
Оглавление:



Ускорение в относительном движении. Теорема Кориолиса
- Выше С. 45 показана очень важная теорема, устанавливающая связь между абсолютной скоростью движущейся точки и ее относительной скоростью относительно системы 5, которая совершает известные движения. Поставьте задачу доказать однотипную теорему и соединить абсолютные и относительные ускорения. Используйте аналитический метод, который дает ранее геометрически доказанную теорему о скорости.
Для определения движения системы отсчета 5, изучающей относительное движение, введем 3 движущиеся оси Охуг, которые тесно связаны с 5, и установим их движение таким же образом. Пусть M будет движущейся точкой, как это было сделано в пункте 51.Поскольку он движется как в системе 5, так и в пространстве, относительные координаты x, y, r и абсолютные координаты x и Y относительно оси движения становятся функциями времени.
Когда говорят, что тело находится в покое или в движении, то под этим всегда понимают,что этот покой или движение имеет место относительно некоторых других тел. Людмила Фирмаль
Эти координаты связаны с формулой ХХ о + ах + .a1o 4 ОГ Р Т = п0 б + 1л + ПР2 1 Г1 2О + ТХ + 71L4 Т22 Точка M имеет абсолютную скорость и абсолютное ускорение, а проекции на неподвижную ось равны Ох ой А1 1 Икс 6 2У 2 2 0yo 4 Его относительный прогноз Скорость и ускорение находятся на оси движения Ах, А2 университета. 01 А1а а х а АЭ 9 ае ае УГ Л неподвижной оси на проекцию год КП Yy Относительная влажность. Бру. РГ + 2 л РЗ, СР. РГ 1 АР + АР Т1 + 2 АР Yy Точка M также имеет переносную скорость и ускорение, поэтому проекция на неподвижную ось равна В Л Эти выражения получаются, если рассматривать x, y и r как константы.
- Это связано с тем, что при постоянной связи этой точки с осью движения скорость и ускорение называются переносными скоростью и ускорением точки М. Дифференцируя Формулу 1 относительно дает аналитическое выражение 45 пункт ранее доказанной теоремы. Абсолютная скорость равна геометрической сумме относительной скорости и скорости транспортировки. После 2 й производной выражения 1 получаем следующее: Количество y1 и 2 аналогичные уравнения 2 й производной от gx.
To уточним смысл этих уравнений, посчитав, что вектор начинается в точке Л1 и имеет проекцию на следующую неподвижную ось. И Этот вектор называется инкрементным ускорением. Уравнение 2 показывает, что проекция вектора на каждую фиксированную ось равна сумме проекций U и или на одну и ту же ось. То есть, вектор.1a геометрическая сумма векторов и. Таким образом, абсолютное ускорение является результатом относительного ускорения, переносного ускорения и инкрементного ускорения. Для этого находим проекцию на движущуюся ось вектора. Очевидно.
Эти перемещения были изучены, главным образом, Томсоном и Тэтой, Шёнеманом, Мангеймом, Рибокуром, Кёнигсом. Людмила Фирмаль
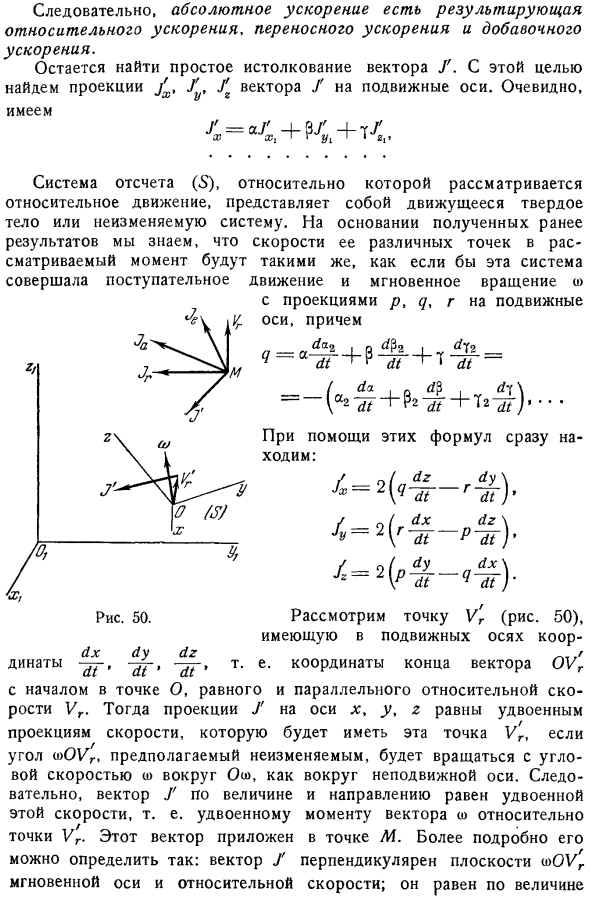
У нас есть Система отсчета 5, в которой учитывается относительное движение, является движущейся жесткой или неизменной системой. Исходя из полученных ранее результатов, известно, что скорость различных точек рассматриваемого момента будет такой же, как если бы эта система выполняла поступательные и мгновенные вращения Проекции р, д, г на подвижные оси Рисунок 50. С помощью этих формул, вы можете сразу увидеть: Рассмотрим точку y g рис. 50 на движущейся оси О, о, о, о. dinates, ш, то есть, координаты конца вектора КВГ Проекция на оси x, y, r, начиная с точки O, параллельной относительной скорости, то, предполагая, что угол О не изменяется, равна проекции 2 кратной скорости этой точки Yr.
В результате вектор величины и направления равен 2 кратному значению этой скорости, то есть 2 кратному моменту вектора относительно точки Vx. Этот вектор применяется к точке A4.Вы можете определить следующее Более подробно: вектор перпендикуляр к плоскости и op amp, мгновенная ось, относительная velocity. It равен произведению 2 раз ом на расстояние от точки Yy до оси Oo, то есть 2 oYy 81P w, Yy .Наконец, мгновенное вращение направлено относительно плоскости wOy в направлении, в котором конец V вектора OA вращается параллельно относительной скорости. И так оно и есть. о = в, + УУ, 4 = А + а + Вектор исчезает, когда w, yk или 81n w, yy , которые являются 3 факторами, исчезают.
Смотрите также:
Предмет теоретическая механика
