
Оглавление:


Устойчивость движения по первому приближению
- Решение задачи определения устойчивости движения прямым методом интегрирования дифференциальных уравнений возмущенного движения. В большинстве случаев вы не можете реализовать его, потому что вы не можете принять решение на закрытом устройстве. В связи с этим разработаны обширные методы определения устойчивости движения в первом приближении. Этот метод подходит для a. It был известен задолго до того, как появилась классическая куча М. Ляпунов общие проблемы устойчивости движения, 1892. Однако первым установленным условием, которое может определить устойчивость в первом приближении, является a. m. it был Ляпунов. Оригинальная система упражнений.
Его движение описывается нелинейными дифференциальными уравнениями. Вот как определить устойчивость движения в первом приближении ПУ 1 Число 0. Число l 0. .. .. .. Число. , 0 О Является частным решением системы дифференциальных уравнений 1-го порядка. Г no. .. No 2 Для заданных начальных условий движения 1 10. Y нет. .. 0 l 3 l 3 Решение 1 определяет возмущение w системы.
Начало осей декартовых координат взято в пепо-движном центре О, к которому притягивается точка Л1. Людмила Фирмаль
При других начальных условиях движения значение переменной d l, определяющей движение системы, может быть выражено следующим образом ка л 0ch-ХЛ. 4 Тогда уравнение 2 принимает вид Г Я. О-Л-, , МО 4-Х,. О4-Х, 1. 5 Если вычесть Формулу 2 из каждой соответствующей формулы 1 1 04-х. ., 0-бх, -ги, 0 .. .. .. ДО. 6 Для краткости мы покажем правую часть этих уравнений. Ля. ,. Хl.
Получена система дифференциальных уравнений возмущающего движения А хр, ХЛ, .3- Из 7 Л 0 .О .. .O, 0 0 9 И так оно и есть .х1×2 .. Xa 0 10 Это специфическое решение для системы 8, соответствующее различным движениям. Для учета устойчивости в первом приближении в системе уравнений справа выделяются линейные члены 8. При эюм, время НС показывает Правая часть уравнения Ч- л, х. .хл, 11 где v0 а х Лл ссрж слабый, AEL, не Если моложе и выше переменной xk .Затем, чтобы исследовать устойчивость, постройте систему, полученную из II, отбросив нелинейный член уравнение вариации в качестве первого приближения .. Х, — р 2 в.
Затем находим характеристическое уравнение системы 12 У1 С У -Я-ar1 −2 ЛН 0. 13 Согласно сильной теореме Ляпунова, непертурбативное движение, определенное в уравнении i, устойчиво, когда все корни характеристического уравнения 13 отрицательны. Материал part. In в этом случае отброшенный нелинейный член и правая часть уравнения ii не влияют на устойчивость движения. Согласно 2-й теореме Япупова, если существует хотя бы 1 корень характеристического уравнения 13, то движение песни и падение, определяемое уравнением 1, неустойчиво. Корень с положительной пробной частью. И в этом случае отбросить нелинейный член ii в правой части уравнения нельзя Это влияет на стабильность движения.
Поэтому данное исследование, как начальное приближение, может окончательно ответить на вопрос об устойчивости движения в случае наличия корней характеристического уравнения Отрицательные или положительные материальные части. Если в корне характеристического уравнения есть объект, в котором действительная часть равна пуле, а пуля-мнимой, то мы судим об устойчивости движения Первое приближение невозможно. А. m. as Ляпунов показал.
В этих случаях, которые называются критическими, необходимо рассматривать члены первого следующего порядка дифференциального уравнения .Знак корня характеристического уравнения может быть определен на основе теоремы фульвиса, которая формулируется следующим образом уравнение I-го порядка с вещественными коэффициентами о 0 14 Есть все маршруты с отрицательным реальным временем 1, и если все Определитель типа 1 1 1 О О о, , .П3 3 а-1 а — а 1 1 2 1 Один 1 0 0 .. 0 Я А1 Д вверх. .0 a1p — 11p −1 1 .. L 1 positive. In сложение, 0, это r для головни Это достаточно необходимо.
В случае n s и pi задач n, изучение основ h g- Восток и Запад, мы поем в первом приближении dywedodd llefarydd АР побежал llywodraeth Камри ЕС БПК БПК веди уя ymwneud мистер ysgrifennydd Камри. I определите число c для использования степеней свободы системы и выберите Общие координаты. 2 Создайте дифференциальные уравнения возмущенного движения, используя уравнение Лагранжа. 3 выражает дифференциальное уравнение возмущенного движения, предполагая, что координаты возмущенного движения и обобщение обобщенной скорости различны по значениям пр Может быть перемещен в значение первого порядка малого 4 полученный l Ф Х.
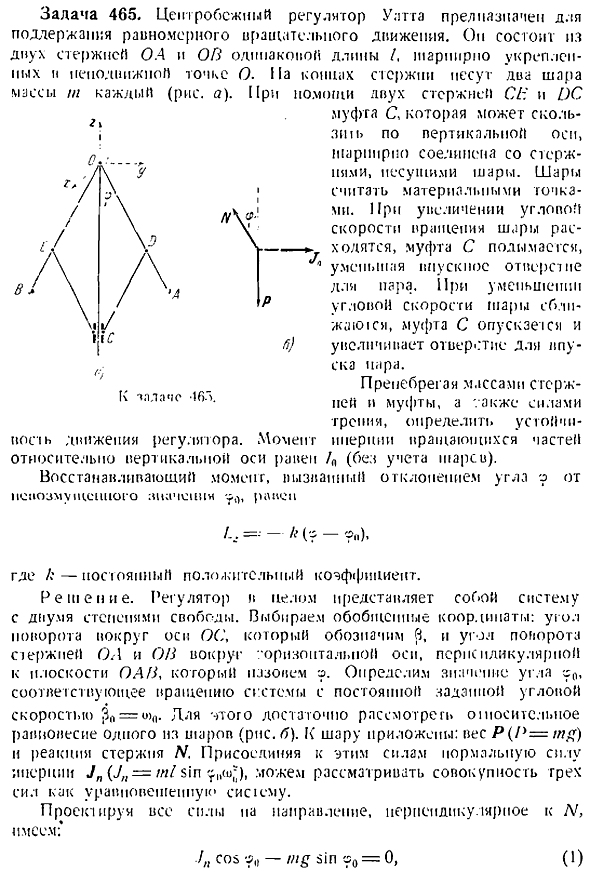
- В уравнении рениал отбросить меньшие сроки от 2 или больше. О из уравнения возмущенного движения тела. Вычертите соответствующее дифференциальное уравнение возмущенного движения. 6 создать характеристическое уравнение для системы вариационных дифференциальных уравнений с постоянными коэффициентами линейного dn x. 7 используя теорему харвица, определите действительный знак части корня движения характеристического уравнения и судите об устойчивости движения исходной системы. 465 будет дано. Регулятор Ватта центробежный конструирован для поддержания равномерного вращательного движения. Это 2 стержня 0. 4 и o Он составлен oflength конкатенирован с равным Неподвижная точка О.
Стержень имеет 2 шарика, которые могут скользить вертикально, шарнирно соединенные со стержнем, несущим шарик с помощью 2 стержней c t и муфты m os. Шарик рассматриваемый как материал dot. As скорость угла поворота увеличивается, шарик будет расходиться, а муфта c поднимется и вход пара уменьшится. Когда угловая скорость уменьшается, шары приближаются друг к другу, и c Опустите или расширьте вход пара. Игнорирование массы стержня и муфты, а также силы лозы, определяет стабильно высокий удельный вес вращающейся части Н кроме шарика. Ход регулятора.
Так, сила давления пороховых газов на пулю или снаряд проявляется в сообщении им начальной скорости. Людмила Фирмаль
Момент для вертикальной оси раны Ненормальное значение угла o-восстанавливающие моменты, вызванные смещением от yl поврежденного что такое обходной путь П. Где a-положительный коэффициент константы. Ресепия. Весь регулятор представляет собой систему с 2 степенями свободы. Выберите обобщенные координаты угол поворота вокруг оси представлен p и угол поворота Стержень ОА и 00 вращаются вокруг горизонтальной оси, перпендикулярной плоскости ОАО. Это называется e.
Используйте константы для определения угла, который соответствует вращению системы Угловая скорость p0 o n. To для этого достаточно рассмотреть около 1 носа и 1 тела равновесия шара рис. 6. Крепление на шаре противодействие веса p p t и стержня n Их можно считать совокупностью обычных сил инерции ou sin Власть как сбалансированная система. Проецируя все силы в направлении перпендикулярном нам.
Таким образом, заданная угловая скорость вращения системы соответствует четко определенному углу p0. Это устойчивое движение системы паза pae 1sya с поющим движением. Для создания дифференциальных уравнений движения системы используйте уравнение Лагранжа. Кинетическая энергия системы Гамма, 1 — 4Л 3 Момент инерции по отношению к естественному po, r рис. А есть сумма момента инерции 0 всех вращающихся частей, кроме шара величина инерции мужской монеты гея не изменяется при угле углаp. Рассчитайте момент инерции шара, зависящий от y. la, оТ2т 2 1пч.
Таким образом, кинетическая энергия системы выражается в обобщенных координатах вида 7 — 2Ш ЗТ 3 4-2da 4. 6 Переходим к определению обобщенных сил. Первая обобщенная сила b Кох как Нахо ннся если н шциеп г соответствует Теперь выкинем возможные движения с выражением элементарных задач 7 В результате обобщенная сила равна 8 2-я обобщенная сила определяется как частичная производная потенциала относительно угла. In факт, когда угол изменяется, только сила тяжести шара делает эту работу. Тяжесть оставшейся вращающейся части системы не изменяется, а работа крутящего момента 2 2 при изменении угла поворота не изменяется Равный нулю.
Тогда любая постоянная 11 Энергия шара 17 −2 ФД Соз 9 Далее построим уравнение lzgrange. , Р3. 10 1 г-2а в 2 один — П Учитывайте небольшие колебания в системе вблизи положения движения, такие как пение 2. О 5 Вайоминг — — оз. 12 Если вы введете значение переменной в выражение 10, то увидите следующее 2М 2 1П потому что Ф 1 — к г — 0 13 Или дано 12 2 л 281p — г о Соевые бобы Н р о 8. — унция −1 0 2 Г2 1П ф0-2-3 33 — g 3. 14 Чтобы построить уравнение малого движения, мы всесторонне вычисляем все члены до значения первого малого порядка.
Найти после простого преобразования. Развитие 0 −2 tГ1нп2 В 1 ртГ-81п2 0, 3о3ф-к 3 0 15 Из 11 находим дифференциальное уравнение 2-го порядка малого движения. −3 л 2-2 Япончик — 2Т 1Н 16 Введя в это уравнение значения 12 и 5, получим 8 — К — Б 3 51 П 2 — СН-2М — — −8 — 7 Откройте скобки и вычислите все условия малого движения с точностью до небольшого количества 1-го заказа. После простого преобразования, заданного уравнением 2, получим О 1П 20 о со −6 СО82 Что 0. 18 Таким образом, мы получаем систему из 2 дифференциальных уравнений 15, 18 малых перемещений системы.
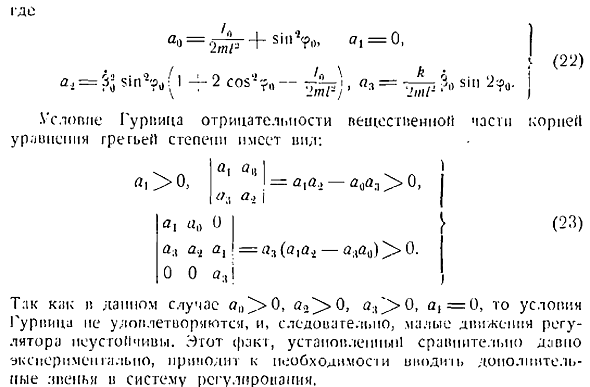
Чтобы получить характеристические уравнения этой линейной системы уравнений с постоянными коэффициентами, найдите решение вида c 3 С, 19 Где c, mf, p-постоянные величины. Подставляя эти значения в формулы 15, 18 и уменьшая общий коэффициент c1 1, получаем характеристическое уравнение 9. О Проще говоря, это уравнение является 21 Куда 22 Условие фульвиза отрицательности вещественной части корня уравнения 3-го порядка принимает вид 0 Я 0, 0. , — Х3 0 а, ц0 0 я А2, А1 А3 0. 0 0 a 1 23 В этом случае условие Гурвица не выполняется, поскольку оно равно a0 0, b 0, al 0, q1 0, поэтому малое движение регулятора будет неустойчивым.
Смотрите также:
Предмет теоретическая механика
