
Оглавление:


Учёт массы упругой системы при колебаниях.
- Учитывайте массу упругой системы при вибрации. А. Если колебательная система, несущая нагрузку Q, имеет достаточно большую распределительную массу (число степеней свободы велико), то упрощенные расчеты, приведенные в предыдущем пункте, в этом случае дифференциальные уравнения движения составляются с учетом массы системы. Для решения такой задачи удобнее исходить из закона сохранения энергии, а не из условий равновесия, в которых составлены уравнения (35.23) и (35.24). Предполагая количество
энергии, передаваемой системе при выходе из равновесия и сумму кинетической энергии и потенциальной энергии нагрузки и упругой системы (35.29), эта формула показывает, что в случае вибрации происходит непрерывный процесс преобразования энергии из одного вида в другой, без потери энергии. когда система достигает одного из крайних положений, где скорость колебательного движения равна нулю, а следовательно, кинетическая энергия (t=0) равна
нулю, потенциальная энергия нагрузки Это неудивительно, ведь закон Людмила Фирмаль
сохранения энергии не учитывает обмена энергией, который происходит в системах нескольких степеней свободы. Таким образом, решение вибрационной задачи системы с большим числом степеней свободы сводится к простейшей задаче, которая обсуждается в 222 и состоит примерно из одной (первой) частоты свободных колебаний. Рассмотрим теперь некоторые примеры использования уравнения (35.29). B. As в первом примере исследуют вибрацию груза Q, подвешенного на нижнем конце призматического стержня длины/,
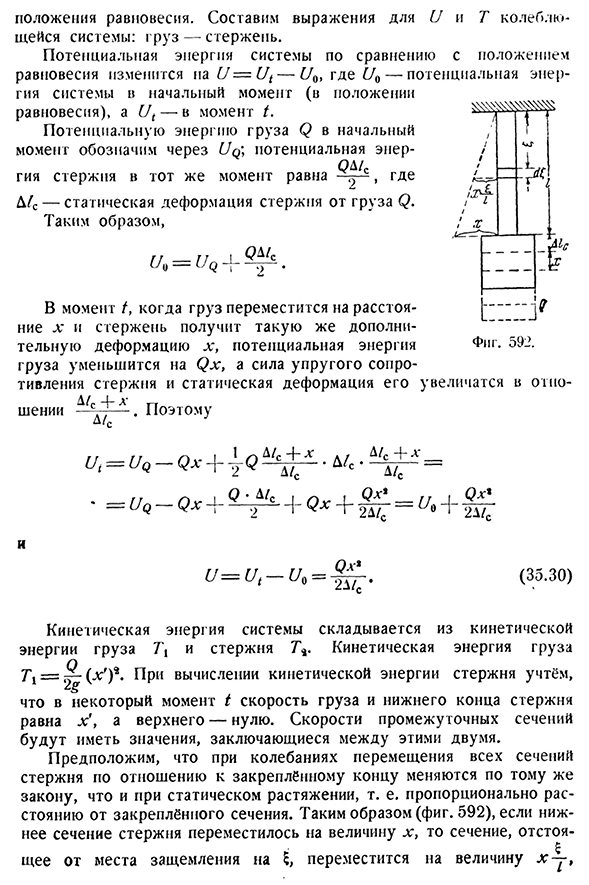
площади поперечного сечения F и удельного веса. (Инжир. 592). Затем выведите его из равновесия и, оставив на себе, груз начнет совершать продольные колебания около§ 223]в вибрации g93 занимает масса упругой системы Положение равновесия. Составим формулу для U и T колебательной системы: нагрузка-стержень. Потенциальная энергия системы сравнивается с положением равновесия, где U-Ut-U* — потенциальная энергия системы в первый момент (положение
- равновесия), а Ut-T. Потенциальная энергия нагрузки Q в первый момент такова, что потенциальная энергия стержня в этот же момент равна QA/C, А D / C-потенциальная энергия нагрузки Q. И так оно и есть., Когда нагрузка перемещается на расстояние x и стержень подвергается той же дополнительной деформации x, потенциальная энергия нагрузки уменьшается на Qx, тем самым уменьшая упругое сопротивление стержня и статическое сопротивление. И (35.30) Кинетическая энергия системы складывается из кинетической энергии нагрузки 7\и стержня 7. Кинетическая энергия нагрузки T1 —
— — (x g)^. При расчете кинетической энергии стержня учитывают, что в определенной точке скорость нагрузки и нижний конец стержня равны Y, а верхний равен нулю. Скорость средней секции имеет значение между ними. При колебаниях будем считать, что смещение всех участков стержня относительно неподвижного конца изменяется по тем же законам, что и статическое натяжение. Поэтому(рис. 592), когда нижняя секция стержня перемещается на величину x, сечение осадка -£ От места защемления на Е переходим к значению x y, 694, с учетом силы инерции и
вибрации[гл. XXXV Скорость этого участка равна y. действующая сила длины L Людмила Фирмаль
стержневого элемента на расстоянии от неподвижного конца равна: д л. \ Кинетическая энергия всего стержня равна сумме величин D\, т. е. *g_-X’ * Tfl2_-J2g P-2g3 * 0 Таким образом, живая сила стержня равна трети массы, то есть масса движется с той же скоростью, что и груз. q полная энергия системы штанги нагрузки 7’=L+7’2=^ +^)。 Подставляя T и уравнение U (35.30) в уравнение (35.29), находим последнее, преобразуя его с помощью t: Груз, стержень и рабочая сила одного и того же Движение-киньети- Дифференциальный- икс — Или • ^ + —7——— = = D / <2 0+^D / PR где d / PR-статическая деформация от нагрузки дифференциальное уравнение движения, полученное
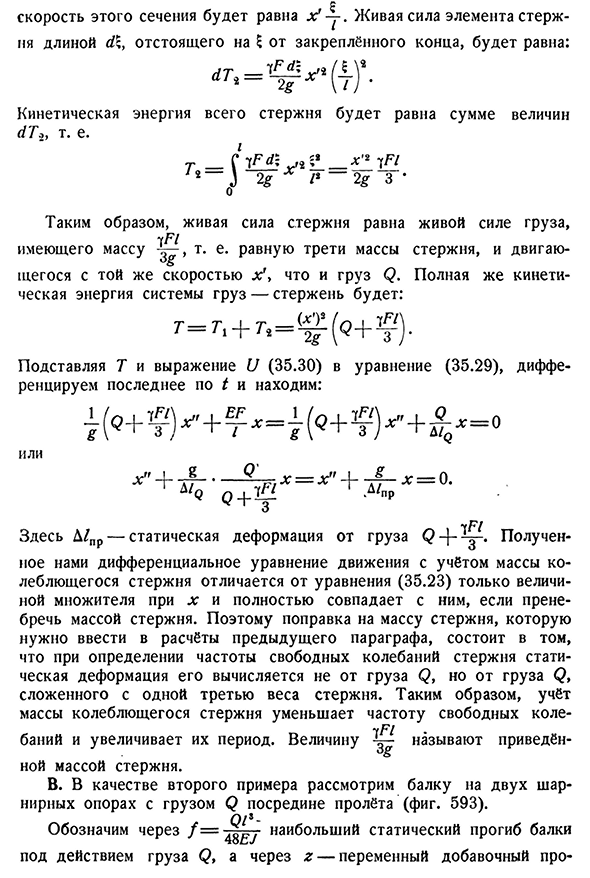
с учетом массы колеблющегося стержня, вводится только по значению множителя уравнения x (35.23), поэтому при расчете предыдущего пункта коррекции веса стержня для определения частоты с учетом частоты свободных колебаний уменьшается, а их цикл увеличивается. Величиной Z p называется заданная масса стержня. Б. В качестве второго примера рассмотрим балку на двух шарнирных опорах, имеющих нагрузку Q в середине пролета(рис. 593). О / 8- Покажем через максимальное статическое отклонение балки под действием нагрузки Q, а в Z-переменной дополнительной про —
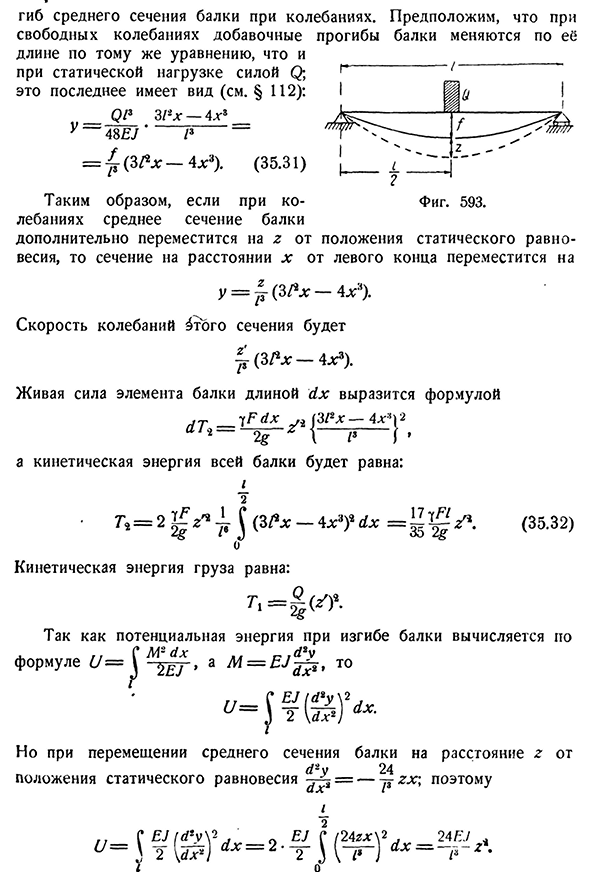
§ 223] вибрации 695 приходится масса упругой системы. Изгиб средней части балки при вибрации. При свободных колебаниях предполагается, что дополнительное отклонение балки изменяется по ее длине по той же формуле, что и при статической нагрузке силой Q.): т. _QP3Z2x-4×3_Y~48EJ ’ Ф~ =■£(3г-4×3). Так, при колебании, если средняя площадь поперечного сечения балки смещается дальше от статического равноудаленного положения до z, то поперечное сечение расстояния x от левого конца равно У=4×3). Скорость вибрации в секции Hugo равна (Заг-4×3). Действующая сила балочного
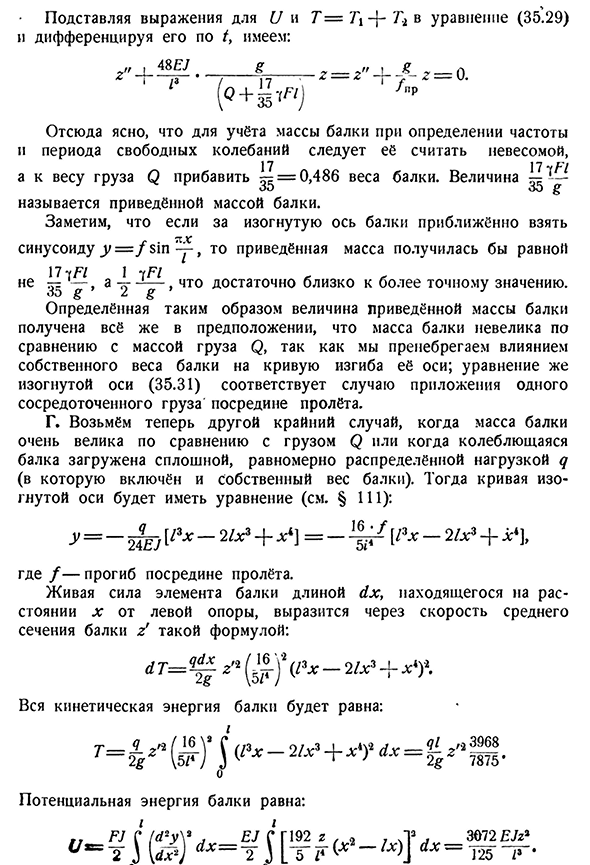
элемента длины D x выражается следующей формулой И кинетическая энергия всего луча: Два. ■Г,=2±J в(3/*х-4×3) 8д х=г&(35.32) Отчет Кинетическая энергия нагрузки равна: Позже, когда вы наклонитесь к потенциальной энергии, вычислите луч. , CM’ — d x c, D3V выражение U-I A M=E J^, то Но при перемещении центральной части луча на расстояние g » rf2y24 положение статического равновесия=poetomu696[CH. XXXV Дифференцируя алгебраическое выражение U и уравнение (35.29) n по: 48E7 Z3 и J PR И Поэтому понятно, что с учетом массы пучка при определении частоты период свободных колебаний следует рассматривать как невесомый, 17 \1 iFl
для загрузки Q вес добавить — =0,486 вес балки. Масса магнитуды-OE oo G пучка. Для криволинейной оси балки возьмем примерно равную массу уменьшения Но Для синусоиды y=f sin y -, 171 01 Не то чтобы Zo g’2g9 был достаточно близок к более точному значению. Величина приведенной массы балки, определенная таким образом, получается в предположении, что масса балки мала по сравнению с массой груза Q. G. Если масса балки очень велика по сравнению с нагрузкой Q, или если колеблющаяся балка нагружена непрерывной и равномерно распределенной нагрузкой q (включается собственный вес балки), то кривая кривой имеет уравнение (см.§ 111): y=-[/W x — 2/x3+**]=-
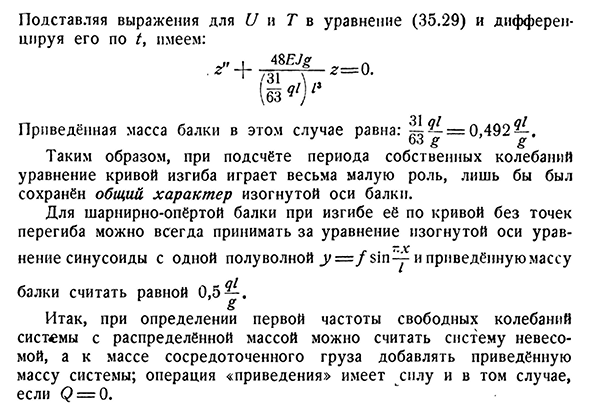
R3* — 2Z^3 4 *4, где f — среднее отклонение балки. Живая сила длины DX балочного элемента, расположенного на расстоянии x от левой опоры, зависит от скорости среднего поперечного сечения балки / уравнения: d T T=q—z’*(t3x-2/X3 4-x’) g. Полная кинетическая энергия пучка равна r=i (4)’ J(P x-2/x>+x’,’d x = g3′. Отчет Потенциальная энергия луча равна: i dx-Wlyzz125P ’ § 224] пример 697 Подставляя выражения U и T в уравнение (35.29) и дифференцируя по/, получаем: z ’/ 31\z и’ Ъ-ОГОНЕК Приведенная масса балки в этом случае равна=0,492^ -, поэтому при расчете периода собственных колебаний уравнение изгиба кривой определяется только общим характером искривления оси балки.
В случае шарнирно-опорной балки при изгибе вдоль кривой без точки изгиба всегда можно принять уравнение оси кривой за уравнение полуволны y=fs\n— — синусоидальной волны, и уравнение оси балки является тем же самым. Поэтому при определении начальной частоты свободных колебаний системы с дисперсной массой рассмотрим систему в невесомости и рассчитаем массу системы в терминах массы сосредоточенной нагрузки.
Смотрите также:
| Влияние резонанса на величину напряжений | Напряжение при ударе. Основные положения |
| Вычисление напряжений при колебаниях | Общий приём вычисления напряжений при ударе |
