
Оглавление:


Ускорения точек тела при плоском движении
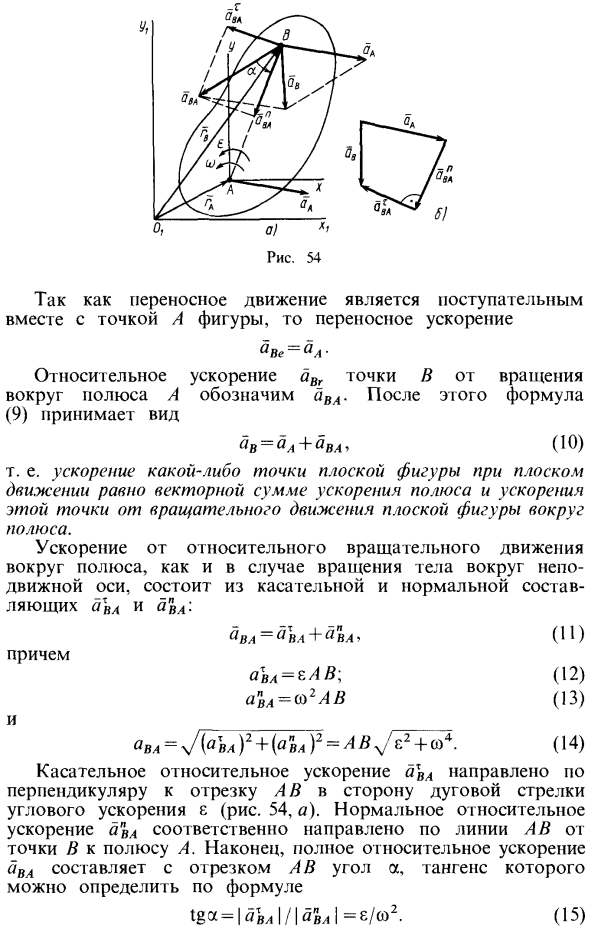
- Рассмотрим плоское движение плана этажа как сложное. Это состоит из поступательного перевода, состоящего из относительных вращений вокруг полюсов A и A согласно теореме ускорения точки B. Рисунок 54. Переносимое ускорение переводится с точки А на рисунке, поэтому переносное ускорение. Относительное ускорение aBr точки B от вращения вокруг полюса A обозначается abA. После этого уравнение (9) принимает вид: av = aA + avl, (10).
То есть ускорение точки на виде сверху во время плоского движения равно векторной сумме ускорения на полюсе и ускорения в этой точке от вращательного движения вида сверху вокруг полюса. Как и в случае вращения тела вокруг неподвижной оси, ускорение от относительного вращательного движения вокруг полюса состоит из тангенциальной и нормальной составляющих ABA и ABA. ^ vl- ^ vl + dVA, (11) далее abA = eAB; (12) аВА = о> 2АВ (13) и + («SJ» = V’2 + «‘■ <14’ Относительное тангенциальное ускорение aVA направлено перпендикулярно сегменту AB в направлении круговой стрелки с угловым ускорением £ (рис. 54, а).
При переходе от Малой системы материальных объектов к более крупной системе, например, от спутника Земли к самой Земле, Солнцу, Галактике, сопротивление окружающей среды уменьшается. Людмила Фирмаль
Нормальное относительное ускорение a «VA направлено вдоль линии AB от точки B к полюсу A. Наконец, полное относительное ускорение aVA составляет угол a с отрезком AB. tga = я «ow 1/1» ow 1 = e / w2- (15) Из уравнения (15) видно, что угол a одинаков во всех точках на виде сверху. Если φ> 0, угол a от ускорения aVA до сегмента B A должен быть установлен против часовой стрелки. Когда φ <0, необходимо задержать по часовой стрелке. То есть во всех случаях угол a всегда должен быть задержан в направлении круговой стрелки углового ускорения независимо от направления вращения фигуры. Согласно (10) и (11), вы можете построить ускоренный многоугольник для точки B в выбранном масштабе (рисунок 54.6).
Уравнение (10), которое определяет зависимость ускорения двух точек на плане этажа, может быть получено путем прямого дифференцирования уравнения вектора скорости. Это всегда верно. Существует vB = + th x AH. Различают обе стороны этого уравнения во времени, принимая во внимание изменение величины вектора относительно фиксированной системы координат (полностью дифференцированной). получить д «, дз дз дз дз » Где di> B / dz = aB, dvA / dt ~ aA — ускорение точек B и A относительно фиксированной системы координат. d (b / dz = — плоское угловое ускорение. Поскольку модуль вектора AJ постоянен, производная по времени выражается в виде ^ (ЛВ) = хAB. Объединение полученных результатов дает aV = aL + eX LV + yx (yx AY).
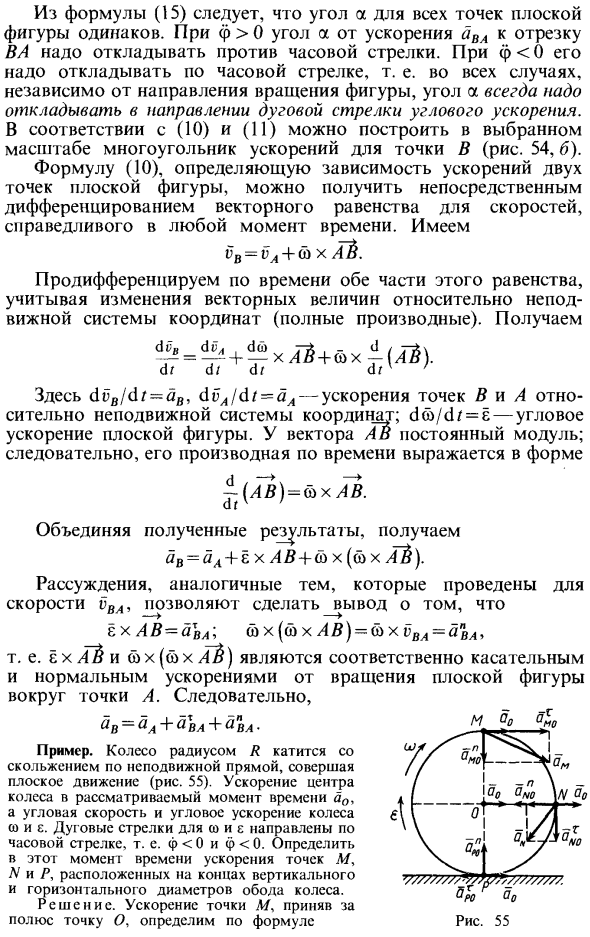
Можно сделать вывод, что ex AB = aBA с аргументами, аналогичными аргументам, выполняемым для скорости vBA. yx (wx AB) = & xiVL = aVL, то есть yy AI и yy (yy AI) — тангенциальное ускорение и вертикальное ускорение от вращения плоской фигуры вокруг точки A соответственно. Таким образом, ai = a0 + a «Mo + a’mo I аналогичная формула для точек N и P. Тангенциальная скорость и стандартная скорость точки M, обусловленные вращением колеса вокруг точки O, составляют a’mo = eOM = £ £; a «oo = / (ao-H 0 = / dt, , = Re, Ячейка О движется линейно, B = | dco / dr |;. aj> = | diio / dr |. Учитывая, что У нас есть , = EOP = tR = ac Так что, если колесо вращается по прямой без скольжения д, = д? o # 0, То есть ускорение в центре скорости в момент, когда скорость равна нулю. Если угловое ускорение не указано, его можно определить по формуле, если нет проскальзывания колеса по прямой я = a0IR.
- О есть ускорение точки на виде сверху во время плоского движения равно векторной сумме ускорения на полюсе и ускорения в этой точке от вращательного движения вида сверху вокруг полюса. Как и в случае вращения тела вокруг неподвижной оси, ускорение от относительного вращательного движения вокруг полюса состоит из тангенциальной и нормальной составляющих ABA и ABA. ^ vl- ^ vl + dVA, (11) далее abA = eAB; (12) аВА = о> 2АВ (13) и + («SJ» = V’2 + «‘■ <14’ Относительное тангенциальное ускорение aVA направлено перпендикулярно сегменту AB в направлении круговой стрелки с угловым ускорением £ (рис. 54, а).
Нормальное относительное ускорение a «VA направлено вдоль линии AB от точки B к полюсу A. Наконец, полное относительное ускорение aVA составляет угол a с отрезком AB. tga = я «ow 1/1» ow 1 = e / w2- (15) Из уравнения (15) видно, что угол a одинаков во всех точках на виде сверху. Если φ> 0, угол a от ускорения aVA до сегмента B A должен быть установлен против часовой стрелки. Когда φ <0, необходимо задержать по часовой стрелке. То есть во всех случаях угол a всегда должен быть задержан в направлении круговой стрелки углового ускорения независимо от направления вращения фигуры. Согласно (10) и (11), вы можете построить ускоренный многоугольник для точки B в выбранном масштабе (рисунок 54.6).
Чтобы начать с самой простой задачи, нам сначала нужно рассмотреть движение частиц очень малой материи, чтобы их положение можно было определить как положение геометрических точек, без существенных ошибок. Людмила Фирмаль
Уравнение (10), которое определяет зависимость ускорения двух точек на плане этажа, может быть получено путем прямого дифференцирования уравнения вектора скорости. Это всегда верно. Существует vB = + th x AH. Различают обе стороны этого уравнения во времени, принимая во внимание изменение величины вектора относительно фиксированной системы координат (полностью дифференцированной). получить д «, дз дз дз дз » Где di> B / dz = aB, dvA / dt ~ aA — ускорение точек B и A относительно фиксированной системы координат. d (b / dz = — плоское угловое ускорение. Поскольку модуль вектора AJ постоянен, производная по времени выражается в виде ^ (ЛВ) = хAB. Объединение полученных результатов дает aV = aL + eX LV + yx (yx AY).
Можно сделать вывод, что ex AB = aBA с аргументами, аналогичными аргументам, выполняемым для скорости vBA. yx (wx AB) = & xiVL = aVL, то есть yy AI и yy (yy AI) — тангенциальное ускорение и вертикальное ускорение от вращения плоской фигуры вокруг точки A соответственно. Таким образом, ai = a0 + a «Mo + a’mo I аналогичная формула для точек N и P. Тангенциальная скорость и стандартная скорость точки M, обусловленные вращением колеса вокруг точки O, составляют a’mo = eOM = £ £; a «oo = / (ao-H 0 = / dt, , = Re, Ячейка О движется линейно, B = | dco / dr |;. aj> = | diio / dr |. Учитывая, что У нас есть , = EOP = tR = ac.
Так что, если колесо вращается по прямой без скольжения д, = д? o # 0, То есть ускорение в центре скорости в момент, когда скорость равна нулю. Если угловое ускорение не указано, его можно определить по формуле, если нет проскальзывания колеса по прямой я = a0IR.
Смотрите также:
Задачи по теоретической механике
| Мгновенный центр скоростей | Мгновенный центр ускорений |
| Вычисление угловой скорости при плоском движении | Основные способы вычисления углового ускорения при плоском движении |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
