
Оглавление:


Волновые зубчатые передачи. общие сведения, кинематика
- Волновая зубчатая передача. Общая информация, кинематика Все рассмотренные ранее передачи представляют собой механизмы с жесткими связями. Передача волны гибкая связь 1.It содержит в себе 1, пояс и цепь пояса и цепной перевозки можно использовать как гибкое соединение, по мере того как оно не повлияет на коэффициент шестерни, вернее чем гибкое соединение., Механическая передача 165в вид передачи планетарной шестерни, в этом одно колесо сделано тонкостенного кольца шестерни, не похож на другое, оно вызвано
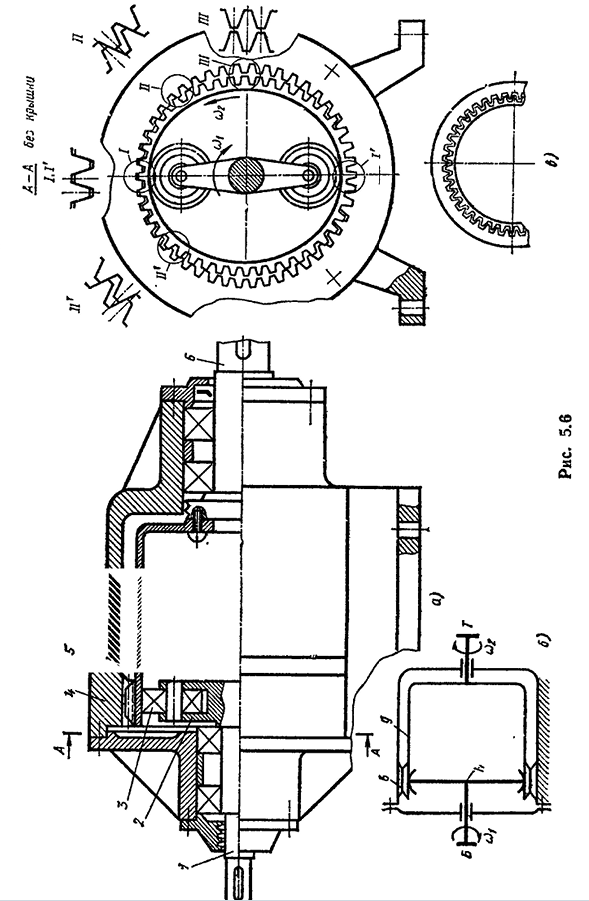
гибким колесом. Рассмотрим поведение распространения волн на примере простейшей одноступенчатой коробки передач. 5.6, а и кинезиологическая схема-на рисунке. 5.6, б.волновая передача состоит из трех основных звеньев: жесткого колеса 4 (Б)с внутренними зубьями(в данной конструкции жесткое колесо представляет собой единое целое с корпусом из высокопрочного чугуна гибкое колесо 5 соединено с ведомым валом 6. Третьим звеном является генератор волн н, в состав которого входит несущая 2, оба конца которой установлены на двух шарикоподшипниках 3.
Привод 2 выполнен одновременно с ведущим валом/и имеет вал, общий с Людмила Фирмаль
ведомым валом 6. На обоих колесах вырезаны зубья с одинаковым модулем; число зубьев не одинаково:у гибких колес меньше зубьев, чем у жестких. Число зубьев жесткого колеса обозначается индексом B, то есть zb, а гибкого-индексом g, то есть zg. Разница между Zb-zg может быть равна 1, 2, 3, 4. Разница в количестве зубьев на колесе волновой передачи принимается равной, или если число волн кратно числу=zb-zg. На самом деле, наиболее распространенная передача, которая имеет разницу в количестве зубьев(и количестве волн), равна двум, т. е. W-zb-zg=2. В этой книге рассматриваются двухволновые
передачи. Следовательно, если число зубьев на колесах с одним и тем же модулем различно, следовательно, диаметр деления этих колес будет различным, особенно db>dg. В свободном состоянии генератор отсутствует(см. диаграмму. 5.6, b), колеса находятся в концентрическом положении с равномерным зазором между зубьями жесткости b и гибким колесом G. При установке внутри гибкого колеса генератора (см. Вид а без крышки) последнее деформирует гибкое колесо радиально и придает ему овальную форму. При входе в зацепление зубья касаются одной поверхности (тип II) на выходе,
- совершая рабочий ход 166 стр. 5.6 CR / iyi i) (холостой ход) — в контакте с другими поверхностями (тип II’). При вращении генератора h происходит относительное вращение колес g и B, по которому зубья колеса g должны проходить от впадины другого колеса. За четверть оборота генератора зуб перемещается из положения i i i i i в положение I. Когда колесо b неподвижно, гибкое колесо g совершается в движении генератора на полшага, а при полном вращении генератора передача относительного движения двух стивидорных колес, для эффекта клина, сопровождается скольжением зубьев. В мыслимой конструкции волнового редуктора основным элементом является генератор h, который имеет фиксированную жесткость S, т. е. трансмиссия типа h—b—g 5.1 с ведомым гибким колесом g, a).
Сравнение планет и волн(рис. 5.6) трансмиссия, отметим следующие общие характеристики: обе трансмиссии-четырехзвенный механизм B\link b колесо g намотано на колесо. Однако это определение, несмотря на отмеченное сходство, в структуре распространения волн состоит в том, что отсутствует связь с планетарным движением при передаче волн, что является основной особенностью распространения волн. 5.6 планетарное движение делает видеогенератор, но это не единственная деталь генератора с кинематической связью. Генератором может быть все, что не имеет частей планетарного движения, таких как кулачки, электромагнетизм и т. д. В планетарной передаче ось колеса
G не совпадает с осью трансмиссии, колесо G катится по колесу B как жесткое тело. В этом случае он Людмила Фирмаль
вращается вокруг своей оси, а вместе с ней вращается и вокруг оси передачи, то есть совершает планетарное движение. В волновой передаче ось колеса g совпадает с осью передачи. Ход колеса g по колесу b осуществляется в результате деформации волны 168колеса г. Движение планет в этом случае отсутствует. Отношение передачи волны от быстрого вала с неподвижным жестким колесом к медленному принимает вид ubhg= = = — GE/(GE-GE)= — zg / W. (5.10)учитывая dg=zgm и db=zbm, передаточное отношение может быть определено как= — dg/(db-dg). Знак минус уравнения указывает,
что ведущее звено и ведомое звено вращаются в противоположных направлениях. Как показывает практика, оптимальным критерием эффективности является трансмиссия с числом зубьев гибкого колеса zg=140…600 в то же время, в наиболее распространенном варианте волнового числа W=2, одноступенчатый коэффициент передачи находится в диапазоне I-70…400. Обратите внимание, что эти значения и КПД передачи находятся в пределах 0,75…При таких значениях и одноступенчатая передача является главным
качественным показателем зубчатой передачи, ее предпочтительно отличать от других зубчатых передач, в том числе и планетарных. Это 25 в то же время занимается передачей волн…30% от общего числа зубьев пары зубьев колес, что обеспечивает высокую кинематическую точность и высокую грузоподъемность на единицу массы при низкой точности изготовления по сравнению с обычными зубчатыми колесами. Поэтому волновая передача наиболее полно отвечает требованиям снижения металлоемкости машины. Волновая передача характеризуется высокой плавностью и бесшумностью в
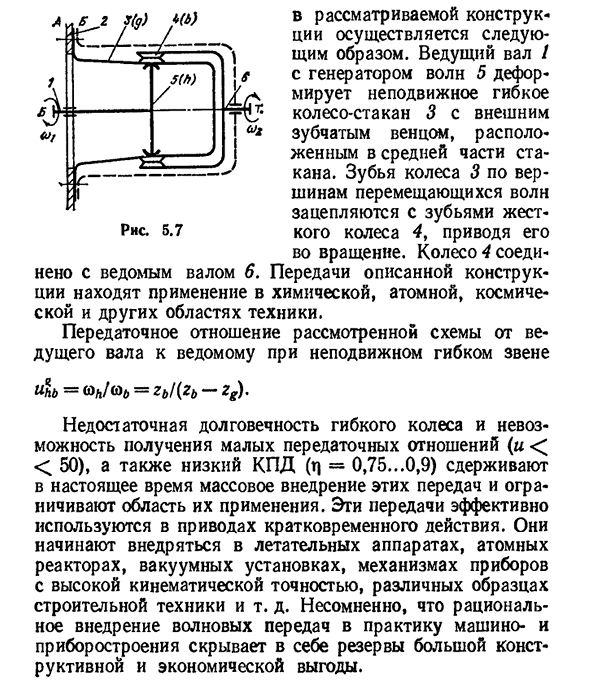
работе. Из-за симметрии конструкции при передаче нагрузки на вал и опору она уменьшается. Среди основных преимуществ волновой передачи-возможность передачи механического движения в герметичное пространство или агрессивную среду. Для риса. Возможна передача вращательных движений из среды a в агрессивное (безвоздушное) пространство B кинематическая схема герметичного волнового редуктора является глухой и гибкой, поэтому пустота A надежно изолирована от окружающей среды B. передача крутящего момента Одна тысяча шестьсот девяносто шесть В рассматриваемой конструкции она осуществляется следующим образом. Приводной вал с генератором волн 5 1 преобразует
неподвижное гибкое колесное стекло 3 с внешним зубчатым венцом, расположенным в средней части стекла. Зубья колеса 3 в верхней части движущейся волны сцепляются с зубьями жесткого колеса 4 и вращаются. Колесо 4 соединено с приводным трансмиссионным валом описанной конструкции и используется в химии, ядерной, космической и других областях техники. Отношение рассматриваемой схемы от ведущего вала к ведомому в неподвижном гибком звене Uhb=Wft/W*=zb/(zb-GE). Недостаточная долговечность гибкого колеса, малое передаточное отношение (и<<50), низкий КПД
(Т/=0,75) не могут быть получены…0.9) ограничить текущее массовое развертывание этих передач и сферу их применения. Эти передачи эффективно используются в приводах короткого действия. Они начинают внедряться в самолетах, ядерных реакторах, вакуумных установках, механизмах устройств с высокой кинематической точностью, различных образцах строительной техники и др. При рациональном внедрении механического и инструментального кожного резерва осуществляется волновая передача
Смотрите также:
