
Оглавление:



Важный частный случай, когда работа реакций связей равна нулю
- Если связь не зависит от времени, т. е. 176, то существуют только координаты точек системы, а время представлено уравнением, которого не существует, и далее, если связь идеальна. То есть трение, то сумма основных действий реакционной связи на фактическое перемещение, осуществляемое системой на самом деле, при указанных условиях фактическое перемещение системы явно допускается связями, и сумма откликов связей будет равна нулю п. 162. Следовательно, существует теорема. Если связь не зависит от времени и трения нет, то разница в кинетической энергии будет равна сумме основной работы данной силы.
В некоторых случаях можно считать, что сумма элементарных операций данной силы относительно действительного перемещения является полной производной некоторых функций U от координат точек системы. Тогда теорема о кинетической энергии приводит к следующему уравнению: У + ч Второй из них энергетический Интеграл. Примечание I. полная связь без зависимости от времени и трения С. 168 если существует система, то теорема о кинетической энергии дает свои собственные уравнения движения directly.
Можно также сказать, что если среди всех кривых, идущих от точки А к точке В, отыскивать кривые, для которых действие имеет минимум, то эти кривые среди траекторий, соединяющих точки А и В. Людмила Фирмаль
Дело в том, что положение системы зависит только от 1 параметра, а теорема о кинетической энергии позволяет создать уравнение, содержащее только заданную силу и позволяющее вычислить 1 параметр с помощью функции времени I. Примечание P. Если часть связи зависит от времени, то задача соответствующей реакции связи на фактические движения обычно не равна нулю. Простой пример этого движение точки, которая скользит по движущейся кривой без трения. Работа коммуникативной реакции на фактическое движение не равна нулю пункт 258. Да. Приложение. Тот Же Американец 191. Скольжение тяжелой цепи припоя Трение вдоль фиксированной кривой отсутствует.
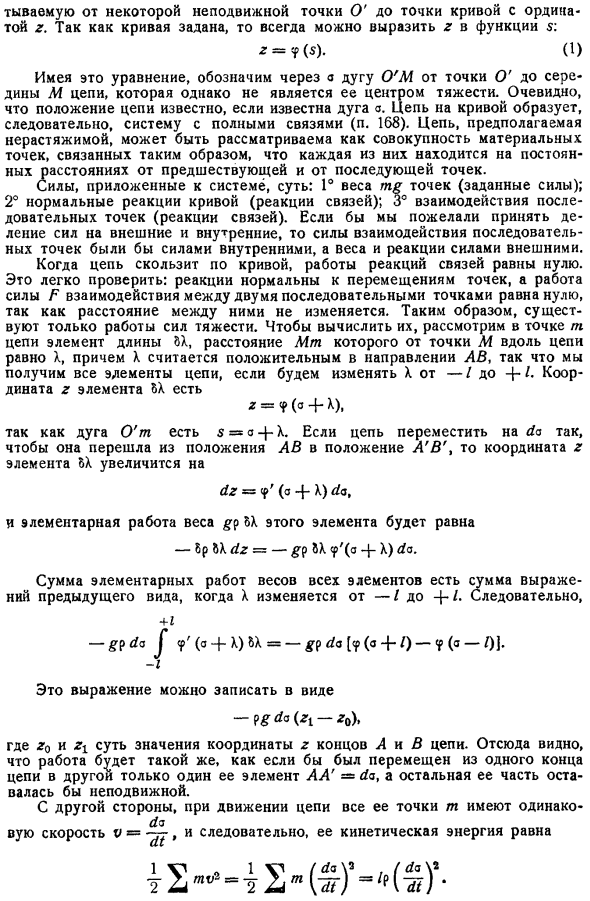
Возьмем 2 как длину цепи AB, а p как массу единицы длины, и, следовательно, 2 p Как массу целого. Ось OZ рис. 191J, вертикальная линия вверх. Длина дуги фиксированной кривой, по которой скользит цепь, Здесь необходимо понимать те связи, которые не сопротивляются движению за счет бесфрикционного сцепления. Например, они не только гладкие, но и имеют шероховатую поверхность, если по ним происходит нескользящая прокатка. Примечание, перевод от фиксированной точки O до точки кривой в ординате r. учитывая кривую, вы всегда можете представить z в функции. =. 1 Это выражение используется для обозначения дуги O M от точки O до середины M цепи, но это не ее центр тяжести.
Очевидно, что если известна Дуга a, то положение цепи равно known. So, цепь на кривой образует систему с полным соединением пункт 168.Предполагается, что цепь нерастягиваема и может рассматриваться как ряд важных точек, соединенных так, что каждая из них находится на определенном расстоянии от предыдущей и следующей точек. Силы, приложенные к системе: G вес MG точек заданная сила. 2 стандартная кривая реакции реакция связи 3 взаимодействие последовательных точек реакция связи. Если мы хотим принять разделение сил на внешнюю силу и внутреннюю силу, то сила взаимодействия последовательных точек будет внутренней силой, а вес и реакция будут внешней силой.
Когда цепь скользит по кривой, работа реакции связывания равна нулю. Это легко проверить. Реакция перпендикулярна смещению пятна, и сила взаимодействия между двумя последовательными точками F равна нулю. И это неудивительно, ведь расстояние между ними не меняется. Поэтому только действие гравитации exists.
To вычислите их в точке m цепи, рассмотрите элемент длины BX, где расстояние Mt от точки M вдоль цепи равно X, рассмотрите X как положительное в направлении AB и измените X от I до+1, чтобы получить все элементы цепи. Z координата элемента ВХ З = СР 4 х Поскольку дуга O t равна = o4 X. Когда цепь перемещается в da и из AB в позицию A B, z координата элемента BX увеличивается ДЗ = р 4 х да И основная задача этого элемента вес gpBX 6р ВК ДЗ = г ВХ р а j х да. От I до I. сумма основной работы весов всех элементов есть сумма выражений предыдущего form. So … +1 др с J Р А 4 х ВХ = ГП да СР а 4 я у КТ. Я.
Это выражение может быть записано как п РФО ЗТ З0 Где Zq и Zi значения координат z концов цепи, A и B. Это показывает, что только 1 элемент AA = da перемещается с одного конца цепи на другой и ведет себя так же, как если бы остальные не двигались. С другой стороны, когда цепь движется, все ее точки m будут одинаковыми Скорость V= , следовательно, его кинетическая энергия будет: уравнение кинетической энергии принимает вид: ПП Р А 4 а. Эта формула показывает, что t может быть представлена функцией a, используя только 2 квадратуры.
Если обе части разделить на dt, а указанный дифференциал выполнить, то получим следующее уравнение: а В + Г Р М 0 9Н д и 21 в Он аналогичен уравнению линейного движения точек под действием силы, которая зависит только от position. As проверка, предел может быть достигнут, если длина цепи I стремится к нулю. Затем с правой стороны появляется ограничение gy a , и снова берется уравнение движения упора вдоль неподвижной кривой. Поскольку уравнения движения цепи зависят только от функции p, движение не изменяется, если цилиндр, проецирующий определенную кривую на горизонтальную плоскость, помещен в одну из плоскостей своей касательной плоскости.
Один. Есть 2 случая, в которых центральное движение цепи не зависит от ее длины. 1.Данная кривая представляет собой спираль, проведенную по вертикали cylinder. In это дело р х = а Где a константа, а уравнение 2 сводится к уравнению вида: Вот и все. Она независима от И. 2.Данная кривая может быть циклоидой с вертикальной осью или может быть получена путем ввинчивания этой циклоиды в вертикаль cylinder. In этот случай, известный 250 = Г Таким образом, уравнения движения в середине м цепи могут иметь вид: Л 4 В обоих случаях середина M движется по фиксированной кривой как точка изолированного тяжелого материала P u i S e and x, Journal de Liouville, vol. VIII.
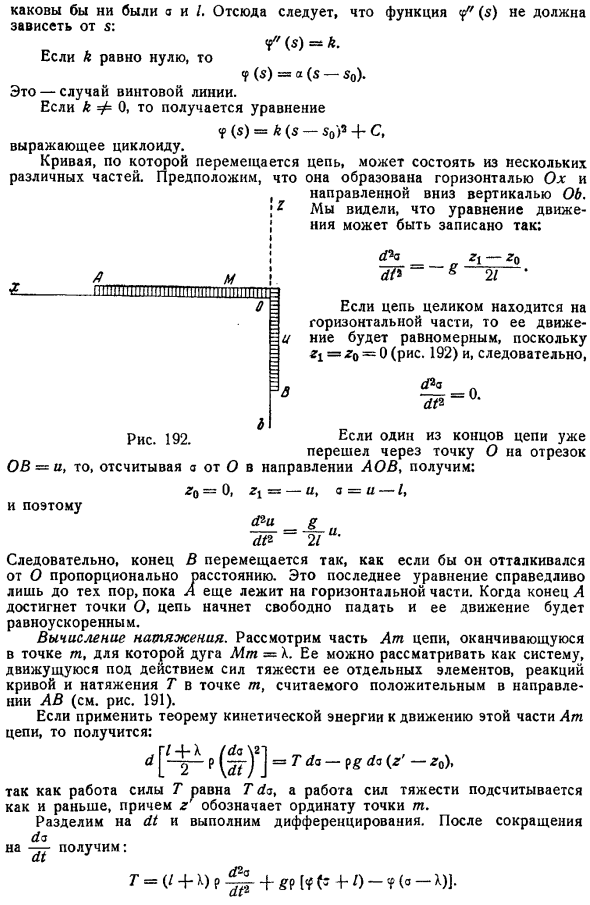
- Однако оба типа функций, указанных здесь, являются единственными с такими properties. In факт, если уравнение движения не зависит от Ф 0 Л 0 м а 0 в Пятьдесят семь Теперь, освободившись от знаменателя, мы различаем 2 части 2 раза. Что взять +0 О=о, a и I. В любом случае функция ы не должна зависеть от s. = если K равно нулю СР 5 = а Х 0. Это спиральный случай. если k = = 0, получим уравнение = Ф З. Он выражает циклоиду. Кривые, по которым движутся различные детали. Предположим, что Цепь может состоять из нескольких звеньев, образованных горизонтальным волом и направленных вниз вертикальным об.
Мы обнаружили, что уравнение движения можно описать следующим образом: Если цепь находится в полностью горизонтальной части,= = z0 = 0 рис. 192, то ее движение будет равномерным, и поэтому =0.ст2 Если один из концов цепи уже прошел точку O и достиг отрезка OV то отсчет от O до a в направлении AOW будет выглядеть так: r0 = 0, Zi = u, a = u I, таким образом = У. и 21 В результате ребро B движется как бы отталкиваясь от О пропорционально расстоянию.
Кривые, соединяющие две неподвижные точки А и В и обладающие тем свойством, что вариация действия равна нулю при переходе от одной из этих кривых к любой другой, бесконечно близкой и проходящей через те же точки, являются траекториями, которые фактически опишет материальная точка, начавшая движение из одной из этих неподвижных точек в таком направлении, что она приходит во вторую. Людмила Фирмаль
Это последнее выражение действительно до тех пор, пока A все еще находится в горизонтальной части. Когда конец а достигает точки о, цепь начинает свободно падать, и ее движение ускоряется одинаково. Расчет натяжения. Рассмотрим часть Am цепи, которая заканчивается в точке m, где дуга Mm = X. действие силы тяжести отдельных элементов можно рассматривать как систему, которая движется под действием кривой и натяжения T в точке m. 191. Применяя теорему о кинетической энергии к движению этой части цепи At, получаем: д р = т Да да ФГ з З0. Так как работа силы T равна TDA, а работа силы тяжести вычисляется как и раньше, то zf обозначает ординату точки M.
Разделите на dt, чтобы выполнить дифференциал. после уменьшения da, это выглядит так: Р = З + х р + п ф я + .З ф 0 х. Если вы замените его значением и выполните преобразование 7 = 2Zf а + Х З + х р А + З З х Т А З Л. Если вы примените эту формулу в случае спирали, вы сразу заметите, что T равно нулю everywhere. So каждая точка в цепи движется так, как будто она изолирована. Отрицательное значение для T может быть obtained. In в этом случае элемент U подвергается сжатию, а не tension. In для того чтобы реализовать движение во всех случаях, необходимо предположить, что цепь образована небольшими сферическими шариками, нанизанными на гибкую нить и скользящими в трубке того же радиуса.
Затем, если T положительно, нить вытягивается. Если T отрицательно, шары, которые вступают в контакт, прижимаются друг к другу other. In в случае циклоиды, вы можете видеть, что сжатие получается везде. Задача о движении тяжелой цепи вдоль неподвижной кривой послужила основой зеркала для интересного применения теории интегральных уравнений Mu Peg, Nouvelles Annales De Mathematiques, juillet, 1909. 1.Применение к движению фикчированных гаек болтов снаружи friction. In при этой операции все движущиеся твердые точки представляют собой один и тот же шаг H спиральной линии, и когда Болт поворачивается на угол 6, он движется параллельно оси с интервалом k 0.
Поскольку система полностью связана, теорема о кинетической энергии полностью определяет движение. используйте ось Болта для оси Z. На систему, образованную Болтом, влияет реакция указанной силы 4 Fn с гайкой, поскольку трения нет. Эти реакции проходят перпендикулярно поверхности болта. пусть r, 0 и z цилиндрические координаты любой точки в системе, а z0 координата z, когда угол 0 равен нулю. Декартовы координаты этой точки в определенной точке следующие: х = р cos0, г = р грех 6, з = З0 4 0 Поэтому скорость этой точки имеет предсказание дуплексный.
Что я могу написать, если введу угловую скорость в следующем виде ДХ ды ДЗ ч Отсюда мы получаем в 2 раза больше скорости. если умножить на m и сложить такую формулу, состоящую из всех точек системы, то получится полная кинетическая энергия вида. k представляет собой радиус инерции, а M массу. Таким образом, форма уравнения кинетической энергии имеет вид Где символ 2 относится к данной силе. 1 с момента работы Сила реакции равна нулю. замена правой части you dx dy dz Для Формулы мы придаем ей форму Но yX это сумма моментов данной силы Относительно оси OZ.
Это равно проекции W на эту ось момента результирующей пары и получается после принятия заданной силы к началу координат. Для 2, 9T0 является проекцией на ту же ось главной оси этих сил, и уравнение кинетической энергии может быть описано следующим образом: 14 фунтов Ура = MI 1 С дифференциацией мы получаем Л4 АЗ+ = ЛГ + 2 Если внешняя сила F удовлетворяет соотношению Тогда предыдущее уравнение примет вид Движение будет равномерным. В общем случае сила может быть сведена к одной и той же паре с динамо машиной, то есть вектору момента AG, направленному вдоль одной и той же прямой с одинаковой силой AR и AR. In кроме того, R величина силы, p параметр Р Мы.
Показывает кратчайшее расстояние между линиями R и Oz и угол между ними. Затем, когда вы выполняете сокращение до начала координат, вы получаете следующие результаты: = Р ZQS а, 7В = г COS в, А, р б грех Потому что N должно быть суммой моментов для 2 силовых Оз, составляющих силу R и пару G. Движение Болта приводит к поступательному движению вдоль оси Oz и вращению вокруг нее, причем согласно шарику, он имеет амплитуду w, а параметр= Обозначения, формула кинетической энергии 1 пи 2 2 в KjP + Р потому что + зта ДТ. Из уравнений видно, что выражение суммы основной работы заданной силы симметрично относительно динамо машины и винта.
Приложение к проблеме трех тел. Применим общую теорему к следующей задаче: найти движение 3 совершенно свободных материальных точек, которые притягиваются друг к другу по закону Ньютона. 23, 3131 это указанная точка Af1 Af2, 3.Расстояние между ними. Силы взаимодействия между этими точками имеют соответствующие значения ФМ Н3 г Два Двадцать три dt Поскольку никакая внешняя сила не действует на систему, движение ее центра тяжести становится линейным и равномерным, что приводит к 3 конечным уравнениям движения. По той же причине вы можете применить теорему о площади по отношению к 3 координатным плоскостям, дающим первые 3 интеграла.
Наконец, используя теорему о кинетической энергии, мы можем получить еще один Интеграл 1. Фактически, кинетическая энергия системы 4 + m2vl + С другой стороны, сумма основной работы сил взаимодействия, как мы видели до сих пор Есть полный дифференциал функции Следовательно, существует энергетический Интеграл 7 VD + m2v2 + m3vs = + y— 4 7 — J + A Брунс доказал, что полученные таким образом интегралы уникальны Bruns, Acta mathematica, vol. СИЦЗЯН. Они алгебраичны в терминах координат объектов и их первых производных. Пуанкаре То Же, Т. XIII показал, что задача о трех телах не допускает аналитического и четкого интеграла, за исключением приведенного выше.
Смотрите также:
Решение задач по теоретической механике
| Случай, когда теорема кинетической энергии дает первый интеграл | Теоремы кинематики для вычисления моментов количеств движения и кинетической энергии |
| Размерности | Вычисление кинетической энергии |
