
Оглавление:

Задача о равновесии при наличии трения
До сих пор мы рассматривали равновесие преимущественно идеальных механических систем, предполагая, что поверхности соприкасающихся тел являются абсолютно гладкими и что всякое трение между соприкасающимися телами отсутствует, а сами тела — абсолютно твердые. Такие предположения лишь приближенно соответствуют действительности. В частности, в реальных задачах невозможно полностью исключить влияние сил трения. Применение же законов статики к решению практических задач о равновесии механических систем без учета сил трения может привести к результатам, мало соответствующим действительности.
Силы трения существенно отличаются от всех других сил. Они возникают в тех случаях, когда активные силы способны создать относительное движение соприкасающихся тел. Не останавливаясь подробно на вопросах о происхождении и физической природе сил трения, ограничимся лишь изучением некоторых их свойств и тон роли, которую они играют при исследовании равновесия и движения механических систем.
Силы трепня в статике будем определять в соответствии с законами Амонтона—Кулона, сущность которых была изложена выше. Это грубое предположение достаточно хорошо согласуется с экспериментальными данными.
Аналитический метод решения задач статики при наличии сил трения сохраняется таким же, как и при отсутствии сил трения, но из-за того, что силы трения не определяются однозначно, условия равновесия при наличии сил трения выражаются неравенствами. Это говорит о том, что при наличии трения существует не одно, а целое множество смежных положении равновесия исследуемой системы. Задача о равновесии сводится теперь к отысканию Гранин области равновесия.
Рассматривая абсолютно твердые и идеально гладкие тела, мы предполагали, что два тела, находящиеся в равновесии, могут соприкасаться друг с другом в одной точке и свободно скользить одно относительно другого. Такое предположение противоречит опытным данным. Реальные тела не являются ни абсолютно твердыми, ни абсолютно гладкими. В действительности соприкосновение тел никогда не происходит в одной точке, ибо соприкасающиеся тела испытывают деформации и, как бы малы ни были последние, соприкасание тел происходит по некоторой площадке, размерами которой обычно пренебрегают.
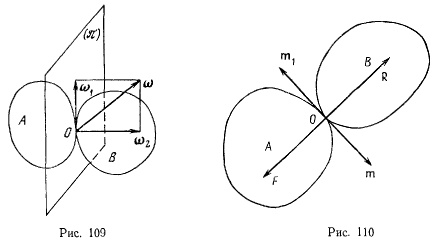
Рассмотрим два твердых тела А и В, находящиеся в соприкосновении, и пусть О —точка контакта (рис. 109). Мгновенное движение тела В относительно тела А всегда может быть сведено к мгновенно-поступательному движению с относительной скоростью  точки О тела B и к мгновенно-вращательному движению тела В с относительной угловой скоростью
точки О тела B и к мгновенно-вращательному движению тела В с относительной угловой скоростью  линия действия которой проходит через точку О. Вектор можно представить в виде суммы двух векторов
линия действия которой проходит через точку О. Вектор можно представить в виде суммы двух векторов

причем  лежит в общей касательной плоскости
лежит в общей касательной плоскости  ортогонален к плоскости
ортогонален к плоскости  Вектор будем называть вектором скорости качения, а вектор
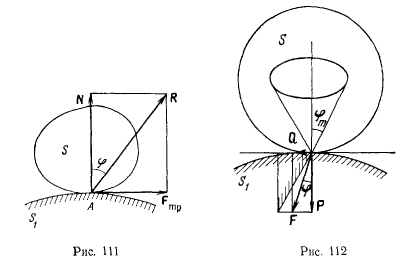
Вектор будем называть вектором скорости качения, а вектор  — вектором скорости верчения тела. Мгновенное движение тела В относительно тела А теперь можно представить как совокупность трех движений: скольжения, качения и верчения. Совокупность действующих на находящееся в равновесии тело В активных сил может быть приведена к одной результирующей силе F, линия действия которой проходит через точку О, и паре с моментом m. Действие этой системы сил уравновешивается силами реакций со стороны тела A, которые таким образом сводятся к результирующей силе R, линия действия которой совпадает с линией действия силы F, и результирующей паре с моментом
— вектором скорости верчения тела. Мгновенное движение тела В относительно тела А теперь можно представить как совокупность трех движений: скольжения, качения и верчения. Совокупность действующих на находящееся в равновесии тело В активных сил может быть приведена к одной результирующей силе F, линия действия которой проходит через точку О, и паре с моментом m. Действие этой системы сил уравновешивается силами реакций со стороны тела A, которые таким образом сводятся к результирующей силе R, линия действия которой совпадает с линией действия силы F, и результирующей паре с моментом  (рис. 110), удовлетворяющих условиям
(рис. 110), удовлетворяющих условиям

Разложим силу R и момент пары  на составляющие,расположенные в плоскости
на составляющие,расположенные в плоскости  и ортогональные к ней
и ортогональные к ней

Составляющую  направленную по нормали к соприкасающейся плоскости назовем нормальной реакцией. Эта сила препятствует взаимному проникновению тел. Составляющую
направленную по нормали к соприкасающейся плоскости назовем нормальной реакцией. Эта сила препятствует взаимному проникновению тел. Составляющую  лежащую в плоскости будем называть силой трения скольжения, или просто трением скольжения. Эта сила препятствует проскальзыванию тела В по телу A. Составляющую
лежащую в плоскости будем называть силой трения скольжения, или просто трением скольжения. Эта сила препятствует проскальзыванию тела В по телу A. Составляющую  ортогональную к плоскости и препятствующую верчению тела, назовем парой трения верчения. Наконец, составляющую
ортогональную к плоскости и препятствующую верчению тела, назовем парой трения верчения. Наконец, составляющую  параллельную плоскости и препятствующую качению тела, назовем парой трения качения. Заметим, что влияние пар
параллельную плоскости и препятствующую качению тела, назовем парой трения качения. Заметим, что влияние пар  вообще очень мало по сравнению с влиянием сил
вообще очень мало по сравнению с влиянием сил  поэтому рассмотрим сначала те задачи, в которых этими парами можно пренебрегать.
поэтому рассмотрим сначала те задачи, в которых этими парами можно пренебрегать.
Хотя реальные тела не являются абсолютно твердыми и в общем случае касание тел А и В происходит по некоторой площадке, тем не менее в ряде задач можно пренебречь размерами этой площадки и с достаточной степенью точности считать тела А и В абсолютно твердыми, а их касание происходящим в одной точке. Кроме того, будем предполагать, что со стороны тела В на тело А действует рассмотренная выше система сил.
Пусть тело S под действием активных сил находится в равновесии на поверхности Si, касаясь последней в точке А (рис. 111). Действующая на тело S со стороны поверхности  полная реакция R складывается из нормальной реакции N и силы трения
полная реакция R складывается из нормальной реакции N и силы трения  Направление последней заранее неизвестно, а максимальное значение, определенное в соответствии с законом Амонтона—Кулона,
Направление последней заранее неизвестно, а максимальное значение, определенное в соответствии с законом Амонтона—Кулона,  — коэффициент трения скольжения. Угол
— коэффициент трения скольжения. Угол  между направлениями полной реакции R и нормальной реакции N
между направлениями полной реакции R и нормальной реакции N
никогда не превосходит угла трения  который определяется из условия
который определяется из условия
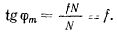
Для равновесия тела S необходимо, чтобы уравновешивались все силы, действующие на тело S. Последнее возможно лишь в случае, когда все действующие на тело силы приводятся к одной равнодействующей силе F, линия действия которой проходит через точку Л, по величине, равной силе реакции R и противоположной по направлению. Сила F должна «прижимать» тело S к поверхности и образовывать с нормалью к поверхности угол, меньший угла трения.
Эти необходимые условия оказываются и достаточными, так как если они выполнены, то равнодействующую силу F можно разложить на составляющие: нормальную Р и касательную Q (рис. 112). Сила Р уравновешивается силой нормальной реакции N, так что  Сила
Сила  не может вызывать скольжения тела S по поверхности поскольку она остается меньше максимальной силы трения
не может вызывать скольжения тела S по поверхности поскольку она остается меньше максимальной силы трения
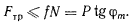
Можно придать условиям равновесия и геометрическую интерпретацию. Для этого достаточно рассмотреть конус вращения с углом при вершине  вершина которого совпадает с точкой А, а ось направлена по нормали к поверхности Необходимые и достаточные условия равновесия сводятся к тому, что равнодействующая активных сил проходит через точку А и лежит внутри этого конуса. Рассмотренный А конус принято называть конусом трения
вершина которого совпадает с точкой А, а ось направлена по нормали к поверхности Необходимые и достаточные условия равновесия сводятся к тому, что равнодействующая активных сил проходит через точку А и лежит внутри этого конуса. Рассмотренный А конус принято называть конусом трения
Следствие. Равнодействующая активных сил, проходящая внутри конуса трепня, не может вызвать движения тела, как бы велика она ни была.
Как бы ни была мала равнодействующая активных сил, не лежащая внутри конуса трения, она не может быть уравновешена силами трения и сообщает телу движение.
Замечание. Коэффициент трения зависит от направления касательной к поверхности так что конус трения вообще не является прямым круговым конусом.
Пример:
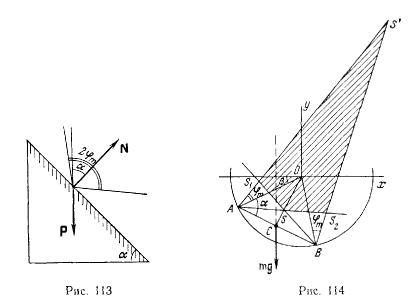
Тяжелая материальная точка находится на шероховатой наклонной плоскости, составляющей угол а с горизонтом (рис. 113). Найти условия равновесия точки.
Решение:
Точка будет находиться в равновесии лишь тогда, когда линия действия силы тяжести будет проходить внутри угла трения, т. е. при выполнении неравенства 
Пример:
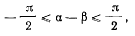
Тяжелая однородная палочка АВ длиной  может скользить своими концами по шероховатой окружности (угол трения равен
может скользить своими концами по шероховатой окружности (угол трения равен  плоскость которой вертикальна (рис. 114). Определить условия равновесия палочки.
плоскость которой вертикальна (рис. 114). Определить условия равновесия палочки.
Решение:
На палочку действуют три силы: сила тяжести и силы реакции в точках А и В расположенные внутри соответствующих углов трения. Под действием трех сил палочка будет находиться з равновесии, если эти силы пересекаются в одной точке, а силовой треугольник замкнут.
Построим в точках А и В углы трепля  Получим часть плоскости
Получим часть плоскости  заключенную внутри того и другого угла. Первое из условий равновесия может быть выполнено лишь в случае, когда линия действия силы тяжести пересекает фигуру Аналитически это условие можно записать в виде
заключенную внутри того и другого угла. Первое из условий равновесия может быть выполнено лишь в случае, когда линия действия силы тяжести пересекает фигуру Аналитически это условие можно записать в виде

где  — абсцисса центра палочки. Обозначив через
— абсцисса центра палочки. Обозначив через  угол между горизонтальным радиусом окружности и прямой OA, соединяющей центр окружности с центром палочки, а через а —угол между прямой АО и палочкой, и опуская у
угол между горизонтальным радиусом окружности и прямой OA, соединяющей центр окружности с центром палочки, а через а —угол между прямой АО и палочкой, и опуская у  индекс
индекс  полученное условие представим в виде
полученное условие представим в виде

откуда окончательно получаем условия равновесия

Условия (b) определяют не одно положение равновесия, а целую область возможных положений равновесия. Условия эти являются и достаточными. В самом деле, перенося силу  в произвольную точку заштрихованной области, заметим, что эта сила всегда может быть уравновешена силами реакции.
в произвольную точку заштрихованной области, заметим, что эта сила всегда может быть уравновешена силами реакции.
В частном случае при  условие (b) становится особенно наглядным
условие (b) становится особенно наглядным

откуда следует
или

Если трение отсутствует, т. е.  условие (b) сводится к уравнению
условие (b) сводится к уравнению
которое преобразуется к виду

Последнее уравнение определяет единственное положение равновесия, соответствующее горизонтальному положению палочки.
При налнчи сил трения задача определения положения равновесия и сил реакций однозначно не разрешается.
Замечание о трении качения
Как уже отмечалось, трение качения возникает при качении одного тела по другому. Возникновение этого трения можно грубо объяснить тем, что поверхности соприкасающихся тел не являются абсолютно твердыми и несколько деформируются. Законы трения качения, основанные на этом предположении Кулоном и Мореном, представляют грубое приближение к действительности.
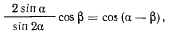
Рассмотрим в качестве примера задачу о качении колеса по прямолинейному горизонтальному рельсу, предполагая, что кроме силы тяжести на колесо действует еще некоторая система сил, расположенных б плоскости колеса. Действующие силы вообще несколько деформируют как само колесо, так и рельс, и для возможности качения по «рельсу необходимо приложить некоторое усилие. Возникающее сопротивление свободному качению обычно и называют трением качения. Такое объяснение явления трения
связано с отказом от гипотезы абсолютно твердого тела, что вызывает необходимость пересмотра основных принципов статики твердого тела, в основе которых лежит эта гипотеза. Поэтому, сохраняя гипотезу абсолютно твердого тела, будем предполагать, что соприкасание тел происходит в одной точке и всякие деформации тел отсутствуют. Обозначим через Л точку касания колеса и плоскости (рис. 1)5). Приводя систему сил, действующих на колесо, к точке А, в общем случае получим результирующую силу F и пару сил с моментом m, перпендикулярным к плоскости колеса. Раскладывая силу  нормальную к рельсу, и
нормальную к рельсу, и  параллельную рельсу, заметим, что сила будет вызывать скольжение колеса, а пара — его вращение. Для отсутствия скольжения достаточно выполнения неравенства.
параллельную рельсу, заметим, что сила будет вызывать скольжение колеса, а пара — его вращение. Для отсутствия скольжения достаточно выполнения неравенства.

где  — коэффициент трения скольжения. При выполнении этого условия колесо еще не будет находиться в равновесии, пока не уравновешена пара. Опыт показывает, что колесо не начнет катиться до тех пор, пока момент пары т не превзойдет некоторого предельного значения
— коэффициент трения скольжения. При выполнении этого условия колесо еще не будет находиться в равновесии, пока не уравновешена пара. Опыт показывает, что колесо не начнет катиться до тех пор, пока момент пары т не превзойдет некоторого предельного значения

Величина  называется коэффициентом трения качения. Этот коэффициент не зависит от величины силы F и радиуса кривизны
называется коэффициентом трения качения. Этот коэффициент не зависит от величины силы F и радиуса кривизны
катящегося предмета, а зависит лишь от физических свойств соприкасающихся тел. Обычно вводится гипотеза, что кроме активных сил на твердое тело действуют нормальная сила реакции N, уравновешивающая действие силы  сила трения скольжения» уравновешивающая действие силы и пара сил, называемая парой трения качения, которая уравновешивает пару с моментом m. Для равновесия достаточно выполнения двух неравенств
сила трения скольжения» уравновешивающая действие силы и пара сил, называемая парой трения качения, которая уравновешивает пару с моментом m. Для равновесия достаточно выполнения двух неравенств

Заметим, что в большинстве случаев трение качения оказывается значительно меньшим, чем трение скольжения, и при решении практических задач им часто можно пренебрегать.
Замечание о трении верчения
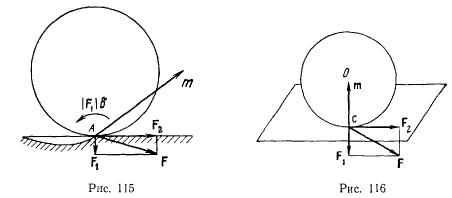
Рассмотрим тяжелый шар, лежащий на горизонтальной плоскости и касающийся ее в точке С (рис. 116), так что СО — вертикальный радиус шара. Вращение шара вокруг вертикального радиуса называют верчением. Приводя систему активных сил, действующих на шар, к точке С, в общем случае получим результирующую силу, проходящую через точку С, и пару с моментом т. Предположим, для простоты, что момент пары параллелен вертикальному радиусу шара. Раскладывая, как это уже делалось выше, результирующую силу на составляющие, одна из которых параллельна горизонтальной плоскости, а вторая ей ортогональна, заметим, что сила уравновешивается нормальной реакцией плоскости, сила — силой трения скольжения, и для полного равновесия шара необходимо еще уравновесить пару. Как известно из опыта, если момент пары, стремящийся привести шар в верчение, достаточно мал, то шар вертеться не начнет. Действию активной силы в этом случае препятствует некоторая пара сил реакций, называемая трением верчения. Предельный момент трения верчения можно представить в виде произведения некоторого коэффициента /г, называемого коэффициентом трения верчения и определяемого экспериментально, на нормальную составляющую результирующей активной силы, т. е.  Коэффициент трения верчения обычно величина малая, в 5—10 раз меньшая коэффициента трения качения. Условия равновесия сводятся к двум неравенствам:
Коэффициент трения верчения обычно величина малая, в 5—10 раз меньшая коэффициента трения качения. Условия равновесия сводятся к двум неравенствам:

Эта лекция взята со страницы, где размещены все лекции по предмету теоретическая механика:
Предмет теоретическая механика
Эти страницы возможно вам будут полезны:
| Задача о равновесии несвободного твердого тела |
| Частные случаи равновесия твердого тела |
| Сила тяжести и центр тяжести |
| Работа силы на перемещении |
