
Оглавление:


Теорема об изменении кинетического момента системы в относительном движении по отношению к центру масс
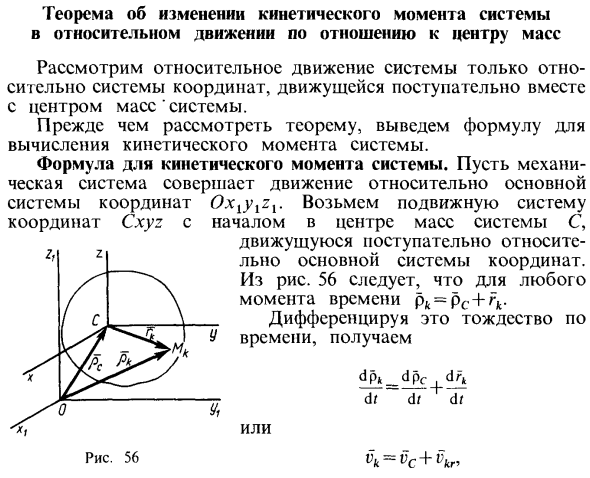
- Рассмотрим относительное движение системы только для системы координат, которая движется постепенно с центром тяжести системы. Прежде чем рассматривать теорему, выведем формулу, которая рассчитывает момент движения системы. Уравнение системного момента движения. Переместите механическую систему относительно базовой системы координат Oxlylzl. Рассмотрим движущуюся систему координат Cxyz, которая постепенно движется относительно основной системы координат с центром тяжести системы C в качестве начала координат.
На рисунке 56 это p ^ Pc + r * -в любое время Различая эту идентичность по времени, dpj_dpc_j_drl dr dr dr или Рис. 56 * ^ = ПК + * ’* g> Где vk — абсолютная скорость точки Mk. vc — абсолютная скорость центра тяжести. iJltr = dft / dr — относительная скорость точки MK относительно движущейся системы координат Cxyz. Во время поступательного движения движущейся системы координат ее угловая скорость r равна нулю, и согласно формуле Бора полная производная по времени от радиус-вектора r совпадает с локальной производной, равной относительной скорости.
Такое вращение обусловлено тем, что локус всех точек тела при этом движении располагается на поверхности сферы, которая описывается из неподвижной точки. Людмила Фирмаль
Согласно определению импульса Ko для неподвижной точки O, абсолютное движение системы для системы координат Oxly1zl согласно уравнению (20) Ко = Zpkxmkvk. Подстановка значений pb и vk в это выражение дает небольшое преобразование L „-Pcx + r, pc xZm, x f, .. (36) В этом уравнении bmk = M — масса системы. Кроме того, два последних члена равны нулю. Конечно, определив вектор радиуса центроида для этого центроида, 0 = rc = £ / и * 4 / M Следовательно, btk = 0 и последний член в (36) также равен нулю. Вы можете преобразовать другой термин заранее: PeX ^ .J-PexAp ^). Поскольку btkk = 0, этот член также равен нулю. Уравнение (36) принимает следующую окончательную форму: K0 = pcxMvc + KF, (37) Где K ^} = ‘Lrkxmkvkr.
- Величина K ^ 1 является моментом движения системы относительно центра тяжести в случае относительного движения относительно центра тяжести, то есть системы координат, движущейся постепенно в системе координат Cxyz. Уравнение (37) показывает, что момент движения абсолютного движения системы относительно неподвижной точки O относительно той же точки, если общая масса системы сконцентрирована в относительном центре масс системы и момент движения системы относительно центра масс. Относительно движущейся системы координат, которая постепенно перемещается вместе с центром тяжести, она показывает, что она равна векторной сумме момента движения центра масс.
Для абсолютного движения системы и неподвижной точки O теорема об изменении момента движения имеет вид Здесь при подстановке значений pt и Co в уравнении (37) и дифференцировании членов в группы результат будет следующим. + ■ L «. Переместите первый член справа налево и примите его во внимание -x Mvc = vc x Mvc = Оdr s s s После объединения полученных членов как векторное произведение параллельных векторов pcx [m5-EHT>] + ^ .EX, xL В этой формуле формула в квадратных скобках равна нулю (18) на основе теоремы о движении центра тяжести системы (18), поэтому формула принимает следующий вид: или dRP / dt = L ^, (38).
Можно поставить обратную задачу: зная плоскостное движение, при котором проекция точки на ось x равномерно движется вдоль этой оси, можно определить направление движения, которое может вызвать это движение. Людмила Фирмаль
Где — это ключевой момент всего, что находится снаружи Сила в центре тяжести. Уравнение (38) представляет собой теорему, которая учитывает изменение системного момента движения относительно центра тяжести для относительного движения системы относительно системы координат, которая постепенно перемещается вместе с центром тяжести. Он сформулирован так, как будто центр тяжести является фиксированной точкой. Эта теорема используется для изучения вращающейся части плоского движения и движения свободного твердого тела вокруг центра тяжести.
Смотрите также:
Задачи по теоретической механике
| Движение точки под действием центральной силы. Теорема площадей | Дифференциальные уравнения плоского движения твердого тела |
| Движение точки под действием центральной силы | Теорема Резаля |
