
Оглавление:


Вспомогательные сведения из геометрии. Переменные, определяющие положение подвижного триэдра относительно неподвижного триэдра с той же вершиной
- Рассмотрим прямоугольный неподвижный трехгранный Ox и прямоугольный подвижный трехгранный Oxyz. Они имеют ту же ориентацию, что и фиксированная. Предположим, что ось x преобразуется в ось y поворотом на 90 в положительном направлении, вокруг оси z, как в трехгранном bodies. Аналитическая геометрия, положение трехгранного тела Oxyz обычно определяется 9 косинусами, образующими оси Oz и Ox. Существует 6 известных соотношений между этими 9 косинусами, поэтому правильно выбранные 3 косинуса можно считать произвольными. Из этого ясно, что эти 9 косинусов могут быть выражены как функции 3 независимых параметров.
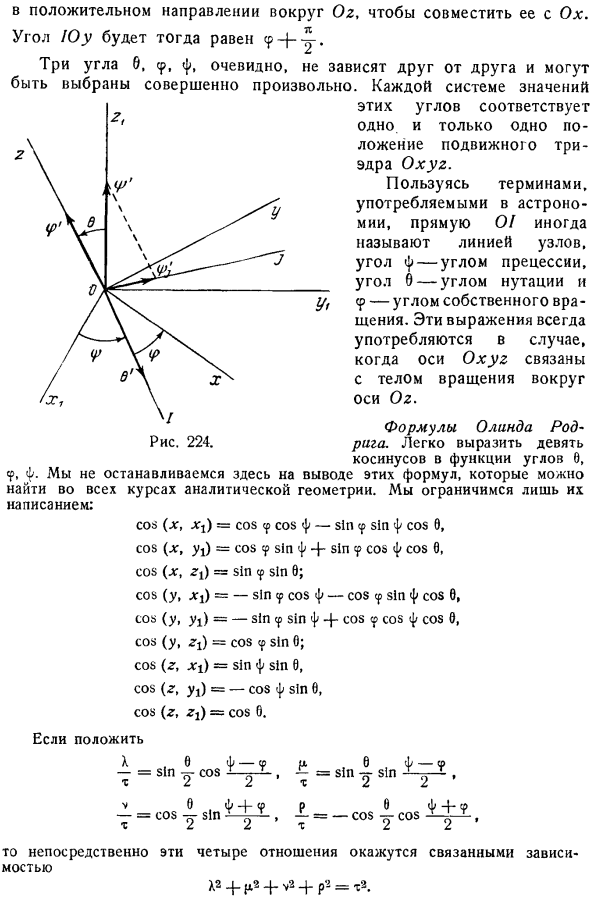
Наиболее часто используемыми переменными в механике являются углы Эйлера, а в современной геометрии параметры Олинда Родригеса и вытекающие из них параметры. Углы Эйлера. 01 рис. 224 пересечение плоскостей xy и xtyt. Мы произвольно выбираем положительное направление 01 На этой прямой и в обозначаем угол между ней и направлением Oxx, а в направлении положительного поворота от Oxx до O считаем этот угол положительным Вокруг ОзВ 01 перпендикулярно плоскости зозв. Если угол между Od1 и Oz равен 0, положительное направление вращения от Ozt до Oz считается положительным около 01.Ось Oz перпендикулярна плоскости 10 X.
Точно так же можно доказать, что: Момент инерции системы относительно плоскости равен моменту инерции относительно параллельной плоскости, проходящей через центр тяжести, увеличенному на произведение всей массы на квадрат расстояния между обеими плоскостями. Людмила Фирмаль
Пусть LeT это угол, под которым вам нужно повернуть линию 01 в положительном направлении вокруг Oz, чтобы она была объединена с Oh. Угол 10u будет равен+ Очевидно, что 3 угла 6 p, PHI независимы друг от друга и могут быть выбраны совершенно произвольно. Каждая система ценностей y, f. It s в орфографии Эти углы соответствуют только 1 положению движущегося Трехгранника Oxyz. Используя терминологию, используемую в астрономии, линию 01 иногда называют линией узла, а угол углом прецессии, угол 0 углом сочленения, а p углом правильного вращения. Эти выражения всегда используются, когда ось Oz связана с вращающимся телом вокруг оси Oz. Олинда род такелаж формула.
- Легко представить 9 косинусов в виде функции угла O. На этом вывод этих формул, которые можно использовать во всех курсах аналитической геометрии, не заканчивается. Мы ограничиваемся только ими потому что Х, Х = потому что = потому что Син Р СР грех, потому что 0, что Х, в YJ = со СР грех SinФ4 грех, потому что с 0, что Х, бу ZJ = Грех Грех Грех СР СР 0 Потому что г, ХГ = Син cosф потому что СР СР sinФcos 0, потому что г, в YJ = Син СР sinф4 потому что СР cosфcos 0, потому что г, то ZJ = со СР грех 0 потому что з, Си sin sin 0, потому что з, ю = cos sin 0 Потому что З, от ZJ Косинус 0 Если вы положите его в Х, 6 ф ср. 0. Ф см. =sin y cosГ, Г= sin J sin L t, v 0.
Ф4 вода r 0Ф4 у = COS г грех Т 2 Т= Г, потому что Эти 4 отношения непосредственно связаны Х2 2 4 П2 4.p2×3. Если вы выражаете 9 косинусов в функции 4 отношений и используете последнее отношение для исключения m2, вы получаете выражение. Родригес, h X2 f 2 v24 p2 COS X, X, + p + p3. 2 хр. .п со х У1 2 Х2 + fjt2 + + Р2.
Таким образом, в рассматриваемом случае момент инерции вычисляется с помощью простого интеграла. Изменение момента инерции системы относительно оси, перемещающейся параллельно самой себе. Людмила Фирмаль
Косинус Х, З ++.2 + Р3 И 6 других подобных формул, которые определяют 9 косинусов в виде рациональной функции 3 параметров, являются отношением 3 величин X, x, 4 минут L3. Однако, идя дальше, мы можем упростить более классическую формулу, которая описывает координаты точки относительно неподвижной точки Ось, проходящая через координаты x, y и z одной и той же точки для оси Oxyz. По этой причине было введено 4 количества И 4B. Ф ф. 1 2 0 L, 2, 0 А = Е, потому что г и B = Ле грех О 6 с = Ле грех, то Д = = Е COS в г Связанный рекламой be 1.
Тогда мы можем показать, что Формула преобразования координат сводится к той же линейной подстановке АУ Джей Б г АУ Ф б Си си 4 4 Он выполняется одновременно для 2 х величин и И и. Для получения информации о формуле Олинда Родригеса см. Примечание о лимонах де Синематика в Кениге, в частности Дарбу, в конце книги. Кроме того, что касается приведения формулы преобразования координат к линейной подстановке, та же книга p Кенига.337, Кляйн и Зоммерфельд Sommerfeld, Uber die Theorie des Kreisels, chap. I и Лакур, ссылаясь на ту же книгу о Nouvelles. Анналес де Math6matique, 3 серия, вып.
Смотрите также:
Теоретическая механика — задачи с решением и примерами
Если вам потребуется заказать теоретическую механику вы всегда можете написать мне в whatsapp.
