
Оглавление:


Теоремы об изменении количества движения и о движении центра масс
- Точка и системный импульс Одним из показателей движения точки или системы является количество этих движений. Импульс массы точки q представляет собой вектор, равный произведению массы точки m на ее скорость v. q = mv. (4). Импульс точки в физике часто называют импульсом материальной точки. Проекция точки импульса на декартовы декартовы оси: qx = mvx = mx; qy = mvy = my; qz = mvz = mz. (4 ‘) Размер движущегося числа в СИ — кг-м / с или Н-с. Импульс системы Q называется векторной суммой импульса отдельных точек системы.
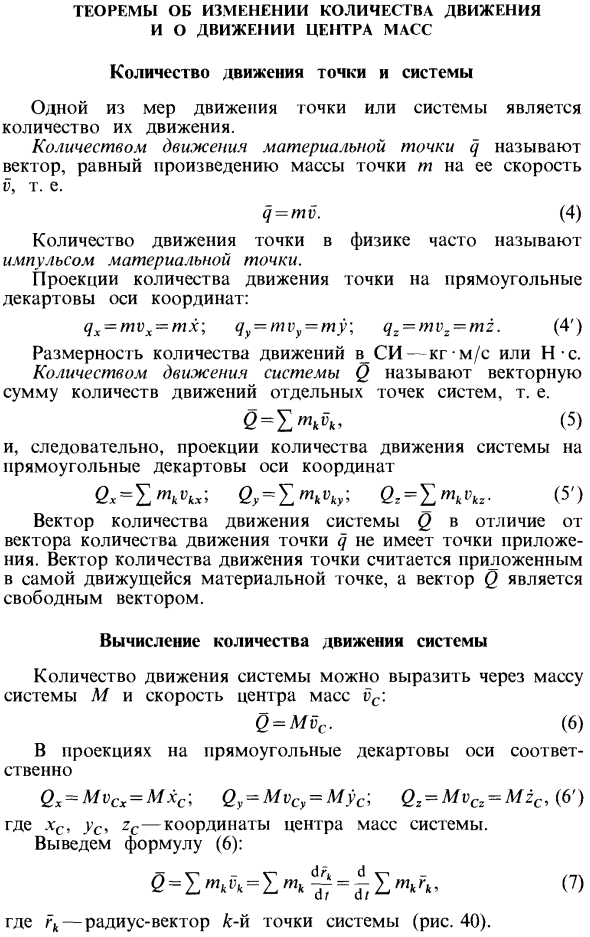
Таким образом, проецируя импульс системы на декартовы декартовы оси & = 1> Lx; (5 ‘) Вектор импульса системы Q не имеет точки приложения, в отличие от вектора импульса точки q. Предполагается, что вектор точечного импульса применяется к наиболее подвижной материальной точке, а вектор Q является свободным вектором. Расчет движения системы Импульс системы может быть выражен скоростью системы массы M и центром масс vc. 6 = Афв. (6) Каждый проецируется на декартовы декартовы оси Qx — MvCx = Mxc; Qy = MvCy = Myc; Qz = MvCz = Mzc, (6 ‘) Где xc, усы и zc — координаты центра тяжести системы. Выведите уравнение (6). Где rk — системный радиус-вектор точки k-ik (рисунок 40).
Затем, чтобы измерить любую силу, действующую на материальную точку, эту точку можно зафиксировать на конце пружины, установив ось пружины в направлении силы и отметив соответствующее удлинение. Людмила Фирмаль
По уравнению радиус-вектора центра тяжести ^ tkkg = Mgs. (8) Подставляя значение статической массы (8) в (7), O = — (Mrc) = M = Mvc, доктор Это связано с тем, что масса Системы М не изменяется при движении системы. О тебе Рисунок 40 Базовый и полный импульс силы Действие силы Γ на материальную точку в течение времени dt можно охарактеризовать так называемым базовым импульсом силы Fdt. Общий импульс силы F за время g или импульс силы S является формулой S = fFdt (9) Проекция импульса силы на декартовых осях дается S.-jf.dG S, -fF, dG S.-jf.d. (9) Импульс блока питания Н • с.
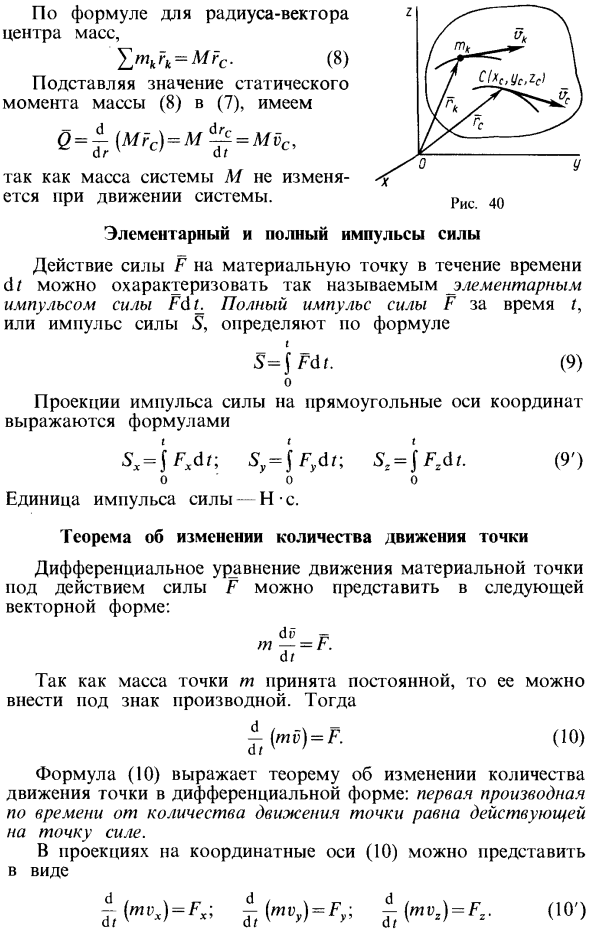
Теорема об изменении момента точки Дифференциальное уравнение движения массы под действием силы F можно выразить в следующем векторном виде: Поскольку масса точки m постоянна, ее можно ввести под знаком производной. тогда = (10) Уравнение (10) выражает теорему об изменении импульса точек в дифференциальной форме. Первая производная импульса точки равна силе, действующей на точку. (10) можно выразить следующим образом в проекции на оси координат. д-р д-р в дт (Ю) Проект обеих частей Умножение dz с обеих сторон (10) дает другую форму той же теоремы, дифференциальную форму теоремы об импульсе. d (mi>) = Fdr, (11).
То есть производная импульса точки равна базовому импульсу силы, действующей на точку. (11) На координатной оси, d (Wwx) = Fxdr; ‘| d (™,) = F, dr;> (11 ‘) d (mvI) = FIdr. J Объединение обеих частей (I) от нуля до t (рисунок 41) mv — mv0 = S, (12) Где v — скорость точки в момент времени t. d0 — скорость при t = 0; S — импульс силы во времени. Выражение вида (12) часто называют конечной (или интегральной) формой импульсной теоремы. Изменение импульса точки за произвольный период равно импульсу силы за тот же период. В проекции на оси эта теорема может быть выражена как: от mvx-mvOx до Sx, mvy-mvOy = S, -, mv2-mvOz = S2. (12 ‘) В случае материальных точек теорема об изменении импульса в любой форме существенно не отличается от дифференциального уравнения движения точки.
Теорема об изменении импульса системы Помимо одного важного момента, мы выводим теорему об изменении импульса различных типов систем. Приложите внешние и внутренние силы к системной точке. Затем вы можете применить теорему к изменению импульса для каждой точки, например, в виде (10) (см. Рисунок 40). -d (мкгD = D- ‘+ L’1, k = 1,2, …, N. дт * Суммируйте правую и левую части этих соотношений во всех точках системы и считайте, что сумма производных равна сумме производных, которые нужно получить. Потому что, определяя характеристики внутренних сил и импульса системы, E ^ ‘= 0; £ tL = b. Вышеуказанная связь может быть выражена в виде dQldt ^ F ^. (13) Уравнение (13) является теоремой об изменении импульса дифференциальной системы.
Производная по времени от импульса системы равна векторной сумме всех внешних сил, действующих на систему. Проекция на декартовы декартовы оси d2x / dz = £ F £>; de, / dz = £ Fl? d & / dz = £ F &, (13 ‘) То есть производная по времени проекции импульса системы на координатную ось равна сумме всех внешних силовых проекций системы на одну и ту же ось. Умножение обеих частей (13) на dz дает теорему об импульсе для дифференциальной системы. Другими словами, производная импульса системы равна векторной сумме основного импульса всех внешних сил, действующих на систему. Для проекций на оси эта теорема принимает вид d2x = Zflxd ‘; dQ ^ Fftdr, dQ ^ F ^ dt.
Если вы вычислите интеграл с обеих сторон (14 ‘) (14) по времени от нуля до Z, вы получите теорему импульса для системы в конечной или интегральной форме. е-бо-эч «.ня Где Qo — импульс системы в момент z = 0. Q — количество движения в момент времени Z. 51е ‘- воздействие внешней силы, действующей на k-ую точку времени z. Sle | = f Fle’dz. Импульсная теорема для окончательного вида системы формулируется следующим образом: Изменение импульса системы в любой момент времени равно векторной сумме всех импульсов внешних сил, действующих на систему одновременно. (15) Согласно проекции на прямоугольную ось, e, ->, — £? О? ) Внутренняя сила системы не оказывает непосредственного влияния на изменение, поскольку она явно не включена ни в одну форму теоремы об изменении импульса системы.
Количество движения системы. Они могут только косвенно влиять на изменения импульса внешними силами. Из теоремы об изменении импульса точки и системы при определенных условиях для внешних сил можно получить так называемый первый интеграл дифференциальной системы точек и системы. Эти начальные интегралы называются законами сохранения импульса или осевой проекцией импульса. Эти законы сохранения рассматриваются одновременно для одной точки и одной системы, а материальные точки рассматриваются как механическая система, состоящая из одной точки.
Закон сохранения импульса Закон сохранения импульса системы является частным случаем теоремы об изменении импульса системы в соответствии с характеристиками системы внешних сил, приложенных к рассматриваемой механической системе. Получено как особенность. В этом случае внутренние силы могут быть произвольными, так как они явно не влияют на изменение импульса системы. Возможны два особых случая. 1. Если векторная сумма всех внешних сил, приложенных к системе, равна нулю, т. Е. £ Л, е´ = 0, из теоремы об изменении импульса системы, например, в виде (13) Q = const (16).
Этот закон (точнее, частный случай теоремы) формулируется следующим образом: если главный вектор внешней силы системы равен нулю, импульс системы постоянен по величине и направлению. Согласно этому закону в проекции на координатную ось 2 «» ^; 2, = C2; £ = C3, (16 ‘) Ct, C2 и C3 являются постоянными значениями. Соотношения (16) и (16 ‘) включают производные, которые не выше первого порядка координат момента времени, и не включают производные второго порядка этих координат. Поэтому эти соотношения являются первыми интегралами дифференциальных уравнений системы (3). 2. Произвольные координатные оси Ox, r основного вектора внешней силы. E. Если проекция на DG1x = 0 равна нулю, из (13 ‘) bx = const. (17).
Уравнение (17) является законом сохранения системной проекции импульса. Если проекция любого главного вектора внешней силы системы на любую ось равна нулю, Проекция импульса на одну и ту же ось является постоянной. Принцип реактивного движения объясняется применением закона сохранения импульса системы. Например, предположим, что ваша система состоит из твердого тела с двумя неподвижными соединениями, не имеющими внешних сил. Во-вторых, в рассматриваемой системе импульс всегда постоянен и равен нулю. Предположим, что во время взрыва сквиба скорость vt сообщается первому объекту массой L / 1.
Далее скорость второго объекта массой M2 определяется из закона сохранения импульса. Q = Mt i> 1 + A / 2v2 = const = 0 Поэтому То есть второе тело движется в противоположном направлении от первого тела. Если соединение препятствует его движению, рассматриваемое тело с некоторым усилием толкает это соединение в направлении скорости t> 2. Эта сила называется реактивной. В реактивном двигателе выделяется газ, который выходит из сопла двигателя на высокой скорости (приблизительно от 2 до 2,5 км / с). Удобно применить теорему, которая каким-то образом изменяет импульс, для точного решения задачи в определенных случаях, но она также применима и к общему случаю.
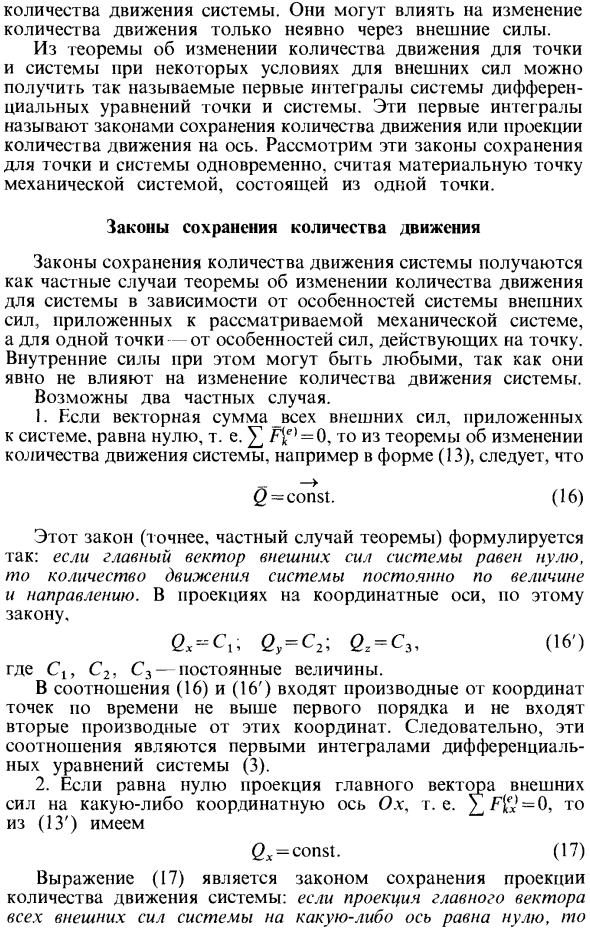
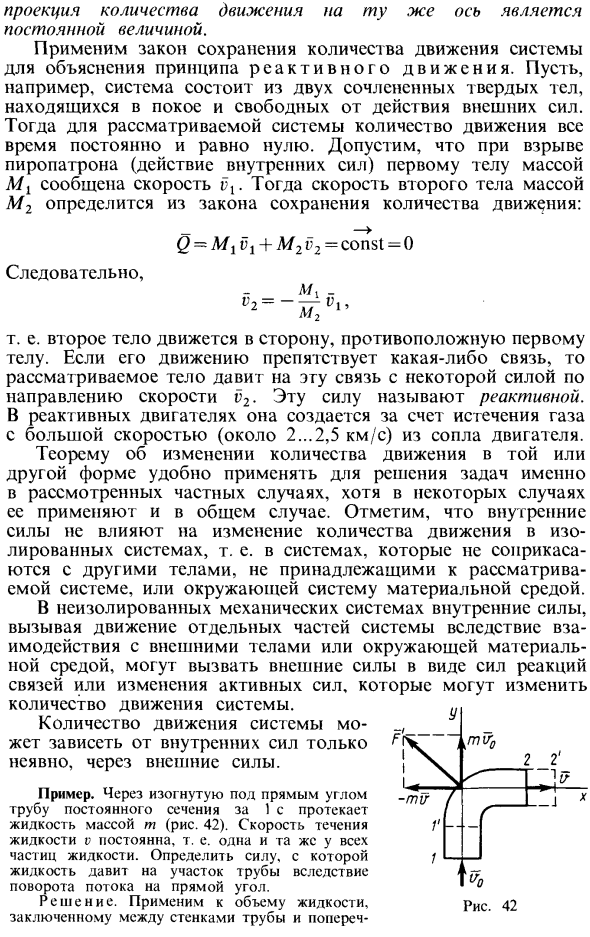
Обратите внимание, что внутренние силы не влияют на изменение импульса изолированных систем, то есть систем, которые не находятся в контакте с другими объектами, которые не принадлежат рассматриваемой системе или материальной среде, окружающей систему. В неизолированных механических системах внутренние силы, которые вызывают движение отдельных частей системы при взаимодействии с внешними объектами или окружающими материальными средами, могут вызывать внешние силы в виде сил реакции Разделы f и 2, теорема об изменении импульса пены Рисунок 43.
- Импульсная теорема для периода, равного небольшому, точка жидкости из секции I сдвигает расстояние 1-1 и занимает позицию, а точка жидкости из секции 2 занимает позицию 2 . Согласно выбранной теореме об импульсе (А) Где Qo — импульс жидкости, заключенной между секциями 1 и 2. g импульс жидкости: ожидание раздела / ‘и 2’; Одна заданная стенка трубы Жидкость. Проекция (б) Давление жидкости F ‘действие и анти-рыхлый Отрегулировать! Движение листьев Гидравлическое давление F ‘юридическая схема.
Если топливо сгорает, в реактивном двигателе образуется газ, поперечное сечение 2 / образуется в трубе без прохождения через жидкость и отводится через поперечное сечение 2 (рис. 43), сила Г по (6) равна величине F ‘будет = -Mv. Эта сила r является частью реактивной мощности двигателя из-за выделения продуктов сгорания из двигателя, являющегося источником газа. Другая часть реагента «Я 2» (п-пэ) равна S, Объяснение перепада давления и давления газа, вытекающего из сопла В окружающей среде. Где 5 — область вывода раздел форсунка + (P-p «) s. В этом направлении сила реакции I всегда противоположна скорости газа v, покидающего двигатель.
Чтобы применить общую формулу, нужно сделать эту плоскость плоскостью x, чтобы ось x проецировалась на плоскость x вектора Oy угловых скоростей, которые одинаково параллельны угловой скорости Земли. Людмила Фирмаль
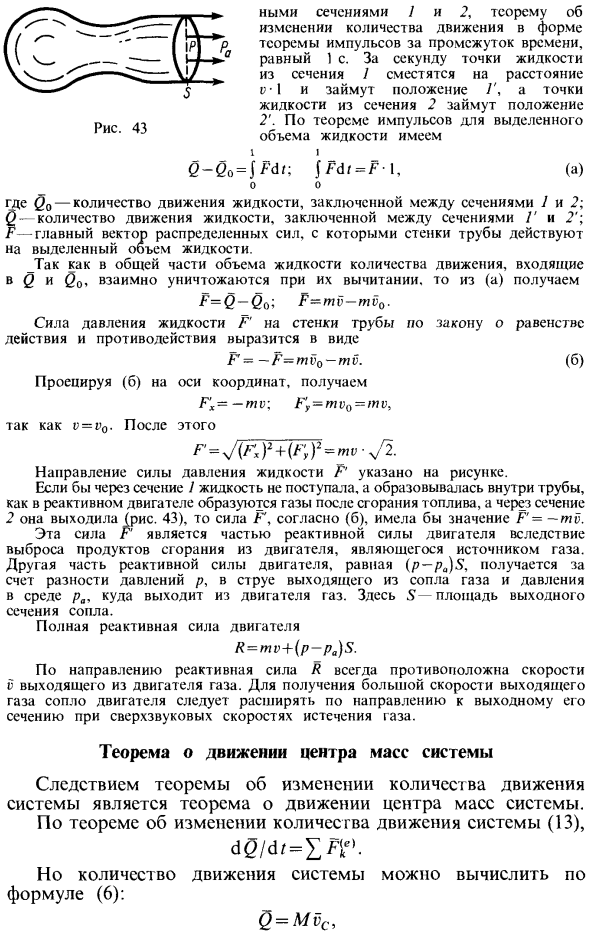
Для получения большой скорости необходимо выходить из поперечного сечения со сверхзвуковым потоком газа. Теорема о движении центра тяжести системы Результатом теоремы об изменении импульса системы является теорема о движении центра тяжести системы. DQ / dt ^^ — по теореме об изменении импульса системы (13) Однако величина перемещения системы может быть рассчитана по уравнению (6). Q = Mvc, Где vc — скорость центра тяжести. z M — масса системы.
Подставляя (6) в (13) и учитывая, что масса системы постоянна / включена, получим теорему движения / центра масс в векторном виде. MdA.Vrl- ’. (18) где ac — ускорение центра тяжести , Рисунок 44 Теорема о движении центра тяжести формулируется следующим образом: Центр тяжести системы движется аналогичным образом. Если все внешние силы, приложенные к рассматриваемой системе машины, действуют на точку, ее масса равна материальной точке, которая равна общей массе системы.
Проекция (18) на декартовы декартовы оси (рис. 44) дает дифференциальное уравнение для движения центра тяжести. > (18’1 где xc, усы, zc — координаты центра тяжести. Из теоремы о движении центра тяжести можно получить те же результаты, что и закон сохранения импульса и закон проекции импульса на ось. 1. Когда главный вектор внешней силы, действующей на систему, равен нулю, то есть E ^ e) = 0, ускорение центра тяжести ac равно нулю из (18), поэтому скорость центра тяжести vc постоянна. Модуль и направление, то есть центр масс, движутся по инерции линейно и равномерно или являются стационарными.
В частности, при скашивании в первый момент он отдыхает до тех пор, пока главный вектор внешней силы не станет равным нулю. 2. Если проекция главного вектора внешней силы, действующей на систему, например на ось Ox, равна нулю, ELech ‘= o, Из (18 ‘) проекция ускорения центра масс xc на эту ось равна нулю, поэтому проекция скорости центра масс является постоянной, то есть pCx = lc = const. Кроме того, в первый момент, если vCx = 0, xc = const, то есть координата xc центра масс ns изменяется по мере движения системы.
Внутренние силы явно не влияют на движение центра тяжести. Рисунок 45 Они могут влиять только неявно, Через внешнюю силу. В результате невозможно вывести из равновесия или изменить центр тяжести системы только с помощью внутренних сил без внешних сил. Однако внутренние силы неизолированной механической системы создают движения отдельных частей системы, вызывая взаимодействие с внешними объектами, вызывая внешние силы для реакций связывания и изменяя активные силы.
В результате движение центра тяжести изменяется или баланс теряется. Люди должны стоять на абсолютно гладкой горизонтальной поверхности рядом с телом, приклеенным к этой плоскости. Поскольку внешняя сила не действует на человека в горизонтальном направлении, человек не может сбалансировать центр тяжести в этом направлении с внутренней силой. Однако люди могут убрать руки с препятствий. Другими словами, внутренняя сила может заставить внешнюю силу реагировать на препятствие и перемещать центр тяжести горизонтально.
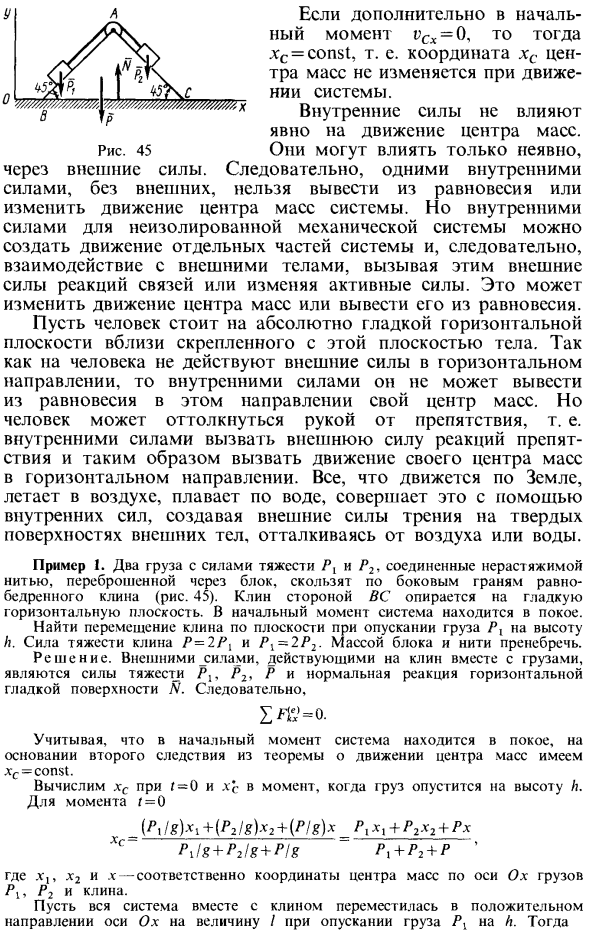
Все, что путешествует на земле, летит в небе и плавает на воде, делает это с помощью внутренних сил, создавая внешнюю силу трения на твердой поверхности внешнего объекта, начиная с воздуха или воды. Пример 1. Две нагрузки, гравитация P и P2, связаны нерастяжимой нитью, которая проходит через блок и скользит по сторонам равнобедренного клина (Рисунок 45). Клиновая сторона самолета находится на ровной горизонтальной поверхности. В первый момент система остановлена.
Если мы уменьшим нагрузку P до высоты L, мы найдем смесь клиньев вдоль плоскости. Гравитация клина P = 2PX и PX = 1P2. Массы блоков и нитей игнорируются. Решения. Внешняя сила, действующая на клин вместе с нагрузкой, является силой тяжести P2. Нормальная реакция P2, P и горизонтальной гладкой поверхности /? так NJM Учитывая, что система не работает в первый момент, Основываясь на втором следствии теоремы о движении центра тяжести, Вычислите xc при r = 0 и вычислите Xc в тот момент, когда нагрузка падает до высоты L. {Pllg) xi + (P2lg) x2 + (Plg) XP, Xi + P1X2 + PX Я \ lg +? 2lg + plg P, + Pr + P.
Координаты центра тяжести по оси О груза соответственно С помощью клина система переместила значение I в положительном направлении оси Ox, когда нагрузка P была снижена на h. тогда л-ч) + р (х + л) , /> 1 (x1 +/- L) + / ’2 (л Xc ~ P, + P2 + P Товары вдоль клина перемещаются вправо / вправо и движутся вдоль отрицательного направления A от оси Ox с заданным углом клина 45 ° вдоль клина, P, (l-h) + P2 (l-h) + PI = 0 Отсюда /. (/ ’| + /> R) L = (gL + ^ a) * P, + P2 + P 2P2 + P2 + 4P2 Поскольку количество / оказалось положительным, Клин фактически перемещается вправо в положительном направлении оси Ox.
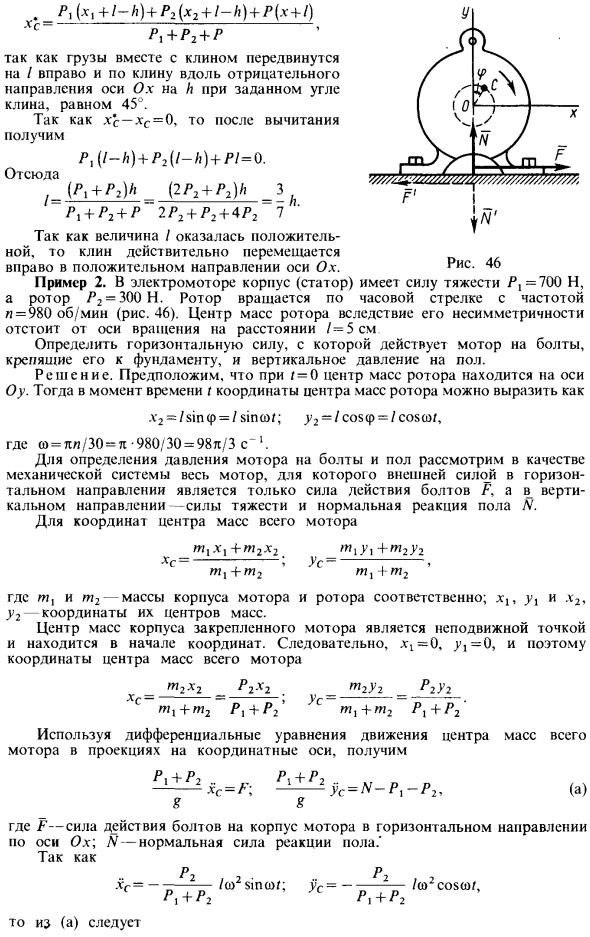
Пример 2. Корпус электродвигателя (статор) Pt = ‘IW N Ротор P2 = 300н. Ротор вращается по часовой стрелке с частотой n = 980 об / мин (Рисунок 46). Центр тяжести из-за асимметрии ротора находится на расстоянии 1 = 5 см от оси вращения Определяется горизонтальная сила, действующая на болт, которым двигатель крепится к фундаменту, и вертикальное давление на пол. Решения. Пусть / = 0 и центр тяжести ротора находится на оси Oy. Далее, в момент времени t координаты центра тяжести ротора могут быть выражены как: x2 = / sinφ = / sinω «; y 2 = 1 coscp = / coscot. Здесь ω = li / 30 = i-980/30 = 98l / 3s * ′.
Чтобы определить давление двигателя на болт и пол, весь двигатель, горизонтальная внешняя сила которого является действием только болта F, считается механической системой. О координатах центра мА Где t и t2 — массы корпуса двигателя и ротора соответственно. у2 — координаты центра тяжести. Центр тяжести неподвижного корпуса двигателя является фиксированной точкой и находится в начале координат. Следовательно, X] = 0, 3’1 = 0, поэтому координаты двигателя.
Используйте уравнение уравновешивания для всех центроидов Проекционный мотор на осях получим P, + P2 P1 + P2 .. „ -2- xc = F; ——— yc = N — P, -P2. г г Где F — приложенное усилие болта корпуса двигателя в горизонтальном направлении вдоль Oh. Н — нормальная сила — ■ 5 — ^ — / co2 сервер ^ 1 + ^ 2 В сопровождении ОТ (а) (А) F = — / e ”2sin 0. Дифференциальное уравнение поступательного движения твердых тел Из теоремы о движении центра тяжести системы получаем дифференциальное уравнение для поступательного движения твердого тела.
Смотрите также:
Задачи по теоретической механике
| Простейшие свойства внутренних сил системы | Количество движения точки и системы |
| Дифференциальные уравнения движения системы | Вычисление количества движения системы |
