
Оглавление:



Теорема об изменении кинетического момента системы
- Если к системным точкам приложить все внешние и внутренние силы (рис. 48), то теорема об изменении момента движения может быть выражена в виде (23) для каждой точки в системе. jhx-.M-r.xfl — ’+ f.xFl. «* -1. 2 ….. IV. Суммируя правую и левую части этих соотношений во всех точках системы и заменяя сумму производных от общей производной, получаем: ….. ………. Из-за природы внутренних сил, Er (, xP [‘> = 0, и определение системного момента движения, Er1htl = «v, dK0 / dt = EfkxFle>.
Главный момент всех внешних сил, а именно Если L ^ = lM0 (F ^) = ZrkxF ^, теорема об изменении системного момента движения может быть выражена следующим образом: dR0 / dt = L ^. (24) Следовательно, первая производная системного момента движения для любой точки равна векторной сумме моментов внешних сил, действующих на систему для той же точки. Эта теорема, включают в себя Ko момент движения системы в относительном движении к инерциальной системе отсчета, момент движения и момента внешней силы вычисляется по отношению к неподвижной точке О в этой системе отсчета вы.
Известно, что произвольное движение системы координат в виде свободного твердого тела может быть представлено как поступательное движение, например, с точкой о, вращение вокруг этой точки и с полюсом. Людмила Фирмаль
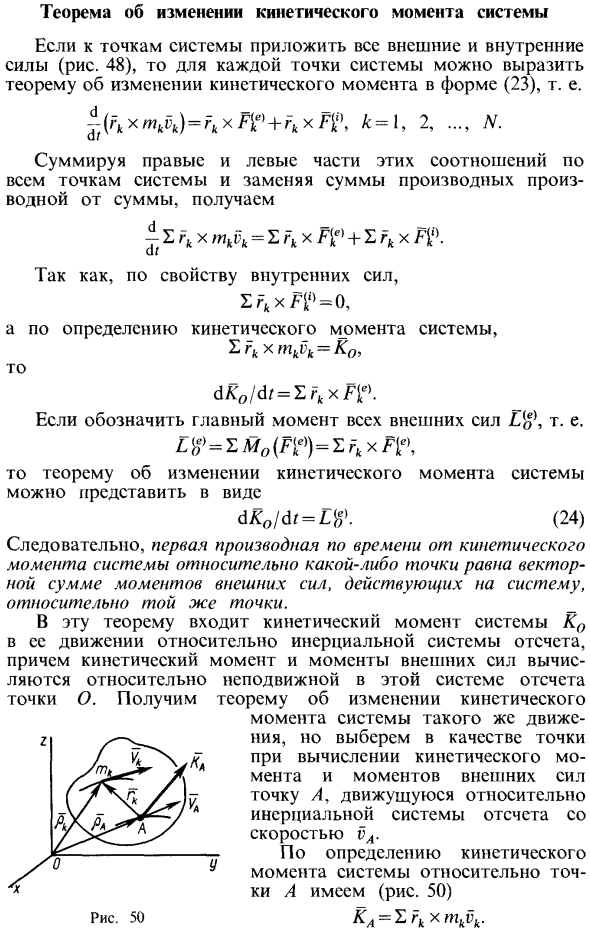
Вычисляет момент движения и точку внешней силы A по отношению к инерционной системе отсчета со скоростью vA. Согласно определению момента движения системы относительно точки A, КА = Zrkxmkvk. Рисунок 50 Вычисляет производную по времени момента движения космического аппарата в соответствии с правилами дифференцирования векторного произведения. получить + f, (Ft ‘+ H1)] — », x Z + L F, x FP. _ _ _ др, дп, дп. rk = p4-rl; = vt-vx; ^ 5 = ^ ‘+ ^; vtxmA = 0; Er * x / φ = 0. Если Q = S mkvk = Mvc, dKA / dz = -vAxMvc + Erkx или dKx / dz = Mvc x vA + L’a Рассмотрим частный случай этой теоремы. 1.
- Если точка A совпадает с центроидом C, то Mvcxvc = 0, и теорема принимает вид dXc / dr = £ te) — 2. В случае жесткого плоского движения, если в качестве точки A выбран центр мгновенной скорости P, то pl = pp5 £ 0. Именно здесь vP — это скорость в центре мгновенной скорости вдоль стационарного центра тяжести, если учитывать, что скорость точки тела, которая совпадает с точкой P, равна нулю, в отличие от нуля.
Очевидно, что vP параллелен vc, то есть vPxMvc = 0. Тангенс центра тяжести и локус центра тяжести параллельны, или, что то же самое, центр тяжести перпендикулярен центру тяжести точки P. dKP / dt = I%>. В этих частных случаях теорема об изменении момента движения абсолютного движения имеет ту же форму, что и неподвижная точка O для движущегося центра центра тяжести и мгновенного центра скорости при плоском движении твердого тела в рассматриваемом случае.
Введение их в основы классической механики вместо ньютоновских аксиом — это новый подход к проблемам, присущим ньютоновской аксиоматической механике, в том числе к проблеме гравитационных парадоксов. Людмила Фирмаль
Показывает что у тебя есть. Внутренние силы напрямую не влияют на изменения системных моментов движения. Они могут влиять только на внешние силы, то есть неявно. Проекция (24) на декартовы декартовы оси дает теорему об изменении момента движения системы вокруг этих осей. dKx / dt = L ^; d ^ / dz = £ <? ’; DKJdt = L» \ (24 ‘) Теорема об угловом моменте позволяет исследовать вращательное движение твердого тела вокруг оси и точки или вращательную часть движения тела для общего движения свободного твердого тела.
Смотрите также:
Задачи по теоретической механике
