
Оглавление:


Требования, предъявляемые к асинхронным исполнительным двигателям
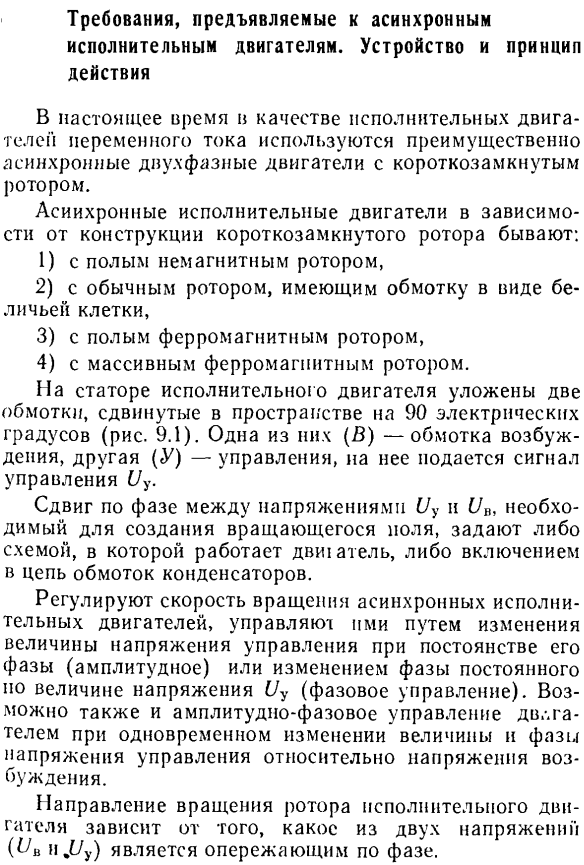
Требования, предъявляемые к асинхронным исполнительным двигателям. Устройство и принцип действия. В настоящее время, асинхронный двухфазный мотор Ротора клетки главным образом использован как мотор привода AC. Согласно конструкции ротора клетки белки, асинхронный мотор исполнения: 1) полый немагнитный Ротор 2) Обычный ротор с клеточной обмоткой 3) полый ферромагнитный корпус Ротора、 4) огромный ферромагнитный Ротор. Статор исполнительного двигателя имеет 2 обмотки, электрически смещающие пространство на 90 градусов (рис.9.1).1 из них (B) обмотка возбуждения, еще 1 (Y) управление, подается управляющий сигнал C1U. Фазовый сдвиг между ТСУ и ( / » ) напряжением, необходимым для создания вращающегося магнитного поля, задается схемой, в которой работает дватель, или включением конденсатора в цепь обмотки.
Амплитудно-фазовое управление двигателем также возможно при изменении величины и фазы управляющего напряжения для напряжения возбуждения. Людмила Фирмаль
- Управление осуществляется регулированием частоты вращения асинхронного привода и изменением величины управляющего напряжения с постоянной фазой(амплитудой) или изменением фазовой постоянной с постоянной напряжения C1U (фазовое управление). Направление вращения ротора рабочего двигателя зависит от того, на какое из 2-х напряжений (n & y) идет фаза. Рассмотрим, как ваш асинхронный привод будет соответствовать основным требованиям, описанным в 3.3. Если вы отсоедините пусковую обмотку обычного однофазного двигателя, он продолжит вращаться. Такие как Рисунок 9.1.Схема коммутации асинхронного исполнительного двигателя. Самоходный тип асинхронных приводов неприемлем из-за того, что они потеряли управление.
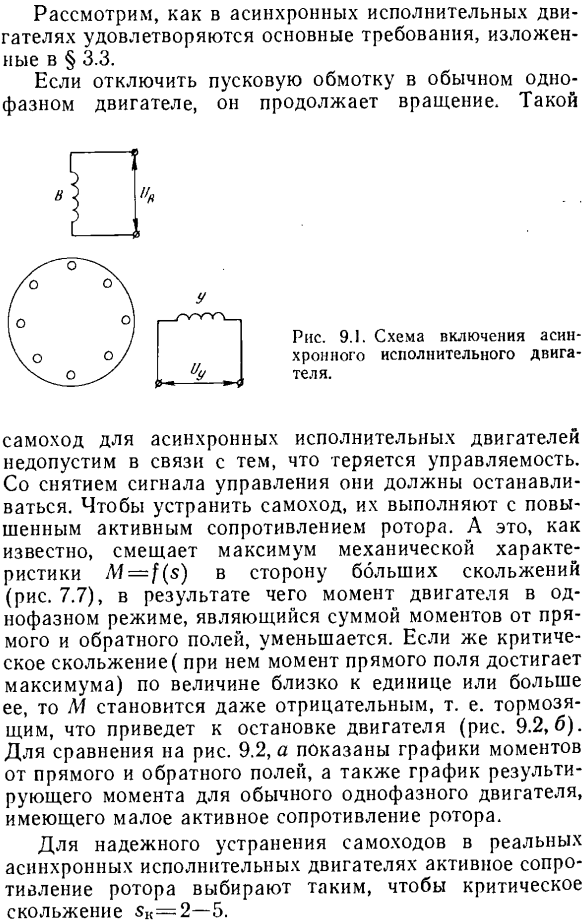
Когда вы снимаете управляющий сигнал, он должен быть stopped. To устраняют самоходность, ротор выполнен с высоким активным сопротивлением. А это, как известно, сдвигает максимум механических свойств на большое скольжение (Рис.7.7), в результате чего крутящий момент двигателя в однофазном режиме (сумма моментов от прямого и обратного полей) уменьшается. Если критическое скольжение (момент прямого магнитного поля достигает максимума) близко к 1 или превышает 1, то M отрицательно. То есть он тормозит, и двигатель останавливается (рис. 9.2.6).Для сравнения на рис. 9.2 показан график моментов от прямого и обратного магнитных полей, а также график результирующих моментов от обычных однофазных двигателей с низким сопротивлением Ротора.
- Для обеспечения исключения самоходной машины с фактическим асинхронным приводом активное сопротивление Ротора подбирается таким образом, чтобы критическое скольжение составляло 2-5 долларов. Помимо самоходки из-за недостаточного критического значения скольжения 5I, существует также так называемая техническая самоходка, при которой включается только обмотка возбуждения и ротор начинает вращаться. Причиной этого явления является возникновение Слабое эллиптическое магнитное поле, обусловленное некачественным изготовлением электродвигателя: наличием короткозамкнутых витков в обмотках статора, неодинаковой магнитной проводимостью в разных радиальных направлениях листов статорного пакета, взаимным замыканием этих листов, etc.
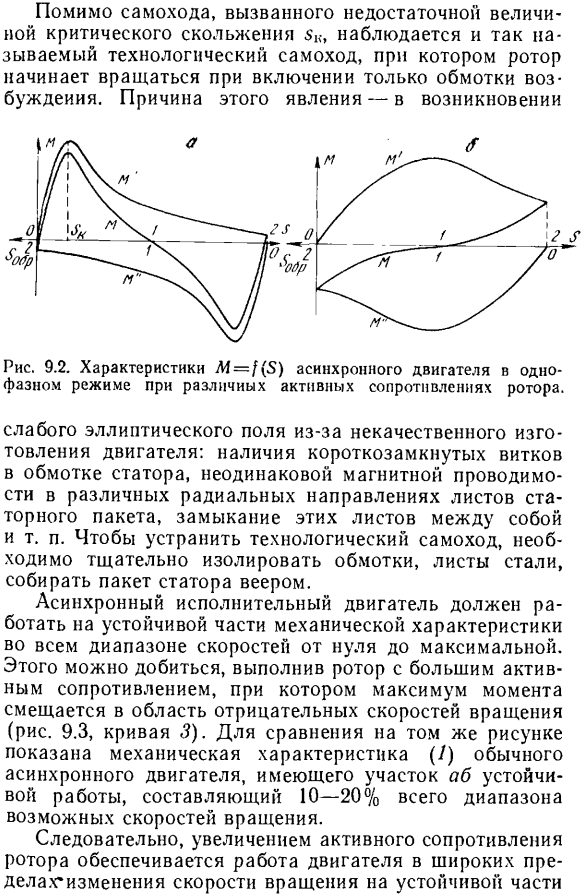
To устраните техническое самовозбуждение, соберите статорные пакеты с обмотками, стальными пластинами и вентиляторами. Это может быть достигнуто путем запуска ротора с большим активным сопротивлением, максимальное значение момента которого смещается в область отрицательной скорости вращения (рис. 9.3, кривая 3).Для сравнения на этом же рисунке показаны механические свойства (/) обычного асинхронного двигателя с участком стабильной работы, включающим 10-20%от общего диапазона возможных скоростей вращения. В результате, повышая сопротивление Ротора, двигатель работает за счет изменения частоты вращения стабильной детали заранее в широком диапазоне Механические свойства, его линейность и отсутствие самодвижения в однофазном режиме.
Асинхронный исполнительный двигатель должен работать со стабильной частью механических свойств в полном диапазоне скоростей от нуля до максимума. Людмила Фирмаль
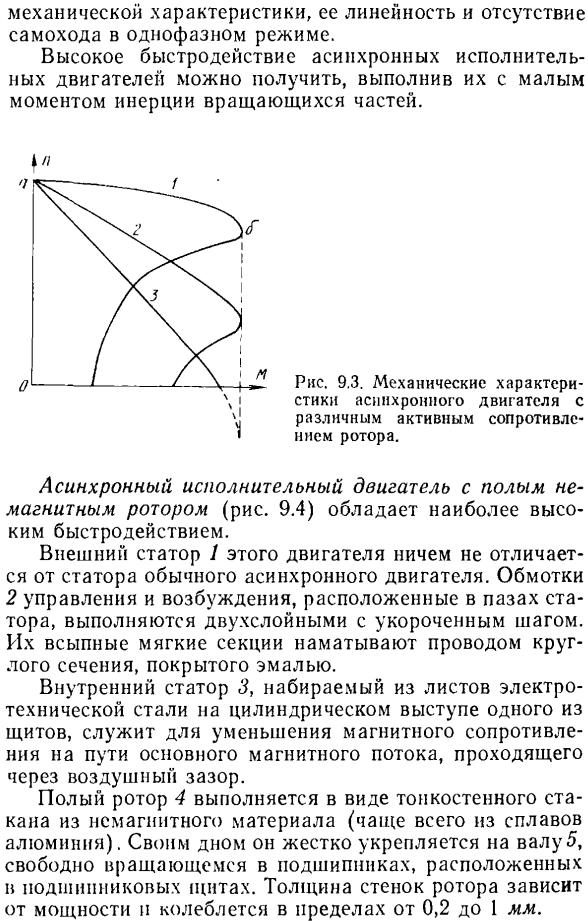
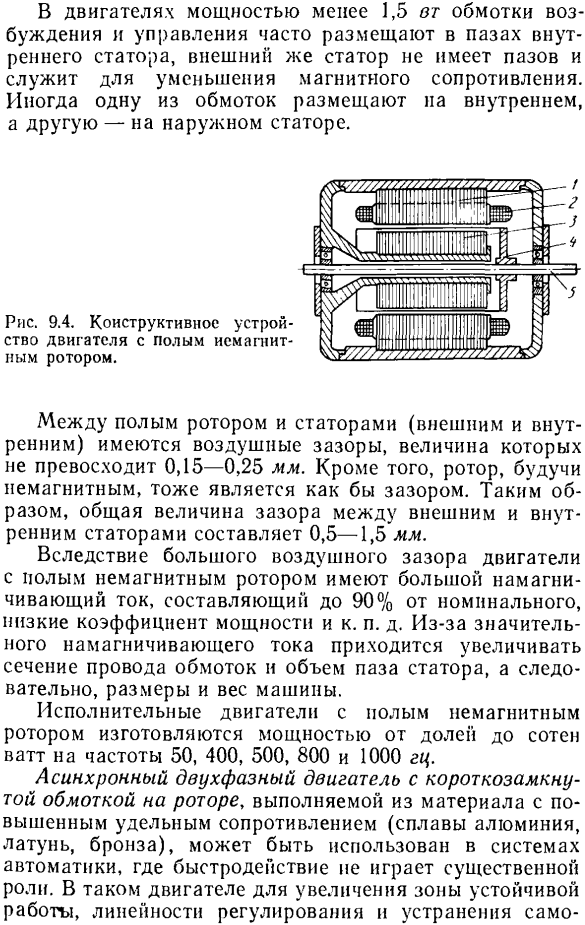
- Быстродействующие асинхронные приводы получают путем их запуска при малом моменте инерции вращающейся части. Рис. 9.3.Механические свойства асинхронных двигателей с различным сопротивлением Ротора. Асинхронный двигатель с полым немагнитным Ротором (рис.9.4) имеет максимальную скорость вращения. Внешний статор 1 этого двигателя ничем не отличается от традиционного статора асинхронного двигателя. Обмотка управления и возбуждения 2 в пазу статора выполнена двухслойной с укороченным шагом. Их свободные и мягкие части обмотаны проволокой круглого сечения, покрытой эмалью. Внутренний статор собранный из листа электротехнической стали на цилиндрическом выступе 1 экрана 3 способствует уменьшению магнитного сопротивления основного магнитного тракта.
Смотрите также:
