
Оглавление:

Уравнения движения плоской фигуры. Уравнения движения точки плоской фигуры
Возьмем в плоскости движения фигуры  систему координат
систему координат  , неподвижную по отношению к этой плоскости. Выберем на фигуре какую-либо точку
, неподвижную по отношению к этой плоскости. Выберем на фигуре какую-либо точку  и примем ее за начало другой системы координат
и примем ее за начало другой системы координат  , неизменно связанной с движущейся фигурой (рис. 143).
, неизменно связанной с движущейся фигурой (рис. 143).
Положение подвижной системы координат , а следовательно, и самой фигуры в ее плоскости, определяется положением точки и углом  поворота фигуры (т. е. углом между положительными направлениями осей
поворота фигуры (т. е. углом между положительными направлениями осей  и
и  ).
).
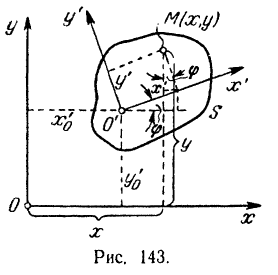
Произвольная точка , неразрывно связанная с движущейся фигурой и выбираемая для определения положения фигуры, называется полюсом.
При движении фигуры в ее плоскости координаты полюса (в нашем случае точки ) и угол изменяются с течением времени и являются однозначными и непрерывными функциями времени:

Если эти функции известны, то для каждого момента времени можно найти соответствующие ему значения  и и следовательно, определить положение движущейся фигуры в ее плоскости.
и и следовательно, определить положение движущейся фигуры в ее плоскости.
Таким образом, уравнения (98) являются уравнениями движения плоской фигуры или, что то же, уравнениями плоского движения тела.
Если движение фигуры  задано уравнениями (98), то нетрудно найти и уравнения движения любой ее точки
задано уравнениями (98), то нетрудно найти и уравнения движения любой ее точки  .
.
Как известно из аналитической геометрии (формулы преобразования координат при повороте координатных осей и переносе их начала), координаты  и
и  точки относительно «неподвижной» системы координат
точки относительно «неподвижной» системы координат  будут выражаться следующими зависимостями:
будут выражаться следующими зависимостями:
где — координаты полюса (произвольной точки фигуры),  — координаты точки относительно подвижной системы координат неизменно связанной с данной фигурой; — угол поворота фигуры.
— координаты точки относительно подвижной системы координат неизменно связанной с данной фигурой; — угол поворота фигуры.
Уравнения (99) являются уравнениями движения произвольной точки фигуры в ее плоскости.
Эти уравнения позволяют аналитически определить траекторию, скорость и ускорение любой точки плоской фигуры.
Пример задачи:
Линейка  эллипсографа (рис. 144) приводится в движение кривошипом
эллипсографа (рис. 144) приводится в движение кривошипом  , вращающимся с постоянной угловой скоростью
, вращающимся с постоянной угловой скоростью  . Составить уравнения движения линейки и ее точки . Найти также траекторию этой точки.
. Составить уравнения движения линейки и ее точки . Найти также траекторию этой точки.
Дано:

Решение:
Возьмем за начало неподвижной системы координат центр  вращения кривошипа. Ось направим горизонтально вправо, ось — вертикально вверх.
вращения кривошипа. Ось направим горизонтально вправо, ось — вертикально вверх.
За начало подвижной системы координат примем точку  . Ось
. Ось  направим вдоль линейки вправо, ось
направим вдоль линейки вправо, ось  — вверх.
— вверх.
Как видно из рис. 144, координатами полюса будут:
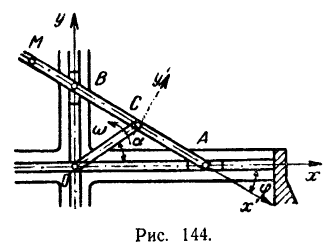
Угол поворота равномерно вращающегося кривошипа  Из рис. 144 нетрудно видеть, что направление поворота линейки эллипсографа относительно полюса противоположно направлению вращения кривошипа, следовательно, соответствующий углу а поворота кривошипа угол поворота линейки эллипсографа
Из рис. 144 нетрудно видеть, что направление поворота линейки эллипсографа относительно полюса противоположно направлению вращения кривошипа, следовательно, соответствующий углу а поворота кривошипа угол поворота линейки эллипсографа

Таким образом, уравнениями движения линейки будут:

Координаты точки этой линейки в подвижной системе (рис. 144):

По формулам (99) находим теперь уравнения движения этой точки в плоскости :

Полученные уравнения движения точки служат одновременно и уравнениями ее траектории в параметрической форме. Для того чтобы получить уравнение траектории в обычной форме, исключим из них параметр  :
:
Следовательно, траекторией любой точки линейки будет эллипс с полуосями

и центром в точке .
По найденным уравнениям (1) движения точки в прямоугольных координатах нетрудно найти как проекции
ее скорости, так и проекции
ее ускорения на координатные оси, а затем модули и направления скорости  и ускорения
и ускорения  точки для любого момента времени.
точки для любого момента времени.
Эта теория взята с полного курса лекций на странице решения задач с подробными примерами по предмету теоретическая механика:
Теоретическая механика — задачи с решением и примерами
Возможно вам будут полезны эти дополнительные темы:
