или стальная) на лапах или с фланцем,
2 — лапы станины с отверстиями для крепления,
3 — главный полюс (сердечник и полюсный наконечник из конструкционной стали, цельный литой или шихтованный),
4 — обмотка (обмотки) возбуждения (медный изолированный провод), ОВ
5 — дополнительный (коммутационный) полюс, из конструкционной стали, цельный литой или шихтованный,
6 — обмотка дополнительного полюса, ОДП
7 — якорь (ротор) с шихтованным цилиндрическим магнитопроводом из электротехнической стали с пазами для укладки обмотки, с обмоткой якоря, коллектором, подшипниками,
8 — вал,
9 — зубцовая зона якоря,
10 — клеммная коробка,
11 — рым болт,
12 — коллектор,
13 — подшипники, устанавливаемые в подшипниковых щитах,
14 — обмотка якоря.
Кроме того, на рисунках не показаны: щеточный аппарат (щетки, щеткодержатели, щеточные пальцы, щеточные траверсы), подшипниковые щиты, подшипниковые крышки, обмотка якоря
Магнитное поле при XX и нагрузке
При XX магнитное поле создается индуктором, является однородным (рис 4.4.а) и распределяется под полюсом по трапециедальному закону (рис 4.5 тонкая линия). При щетках, установленных на геометрической нейтрали, поле реакции якоря направлено вдоль поперечной оси машины (рис 4.4.6). Результирующий магнитный поток показан на рис 4.4.в.
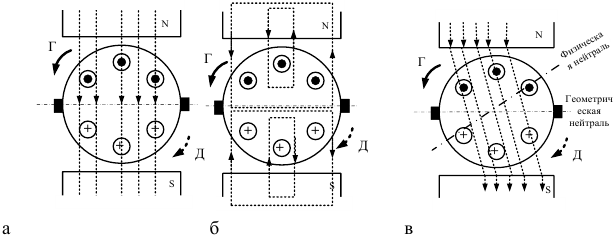
Рис. 4.4. Магнитное поле машины постоянного тока при щетках, установленных на геометрической нейтрали. Действие реакции якоря
При нагрузке машины при щетках, установленных на линии геометрической нейтрали, картины магнитного поля искажаются. Увеличивается плотность магнитного потока под сбегающим краем полюса в генераторе (под набегающим краем в двигателе), и физическая нейтраль смещается относительно геометрической нейтрали в сторону вращения якоря в генераторе (в сторону, противоположную вращения, в двигателе). Кривая индукции поля отличается от кривой МДС наличием седлообразных провалов. Результирующая кривая индукции проходит через «О» в зоне физической нейтрали
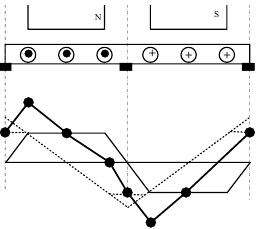
Рис. 4.5. Магнитное поле машины постоянного тока при щетках, установленных на геометрической нейтрали. Действие реакции якоря
Процессы коммутации тока. Настройка коммутации
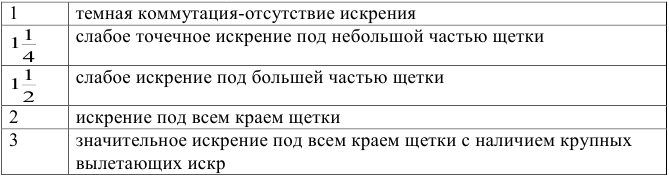
Коммутация — это совокупность явлений, связанных с изменением тока в секции, замыкаемой накоротко щеткой при переключении секции из одной параллельной ветви в другую. Качество коммутации оценивается пятью классами (табл.4.1.). Первые три класса, указанные в таблице, допускаются для длительной работы.
Таблица 4.1. Классы коммутации:
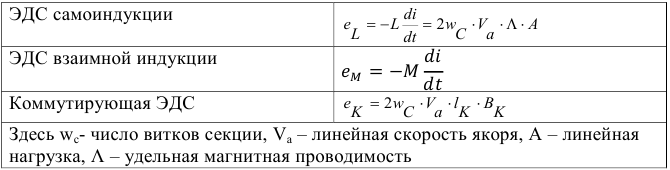
Сущность процесса коммутации: в процессе коммутации ток секции меняет свое направление (рис.4.6), поэтому внутри МПТ протекает переменный ток. При этом в секции коммутирующего контура действуют ЭДС, приведенные в таблице 4.2.
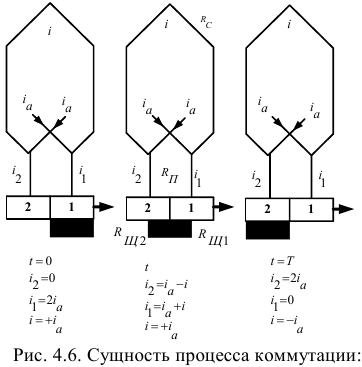
Таблица 4.2. ЭДС коммутирующего контура
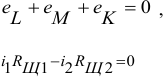
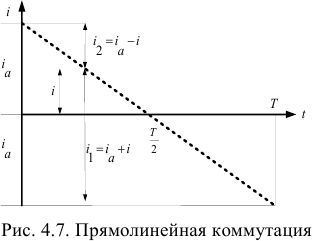
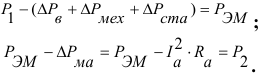
На основании вышеизложенного, уравнение коммутации имеет вид:

Если предположить, что  , тогда уравнение коммутации
, тогда уравнение коммутации
примет вид
Это прямолинейная коммутация или коммутация сопротивлением (рис.4.7).
При прямолинейной коммутации плотность тока постоянна по всей длине щетки. При этом условия коммутации наилучшие.
Выражение  является решением уравнения прямолинейной коммутации с учетом соотношений
является решением уравнения прямолинейной коммутации с учетом соотношений

Характеристики генераторов постоянного тока
Диаграмма преобразования мощности и уравнение напряжений ГПТ
Энергетическая диаграмма ГПТ приведена на рис.4.8. Генератор приводится в движение приводным двигателем. Мощность на валу генератора равна мощности приводного двигателя:

 — потери мощности на возбуждение ГПТ;
— потери мощности на возбуждение ГПТ;
 механические потери (на трение подшипников, вентиляционные потери, потери на трение щеток);
механические потери (на трение подшипников, вентиляционные потери, потери на трение щеток);
 — потери в стали якоря (на гистерезис, вихревые токи);
— потери в стали якоря (на гистерезис, вихревые токи);
 . потери в меди якоря.
. потери в меди якоря.
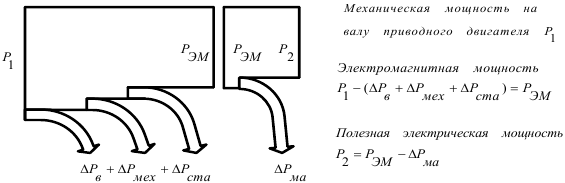
Рис. 4.8. Диаграмма преобразования мощности и уравнение напряжений генератора постоянного тока
В соответствии с приведенной диаграммой можно записать следующие уравнения:
Преобразовав приведенные выражения, получим уравнение напряжений для генератора:
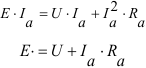
ЭДС обмотки якоря МПТ
При вращении якоря в магнитном поле, в проводниках обмотки якоря наводится ЭДС. На основании закона электромагнитной индукции, ЭДС МПТ пропорциональна магнитному потоку и частоте вращения:
где
 -ЭДС проводника,
-ЭДС проводника,
Е- ЭДС обмотки якоря,
С — машинная постоянная:

При работе МПТ в режиме генератора, направление ЭДС определяется по правилу правой руки.
Направление действия силы на проводник с током, находящимся в магнитном поле определяется по правилу левой руки
Электромагнитный момент и уравнение моментов МПТ
Сила, действующая на проводник с током в магнитном поле и соответствующий врашаюший момент определяются по формулам
Тогда с учетом числа проводников, находящихся под полюсом  , находим электромагнитный момент машины М:
, находим электромагнитный момент машины М:

В генераторе электромагнитный момент является противодействующим, т.е. направлен в сторону, противоположную моменту приводного двигателя. Уравнение моментов генератора:
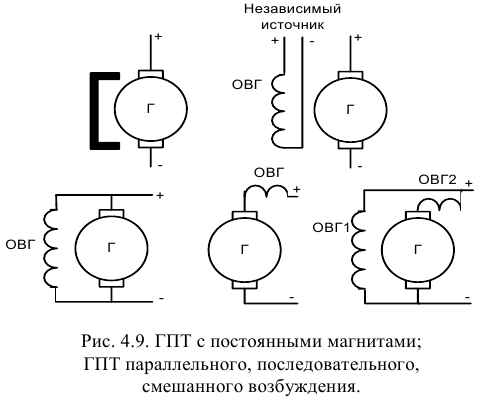
Способы возбуждение генераторов постоянного тока (ГПТ)
По способу возбуждения ГПТ делятся на (рис.4.9) :
- ГПТ независимого возбуждения. Обмотка возбуждения питается от независимого источника. К этому типу генераторов относятся ГПТ с постоянными магнитами;
- ГПТ параллельного возбуждения. Обмотка возбуждения подключена параллельно обмотке якоря:
- ГПТ последовательного возбуждения; Обмотка возбуждения подключена последовательно с обмоткой якоря:
- ГПТ смешанного возбуждения. Генератор такого типа имеет две обмотки возбуждения — последовательную и независимую.
Характеристики генератора независимого возбуждения.
Характеристика холостого хода (XXX) снимается в 4х квадрантах. Расчетная XXX проводится как средняя линия между нисходящей и восходящей линиями петли гистерезиса.
Характеристика короткого замыкания ХКЗ.
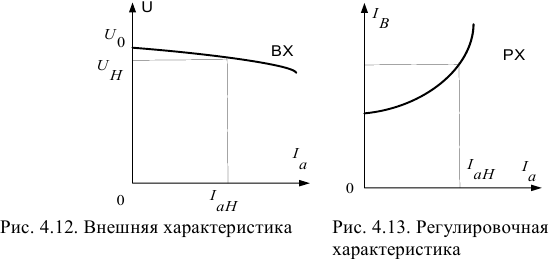
Внешняя характеристика ВХ. Напряжение на зажимах генератора при увеличении тока нагрузки и постоянном токе возбуждения  уменьшается из-за увеличивающего падения напряжения якоря и размагничивающего действия реакции якоря.
уменьшается из-за увеличивающего падения напряжения якоря и размагничивающего действия реакции якоря.
Регулировочная характеристика РХ. Зависимость тока возбуждения от тока якоря при постоянном напряжении. РХ показывает, как нужно регулировать ток возбуждения, чтобы при изменении тока якоря напряжение оставалось постоянным.
Нагрузочная характеристика НГ. Зависимость напряжения от тока возбуждения при постоянном токе якоря, равном номинальному. НХ имеет такую же форму, как и XXX, но проходит ниже из — за падения напряжения в обмотке якоря и размагничивающего действия реакции якоря. Если к НГ добавить падение напряжения  , то получим внутреннюю характеристику генератора и характеристический треугольник АВС. Катет АВ- соответствует падению напряжения в якоре, катет ВС- соответствует размагничивающему действию реакции якоря.
, то получим внутреннюю характеристику генератора и характеристический треугольник АВС. Катет АВ- соответствует падению напряжения в якоре, катет ВС- соответствует размагничивающему действию реакции якоря.
Характеристики генераторов с самовозбуждением
К генераторам с самовозбуждением относятся генераторы параллельного, последовательного и смешанного возбуждения.
Для того, чтобы произошло самовозбуждение, необходимо соблюдение следующих условий :
- Наличие остаточного магнитного потока. Для самовозбуждения достаточно 2-3% от номинального,
- Совпадение созданного и остаточного магнитного потоков по направлению,
- Скорость вращения при данном сопротивлении обмотки возбуждения RB , должна быть выше некоторого критического значения

- Сопротивление цепи возбуждения при данной скорости вращения должно быть меньше критического
Процесс самовозбуждения происходит следующим образом:при вращении якоря в магнитном поле, в нем наводится ЭДС, под действием которой начинает протекать ток. Ток создает дополнительный магнитный поток, совпадающий по направлению с остаточным магнитным полем. Происходит дальнейшее увеличение ЭДС и тока  . Увеличение магнитного потока происходит до тех пор, пока не установиться равновесие
. Увеличение магнитного потока происходит до тех пор, пока не установиться равновесие  Графически процесс самовозбуждения при холостом ходе можно пояснить с помощью рис.4.14. Самовозбуждение ГПТ возможно при наличии точки пересечения XXX и характеристика цепи возбуждения
Графически процесс самовозбуждения при холостом ходе можно пояснить с помощью рис.4.14. Самовозбуждение ГПТ возможно при наличии точки пересечения XXX и характеристика цепи возбуждения  .
.
В процессе самовозбуждения ток возбуждения увеличивается и нарастание U происходит сначала медленно, затем ускоряется и к концу процесса вновь замедляется из-за криволинейности XXX. Процесс самовозбуждения прекращается в точке пересечения характеристик.
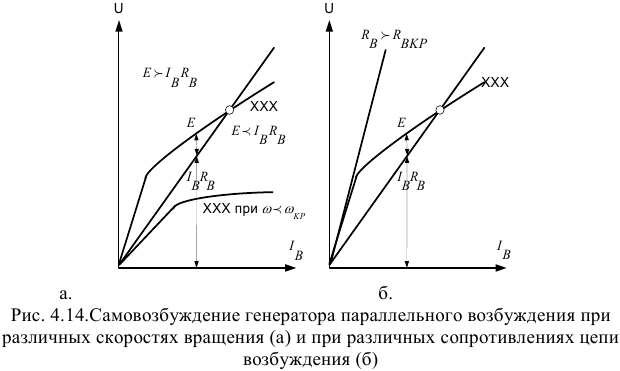
Лекция 4.5. Характеристики двигателей постоянного тока
Принцип обратимости электрических машин
Принцип обратимости электрической машины сформулировал Э.Х.Ленц в 1833г. Принцип обратимости заключается в том, что любая электрическая машина может работать в генераторном и двигательном режимах. .При работе машины в режиме генератора, она развивает электрический момент Мг, который является тормозным по отношению к вращающемуся моменту  приводного двигателя и преобразовывает подводимую к ней механическую мощность в электрическую. При работе в режиме двигателя, машина развивает вращающий момент М и преобразовывает подводимую к ней электрическую мощность в механическую.
приводного двигателя и преобразовывает подводимую к ней механическую мощность в электрическую. При работе в режиме двигателя, машина развивает вращающий момент М и преобразовывает подводимую к ней электрическую мощность в механическую.
Классификация ДПТ
Двигатели постоянного тока классифицируются по способу включения обмотки возбуждения по отношению к якорю. ДПТ бывают (рис.4.15):
- независимого возбуждения (НВ). Обмотка возбуждения питается от независимого источника. К этому типу относятся ДПТ с постоянными магнитами;
- параллельного возбуждения. Обмотка возбуждения подключена параллельно обмотке якоря:
- последовательного возбуждения (ПВ). Обмотка возбуждения подключена последовательно с обмоткой якоря:
- смешанного возбуждения (СВ). Двигатель такого типа имеет две обмотки возбуждения — последовательную и независимую.
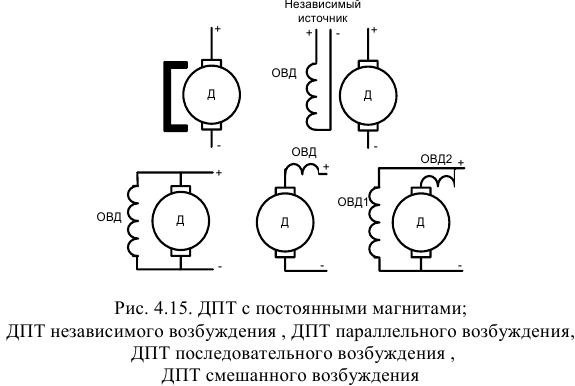
Характеристики ДПТ параллельного возбуждения
Скоростная и механическая характеристики ДПТ параллельного возбуждения представлены на рис 4.16 ,а, б.
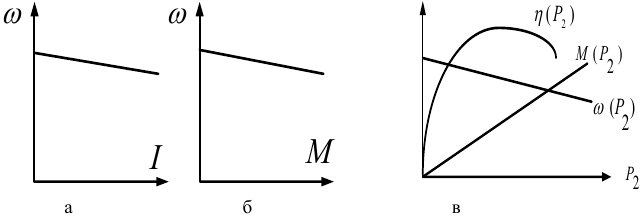
Рис. 4.16 Характеристики ДПТ параллельного возбуждения а. скоростная характеристика
б. механическая характеристика
в. рабочие характеристики
На рис.4.16 в. представлены рабочие характеристики двигателя -зависимости КПД, скорости, вращающего момента от нагрузки при  . Регулировочные характеристики определяют собою свойства двигателей при регулировании скорости их вращения.
. Регулировочные характеристики определяют собою свойства двигателей при регулировании скорости их вращения.
Характеристики ДПТ смешанного возбуждения
Так как ток возбуждения последовательной обмотки возбуждения равен току якоря и изменяется одновременно с ним, то магнитный поток ДПТ последовательного возбуждения зависит от нагрузки, что составляет его характерную особенность:

то момент двигателя (рис. 4.17):  — парабола
— парабола
С учетом вышесказанного, можно записать уравнения для скоростной и механической характеристик:
Скоростная характеристика  — гипербола
— гипербола
Механическая характеристика  — гипербола
— гипербола
При значительном уменьшении нагрузки, двигатель начинает развивать все большую скорость ( идет «вразнос»). При холостом ходе поток стремится к нулю и скорость двигателя приобретает значения, опасные по своим механическим последствиям — разрыв бандажей, порча обмотки якоря… Поэтому ДПТ последовательного возбуждения не должны работать на холостом ходу. ГОСТ устанавливает минимальную нагрузку на валу 25% от номинальной нагрузки, для предотвращения работы ДПТ в режиме холостого хода. Скоростная и механическая характеристики ДПТ последовательного возбуждения представлены на рис 4.17 ,а, б.
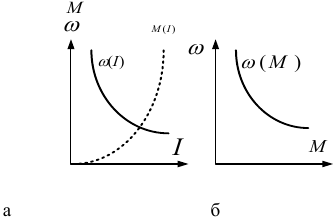
Рис. 4.17 Скоростная (а) и механическая (б) характеристики ДПТ последовательного возбуждения
Рабочие характеристики двигателя — зависимости КПД, скорости, вращающего момента от нагрузки аналогичны рабочим характеристикам ДПТ параллельного возбуждения.
Характеристики ДПТ смешанного возбуждения
У ДПТ смешанного возбуждения имеется две обмотки возбуждения -последовательная и параллельная Последовательная обмотка возбуждения может быть включена по отношению к параллельной (основной) обмотке как согласно, так и встречно. При согласном включении обмоток возбуждения их МДС складываются, вследствие чего результирующий поток возбуждения усиливается. При встречном включении обмоток результирующий поток представляет собой разность потоков параллельной и последовательной обмоток возбуждения.
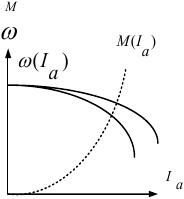
Рис. 4.18 Скоростная характеристика ДПТ смешанного возбуждения
Механические характеристики электродвигателей и механизмов. Статическая устойчивость.
Главными частями электропривода механизма являются исполнительный механизм и электродвигатель, сообщающий механизму тот или иной вид движения. Для их согласованной работы необходима определенная взаимосвязь между механическими характеристиками двигателя  и исполнительного механизма
и исполнительного механизма  , как в установившемся режиме работы, так и в переходных режимах. Под устойчивостью работы двигателя понимается его способность вернуться к исходному, установившемуся режиму работы. Установившийся режим работы характеризуется работой двигателя с неизменной скоростью. Значение скорости и момента в установившемся режиме электропривода определяются точкой пересечения механических характеристик двигателя и исполнительного механизма М = Мс, рис.4.19. В общем случае устойчивая работа электропривода обеспечивается при условии
, как в установившемся режиме работы, так и в переходных режимах. Под устойчивостью работы двигателя понимается его способность вернуться к исходному, установившемуся режиму работы. Установившийся режим работы характеризуется работой двигателя с неизменной скоростью. Значение скорости и момента в установившемся режиме электропривода определяются точкой пересечения механических характеристик двигателя и исполнительного механизма М = Мс, рис.4.19. В общем случае устойчивая работа электропривода обеспечивается при условии  , рис.4.20.
, рис.4.20.
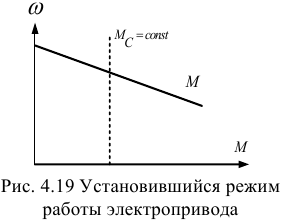
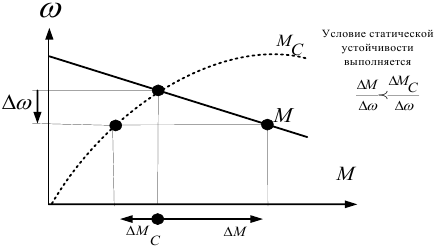
Рис. 4.20 Статическая устойчивость электропривода.
Пуск двигателей постоянного тока.
Реостатный пуск
На основании скоростной характеристики двигателя при неподвижном роторе в начале пуска ток превышает номинальную величину в 20 и более раз  Пусковой момент также значительно превышает номинальное значение поскольку
Пусковой момент также значительно превышает номинальное значение поскольку  . Поэтому для ограничения пускового тока и пускового момента в цепь ротора (якоря) вводят дополнительное сопротивление (пусковой реостат). Схема реостатного пуска ДПТ параллельного возбуждения приведена на рис.4.21, . процесс пуска изображен на рис.4.22.
. Поэтому для ограничения пускового тока и пускового момента в цепь ротора (якоря) вводят дополнительное сопротивление (пусковой реостат). Схема реостатного пуска ДПТ параллельного возбуждения приведена на рис.4.21, . процесс пуска изображен на рис.4.22.
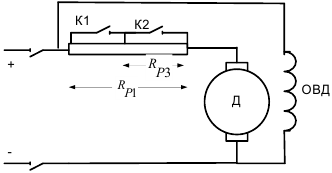
Рис. 4.21 Схема реостатного пуска ДПТ параллельного возбуждения
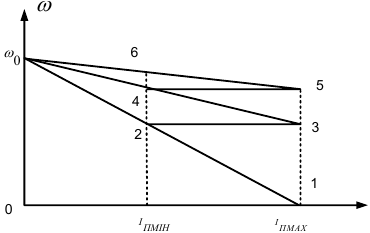
Рис. 4.22 Реостатный пуск ДПТ параллельного возбуждения
В момент пуска угловая скорость равна нулю. Тогда, с учетом пускового реостата, уравнение скоростной характеристики будет иметь вид:
Зная сопротивление якоря, можно определить необходимую величину пускового реостата:
Согласно рис.4.22, при пуске двигателя с данным пусковым реостатом, двигатель будет разгоняться по прямой на отрезке 1-2, и в точке 2 при достижении тока значения  , первая ступень реостата отключается. Двигатель переходит на работу в точку 3. Расчет сопротивления реостата осуществляется по приведенным ниже формулам:
, первая ступень реостата отключается. Двигатель переходит на работу в точку 3. Расчет сопротивления реостата осуществляется по приведенным ниже формулам:
На участке прямой 3-1 двигатель продолжает разгон, в точке 4 пусковой реостат отключают и двигатель начинает работу на естественной характеристике. Последняя ступень реостата рассчитывается аналогично:

Пуск при плавном повышении напряжения
Плавный пуск ДПТ возможен при повышении подводимого напряжения от О до номинального значения. Представленная на рис.4.23.схема плавного пуска включает в себя питание ДПТ от управляемых выпрямителей. Для осуществления плавного пуска ДПТ также применяется система Г-Д
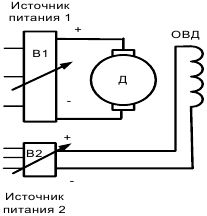
Рис. 4.23 Пуск ДПТ при плавном повышении напряжения
Регулирование частоты вращения двигателей постоянного тока
Из уравнения скоростной характеристики следует, что частоту вращения двигателей постоянного тока можно регулировать тремя способами:
- изменением реостата в цепи якоря;
- изменением напряжения сети;
- изменением потока возбуждения.
Скоростные и механические характеристики двигателей, снятые при номинальном напряжении, номинальном магнитном потоке, отсутствии добавочных сопротивлений в цепи якоря называются естественными. При введении добавочного сопротивления в цепь якоря, или же изменении других номинальных параметров (напряжения, потока) получают семейство искусственных скоростных и механических характеристик двигателя постоянного тока.
При введении добавочного сопротивления в цепь якоря получаем семейство реостатных характеристик.
Регулирование частоты вращения изменением сопротивления в цепи якоря
ДПТ параллельного возбуждения. Схема реостатного регулирования ДПТ параллельного возбуждения представлена на рис.4.24.
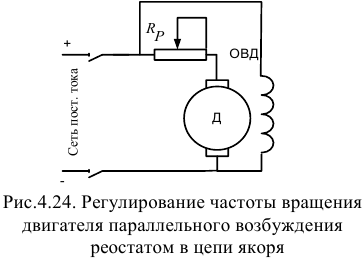
Для двигателя параллельного возбуждения уравнение скоростной характеристики имеет вид
Величину угловой скорости на естественной характеристике при отсутствии реостата в цепи якоря и на искусственной характеристике при включенном сопротивлении реостата можно определить следующим образом:
На основании чего, можно рассчитать отношение скоростей на естественной характеристике при отсутствии реостата в цепи якоря и на искусственной характеристике при включенном сопротивлении реостата. При регулировании частоты вращения реостатом в цепи якоря подводимая к двигателю из сети мощность  остается без изменений , полезная мощность двигателя уменьшается пропорционально угловой скорости
остается без изменений , полезная мощность двигателя уменьшается пропорционально угловой скорости  . КПД снижается пропорционально снижению частоты вращения, ухудшаются условия охлаждения, возможна неустойчивая работа при значительном снижении частоты вращения, диапазон регулирования зависит от нагрузки, а скорость холостого хода вообще не регулируется (рис.4.25.).
. КПД снижается пропорционально снижению частоты вращения, ухудшаются условия охлаждения, возможна неустойчивая работа при значительном снижении частоты вращения, диапазон регулирования зависит от нагрузки, а скорость холостого хода вообще не регулируется (рис.4.25.).
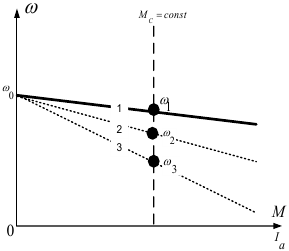
Рис.4.25. Скоростные (механические) характеристики двигателя параллельного возбуждения при регулировании частоты вращения реостатом в цепи якоря
Сопротивление якоря не является паспортной величиной. Для расчетов его приближенное значение можно определить, исходя из предположения о равенстве постоянных и переменных потерь:
ДПТ последовательного возбуждения. Регулирование частоты вращения двигателя последовательного возбуждения реостатом в цепи якоря представлено на рис.4.26. Для двигателя последовательного возбуждения процесс реостатного регулирования усложняется тем, что одновременно с током якоря изменяется ток возбуждения. Уравнение скоростной характеристики двигателя последовательного возбуждения для данного способа регулирования имеет вид:
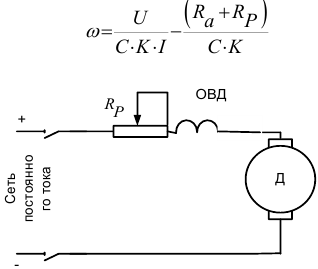
Рис.4.26. Регулирование частоты вращения двигателя последовательного возбуждения реостатом в цепи якоря
Скоростные (механические) характеристики двигателя параллельного возбуждения при регулировании частоты вращения реостатом в цепи якоря представлены на рис. 4.27.
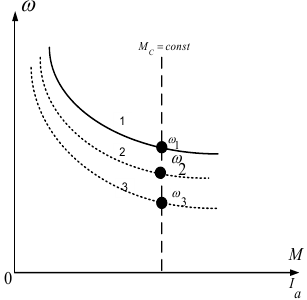
Рис.4.27. Скоростные (механические) характеристики двигателя параллельного возбуждения при регулировании частоты вращения реостатом в цепи якоря
Регулирование частоты вращения двигателя параллельного возбуждения изменением магнитного потока
На рис 4.28. представлена схема регулирования частоты вращения двигателя параллельного возбуждения изменением магнитного потока при постоянном напряжении. Магнитный поток уменьшается, при введении сопротивления в цепь обмотки возбуждения, при этом частота вращения увеличивается.
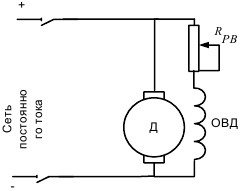
Рис.4.28. Регулирование частоты вращения двигателя параллельного возбуждения изменением магнитного потока
Механические (скоростные) характеристики двигателя параллельного возбуждения при регулировании изменением магнитного потока представлены на рис.4.29. Регулирование однозонное вверх от основной скорости. Диапазон регулирования в данном случае не более 1:3, так как при сильном ослаблении магнитного потока нарушается устойчивость работы двигателя.
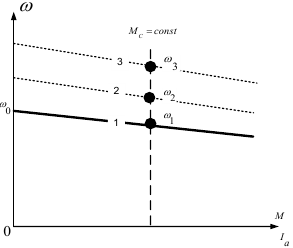
Рис.4.29. Механические (скоростные) характеристики двигателя параллельного возбуждения при регулировании изменением магнитного потока
Регулирование частоты вращения двигателя последовательного возбуждения изменением магнитного потока
Существует два способа регулирования частоты вращения двигателя последовательного возбуждения изменением магнитного потока :
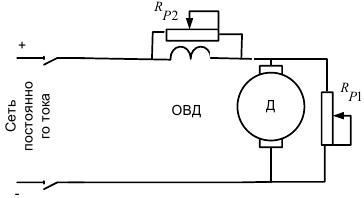
Рис.4.30. Регулирование частоты вращения двигателя последовательного возбуждения изменением магнитного потока
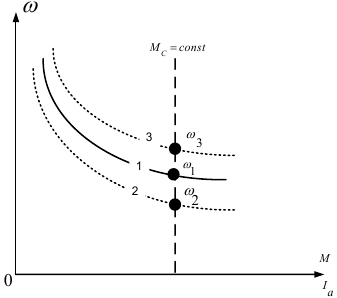
Рис. 4.31. Механические (скоростные) характеристики двигателя последовательного возбуждения при регулировании изменением магнитного потока
При шунтировании обмотки возбуждения ток обмотки становится меньше тока якоря, увеличивается подводимая к двигателю мощность  , полезная мощность
, полезная мощность  . КПД двигателя почти не изменяется. Шунтирование обмотки возбуждения применяется в электротяге.
. КПД двигателя почти не изменяется. Шунтирование обмотки возбуждения применяется в электротяге.
При шунтировании обмотки якоря ток якоря становится меньше тока обмотки возбуждения. В этом случае потребляемая двигателем мощность  увеличивается, полезная мощность двигателя
увеличивается, полезная мощность двигателя  уменьшается. Регулирование однозонное вниз. Диапазон регулирования в данном случае составляет 1:5
уменьшается. Регулирование однозонное вниз. Диапазон регулирования в данном случае составляет 1:5
Регулирование частоты вращения двигателя параллельного возбуждения изменением напряжения и магнитного потока
Для такого способа регулирования частоты вращения обычно применяется система Г-Д (рис.4.32)
Функции системы Г-Д:
1) пуск с плавным повышением напряжения от 0 до номинального при полном возбуждении двигателя,
2) двухзонное регулирование частоты вращения двигателя: 1 зона — от 0 до  плавным изменением напряжения на двигателе при постоянном номинальном токе возбуждения двигателя
плавным изменением напряжения на двигателе при постоянном номинальном токе возбуждения двигателя  и 2 зона — от
и 2 зона — от  вверх изменением (уменьшением) тока возбуждения двигателя при постоянном напряжении на двигателе
вверх изменением (уменьшением) тока возбуждения двигателя при постоянном напряжении на двигателе 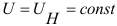 , (рис.4.32),
, (рис.4.32),
3) реверсирование двигателя изменением полярности подводимого к двигателю от генератора напряжения,
4) рекуперативное торможение при снижении ЭДС генератора путем уменьшения тока возбуждения генератора.
5) Система обеспечивает широкий диапазон регулирования частоты вращения двигателя, особенно в автоматической системе регулирования с обратными связями по току и частоте вращения двигателя.
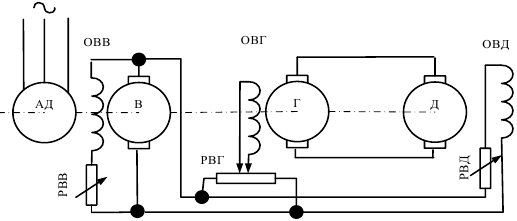
Рис.4.32. Регулирование частоты вращения двигателя параллельного возбуждения изменением напряжения и магнитного потока в системе Г-Д
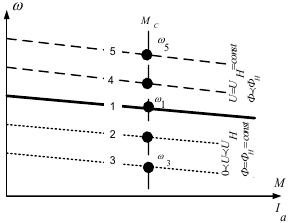
Рис.4.33. Механические характеристики двигателя параллельного возбуждения при регулировании частоты вращения изменением напряжения и магнитного потока в системе Г-Д
Система ГД позволяет получить быстрый пуск и реверсирование исполнительного двигателя. Для осуществления реверса достаточно изменить на обратное направление ток возбуждения генератора. Торможение двигателя также производится путем регулирования напряжения генератора (рекуперативное торможение).
Характеристики двигателя параллельного возбуждения при регулировании частоты вращения изменением напряжения и магнитного потока в системе Г-Д представлены на рис.4.34.
При изменении напряжения поток возбуждения остается неизменным, поэтому в этой зоне характеристика момента и мощности представляют собой прямые, далее, при изменении потока возбуждения при неизменном напряжении, подводимая мощность остается постоянной, момент будет изменяться по гиперболическому закону.
Торможение двигателей постоянного тока
В ряде установок режимы электрического торможения двигателей имеют существенное значение. Существует следующие виды торможения двигателей постоянного тока :
- динамическое;
- противовключением;
- рекуперативное (генераторное) с возвратом электроэнергии в сеть.
Динамическое торможение
При динамическом торможении ДПТ параллельного возбуждения якорь двигателя отключается от сети и замыкается на сопротивление  , а ток в цепи возбуждения оставляют без изменения (рис.4.35). Машина начинает работать в режиме генератора независимого возбуждения, используя запас кинетической энергии агрегата.
, а ток в цепи возбуждения оставляют без изменения (рис.4.35). Машина начинает работать в режиме генератора независимого возбуждения, используя запас кинетической энергии агрегата.

Уравнение напряжений ДПТ во общем виде: 
При динамическом торможении и  уравнение напряжений ДПТ принимает вид:
уравнение напряжений ДПТ принимает вид:

откуда
Вращающий момент  становится отрицательным, т.е. тормозящим. Торможение интенсивное. Время торможения можно регулировать сопротивлением в цепи якоря. Торможение остановочное. Сопровождается потерей запасенной вращающимся ротором энергии. Эта энергия идет на нагрев реостата и обмотки якоря. Торможение неэкономичное. Механические (скоростные) характеристики двигателя параллельного возбуждения при динамическом торможении приведены на рис. 4.36. Режим динамического торможения изображен отрезком 2-3.
становится отрицательным, т.е. тормозящим. Торможение интенсивное. Время торможения можно регулировать сопротивлением в цепи якоря. Торможение остановочное. Сопровождается потерей запасенной вращающимся ротором энергии. Эта энергия идет на нагрев реостата и обмотки якоря. Торможение неэкономичное. Механические (скоростные) характеристики двигателя параллельного возбуждения при динамическом торможении приведены на рис. 4.36. Режим динамического торможения изображен отрезком 2-3.
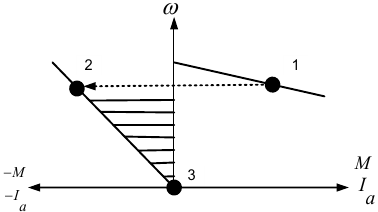
Рис.4.36. Механические (скоростные) характеристики двигателя параллельного возбуждения при динамическом торможении
Торможение противовключением
Режим торможения противовключением осуществляется двумя способами:
- когда исполнительный механизм приводит машину во вращение в сторону, противоположную той, в какую действует развиваемый двигателем момент (например, при включении в цепь якоря двигателя, поднимающего груз, достаточно большого сопротивления);
- при переключении направления вращения двигателя на противоположное путем изменения направления тока в якоре.
Уравнение напряжений  при торможении противовключением
при торможении противовключением  принимает вид
принимает вид

откуда
Вращающий момент  становится тормозящим. Торможение интенсивное. Время торможения можно регулировать сопротивлением в цепи якоря. Торможение остановочное.
становится тормозящим. Торможение интенсивное. Время торможения можно регулировать сопротивлением в цепи якоря. Торможение остановочное.
Подводимая к двигателю со стороны сети и с вала мощность теряется, т.е. расходуется на нагрев реостата и обмотки якоря. Торможение неэкономичное.
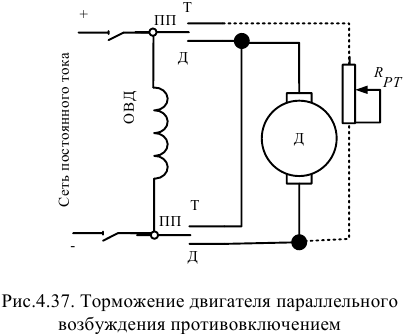
Механические (скоростные) характеристики двигателя параллельного возбуждения при торможении противовключением представлены на рис.4.38. В данном случае при необходимости затормозить двигатель необходимо контролировать частоту вращения ротора и производить отключение ДПТ при скорости ротора равной нулю (отрезок 2-3).
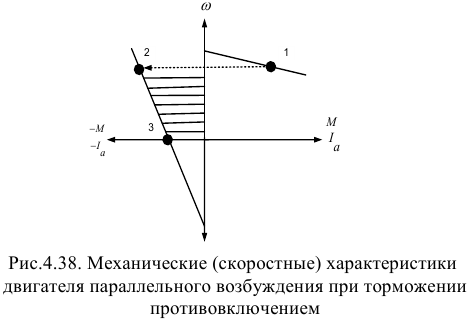
Рекуперативное (генераторное) торможение
Такой вид торможения для ДПТ параллельного возбуждения применяется, например, когда машина, работающая в режиме двигателя со скоростью  переходит на работу с более низкой скоростью
переходит на работу с более низкой скоростью 
Решение уравнения напряжений  при рекуперативном торможении при
при рекуперативном торможении при  имеет вид
имеет вид
Вращающий момент  становится тормозящим. Торможение интенсивное. Торможение может применяться как для остановки, так и для подтормаживания. Энергия торможения возвращается в сеть. Торможение экономичное.
становится тормозящим. Торможение интенсивное. Торможение может применяться как для остановки, так и для подтормаживания. Энергия торможения возвращается в сеть. Торможение экономичное.
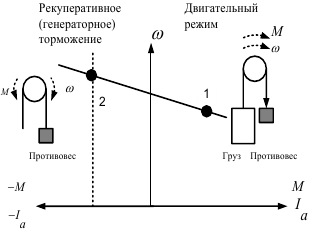
Рис.4.39. Механические (скоростные) характеристики двигателя параллельного возбуждения при рекуперативном (генераторном) торможении.
Возможно эти страницы вам будут полезны:
- Предмет электрические машины
- Задачи по электрическим машинам с решениями
- Курсовая работа по электрическим машинам
- Помощь по электрическим машинам
