
Оглавление:


Теорема об изменении кинетического момента
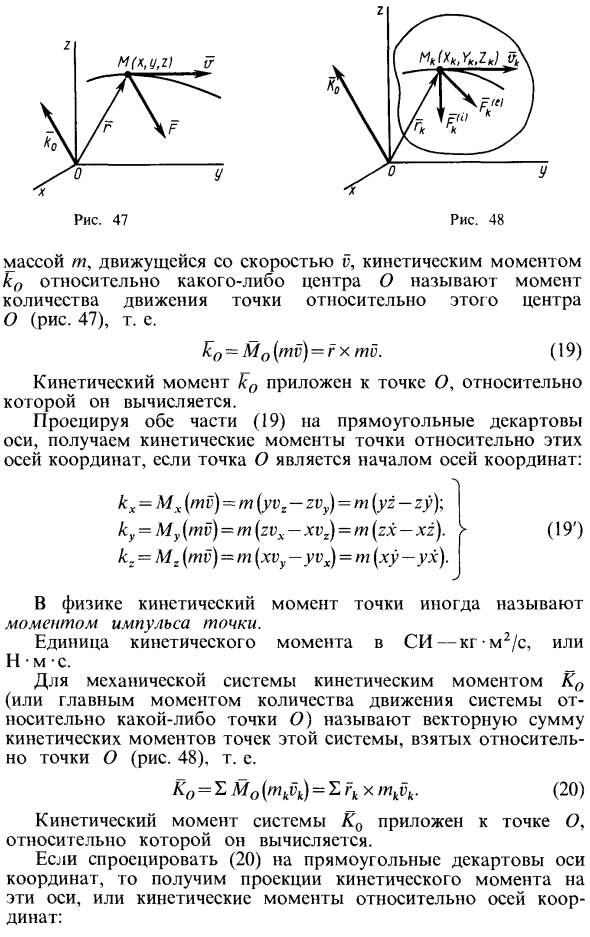
- Наряду с теоремой импульса и импульса как вектора системного момента. Вы можете использовать момент движения или импульс для измерения движения. В случае материальных точек Рисунок 47 Рисунок 48. Движение с массой m, скоростью v, моментом движения Io относительно центра O называется величиной момента. Движение точки относительно этого центра O (рис. 47), то есть ko = Mo (mv) = fxmv. (19). Момент движения k0 применяется к точке O, На это рассчитано. Если обе стороны (19) проецируются на декартову декартову ось, то получается момент движения точки. Если точка O является началом координат осей, относительно этих осей: kx = Mx (mv) = m (yvz — zvy) = m (yz — zy); ky = My (mv) = m (zvx — xv ‘) = m (zx — xz). > (19 ‘) к. = Mz (mv) = m (xvy — yvx) = m (xy — yx).
В физике момент момента точки иногда называют Момент момента. Единица измерения момента движения СИ составляет кгм2 / с или Н м с. Для механических систем момент движения Ко (Или главный момент импульса системы для любой точки O) — векторная сумма моментов движения Точка этой системы взята против точки O (рис. 48), а именно Ko-E Mo (mkv ^ = T.rkx mkvk. (20) Момент движения системы Ко относится к точке O, которая будет рассчитана. Проецирование (20) на декартовы декартовы координатные оси, Получите момент проекции движения на эти оси или момент движения вокруг координатных осей. KX = bMX (mkvk) = Zmk {ykzk-Zkyk); Ky = ZM, (mkvk) = Zmk {zkxk to xkzk) -,> (20 ‘) K, = £ Mz (mkvk) = S mk (V * — Л * ») — при угловой скорости Ось вращения Рассчитаем момент движения твердого тела, момент движения вокруг главной оси вращения при вращательном движении твердого тела.
Относительное остаточное выравнивание материальной точки имеет преимущество перед средой за счет определенного относительного движения материальной точки, массы и силы, приложенной к этой точке. Людмила Фирмаль
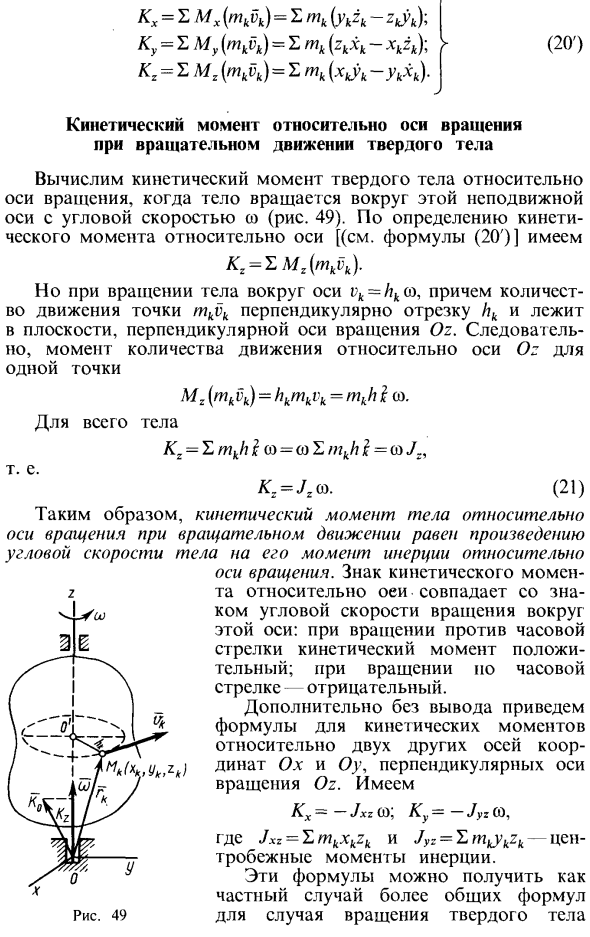
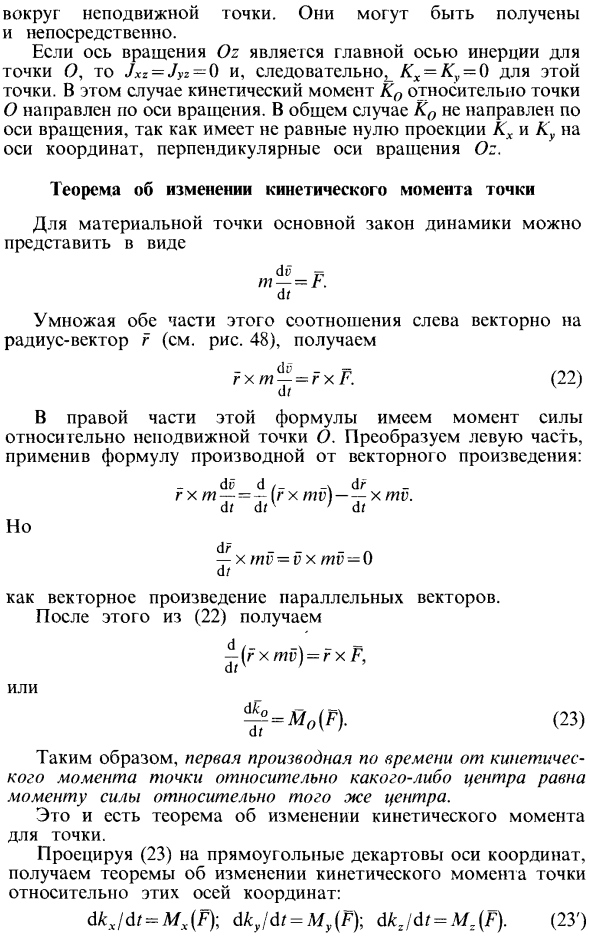
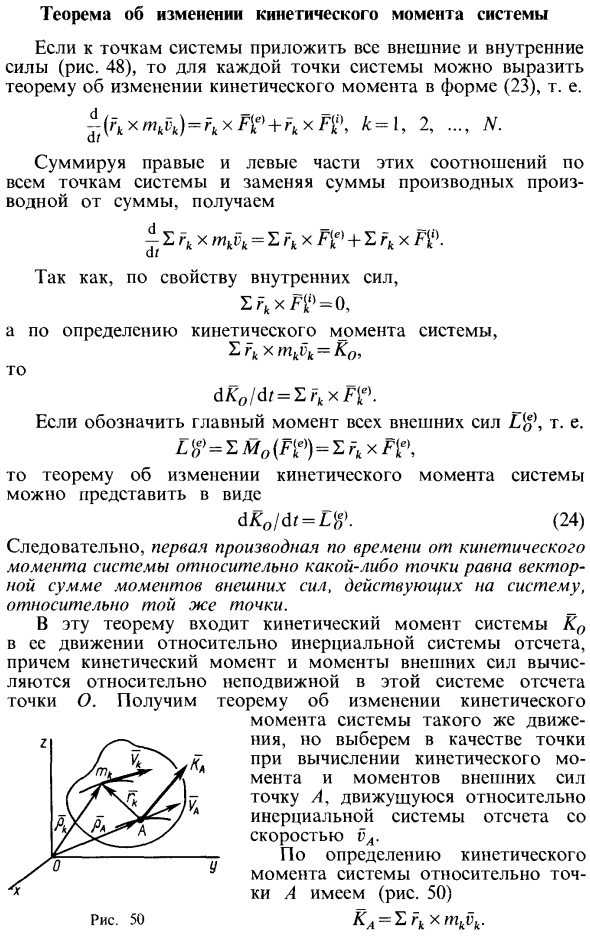
Когда тело вращается вокруг этой неподвижной оси с угловой скоростью ω (рис. 49), оно относительно оси вращения. По определению Существует [[см. Уравнение (20 ‘)] ^ = EL / g (/ yal) момента движения вокруг оси. Но тело это ось vk-hk = 0 Определение системного момента движения, Er1htl = «v, dK0 / dt = EfkxFle>. Главный момент всех внешних сил, т. Е. Если L ^ = lM0 (F ^) = ZrkxF ^, теорема об изменении системного момента движения может быть выражена как dR0 / dt = L ^. (24) так Первая производная по времени системного момента движения для любой точки равна векторной сумме моментов По отношению к внешним силам, действующим на систему, та же точка. Эта теорема включает в себя момент движения системы Ко во всех движениях Относительно инерциальной системы координат отсчета момент движения и момент внешней силы вычисляются относительно стационарно.
В этой точке системы отсчета О мы получаем теорему об изменении момента движения той же системы движения, Точка А движется относительно инерциальной системы как точка для расчета момента движения и момента внешней силы Опорная скорость ВА. KA = Zrkxmkvk получается путем определения системного момента движения относительно точки A (рисунок 50). Рисунок 50 Вычисляет производную по времени момента движения космического аппарата в соответствии с правилами дифференцирования векторного произведения. + ф, (Ft ‘+ H1)] — «, x Z + LF, x FP. _ _ _ Dr, dp, dp. Rk = p4-rl; = vt-vx; ^ 5 = ^’ + ^; vtxmA = 0 Er * x / φ = 0. Учитывая, что Получите Q = S mkvk = Mvc, dKA / dz = -vAxMvc + Erkx или dKx / dz = Mvc x vA + L’a. Рассмотрим частный случай этой теоремы.
Если Точка A совпадает с центром тяжести C, Mvcxvc = 0, теорема dXc / dr = £ te) -2. Для твердых тел выберите мгновенный центр скорости P в качестве точки A и pl = pp5 £ 0. В отличие от мгновенной центральной скорости скорость вдоль фиксированного центра тяжести, а также скорость тела в точке, не равной нулю Соответствует точке P, равной нулю. Очевидно, что vP параллелен vc, то есть vPxMvc = 0. Тангенс центра тяжести Локус центра тяжести параллелен или эквивалентен, а центр тяжести перпендикулярен центру тяжести точки P. dKP / dt = I%>. Эти частные случаи относятся к точке движения центра тяжести и центра мгновенной скорости любой системы. Теорема об изменении момента абсолютного движения в случае плоского движения исследуемого тела Та же форма, что и у фиксированной точки O.
Внутренняя сила напрямую не влияет на изменение момента движения. Система. Они могут влиять только на внешние силы, то есть неявно. Проекция на декартову декартову ось (24) Координаты, теорема об изменении момента движения системы относительно этих осей, т.е. dKx / dt = L ^; д ^ / дз = £ = Если EM1 (Ae) = 0, Kr = Jz (o = const или Jzcd = J2oco0, (27) где Jt и u — момент инерции системы объектов и угловая скорость относительно оси вращения. Любое время /; L0 и Fig. 51 как внешнюю силу или параллельно оси вращения (тяжелая сила (Человек, вес, платформа) или поперек оси (реакция подшипника, если сила трения игнорируется).
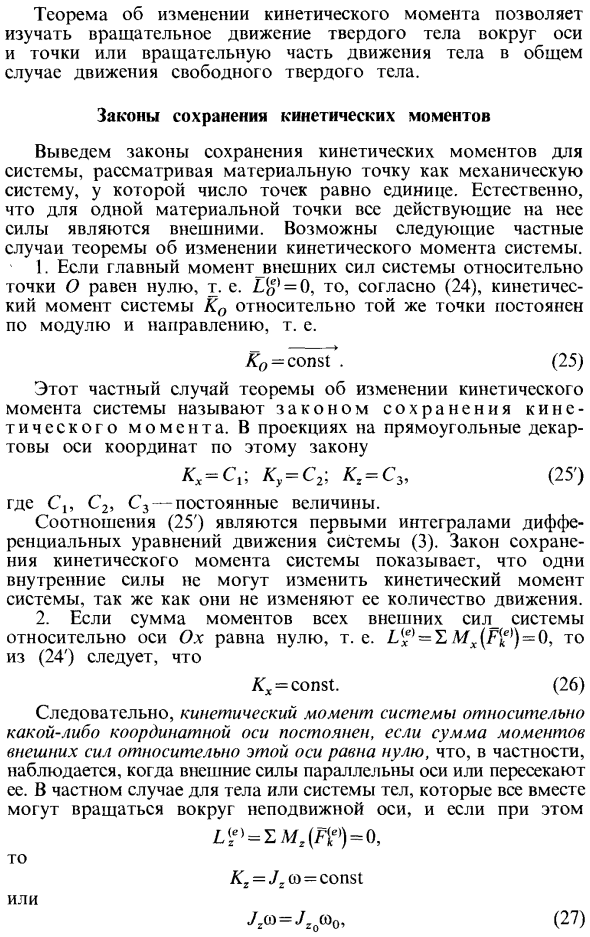
Поэтому люди Например, поднятие утяжеленного рычага в сторону увеличит момент инерции, уменьшит угловую скорость вращения и наоборот. в На самом деле угловая скорость медленная, но всегда уменьшается из-за наличия сопротивления воздуха и трения. Подшипниковая скамья. Пример. Однородный горизонтальный диск с радиусом L P может вращаться вокруг вертикального угла без трения. Если STS на скорости диска, первоначально на расстоянии r от его оси, представляет собой человека с гравитацией P, он обойдет круг с радиусом. Относительная скорость v диск (рисунок 52)? Решения. Угловая скорость диска bi составляет (o0, в зависимости от движения Человеческий драйв стал ш. Поскольку внешняя сила состоит из человека и лица, параллелью является Og (сила тяжести P и P) или Пересечение — это два момента момента движения системы.
Выравнивание полученной формулы движения. Момент, для однородных дисков. Угловая скорость диска за счет движения человека вдоль него уменьшилась на 2P1P ‘/ (RL2 + 2P1g2). Думай о земле вместо диска Движение материального объекта (воздуха, потока воды и т. Д.) Вдоль него с ненулевой проекцией шара и скорости вдоль него При касательной к параллели угловая скорость вращения Земли изменяется. Уменьшите, если прогноз скорости положительный.
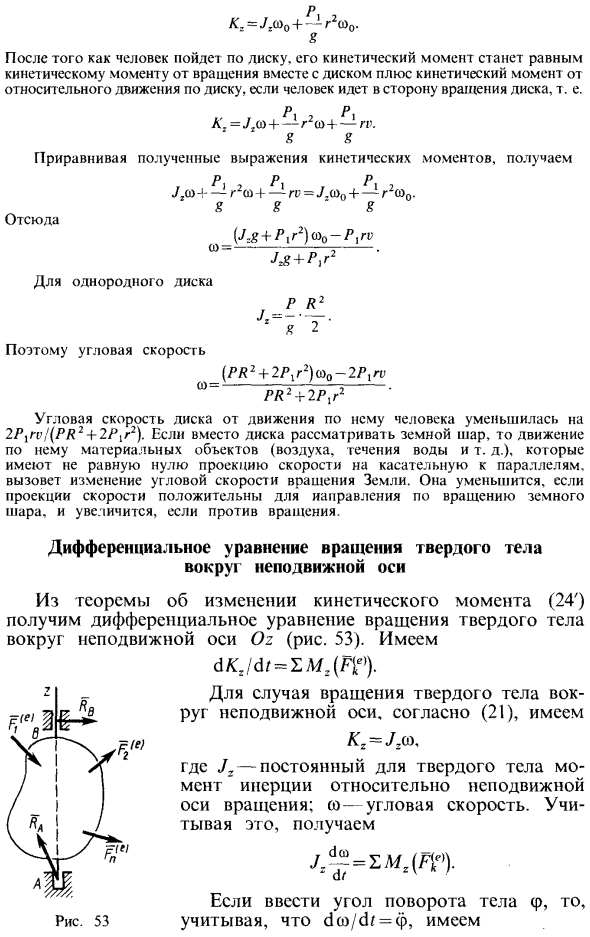
Увеличение дифференциального уравнения вращения твердого тела вокруг неподвижного объекта относительно направления вращения Земли Получить дифференциальное уравнение вращения вокруг твердого тела из теоремы об изменении осевого момента (24 ‘). Неподвижная ось Oz (рис. 53). Есть ли цифра 53 дА? I / dr = 2MI (Flel). При вращении твердого тела вокруг неподвижной оси. По словам (21), Kz = J2a>. Где J — постоянный момент инерции твердого тела относительно фиксированной оси вращения. Скорость. Учитывая это, если ввести угол поворота
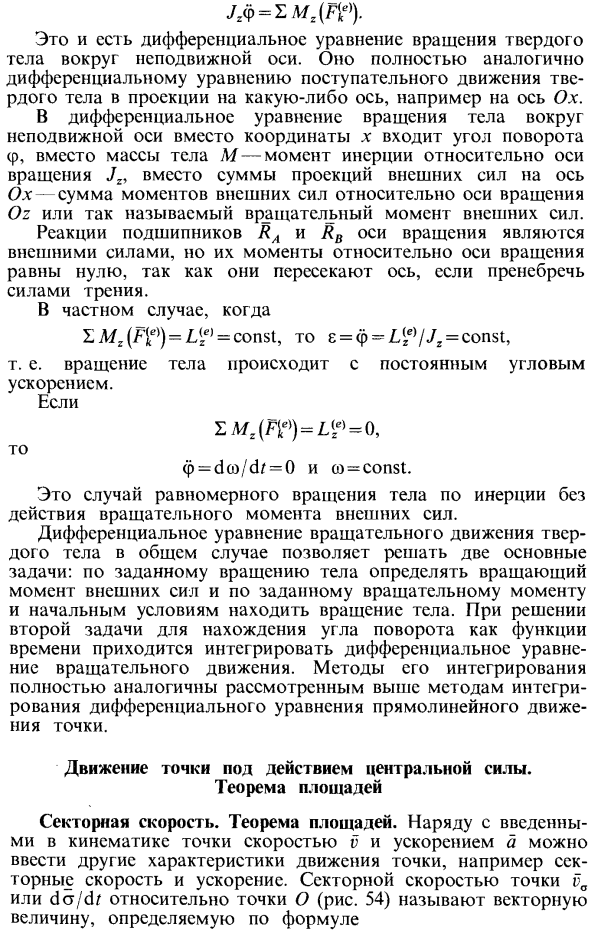
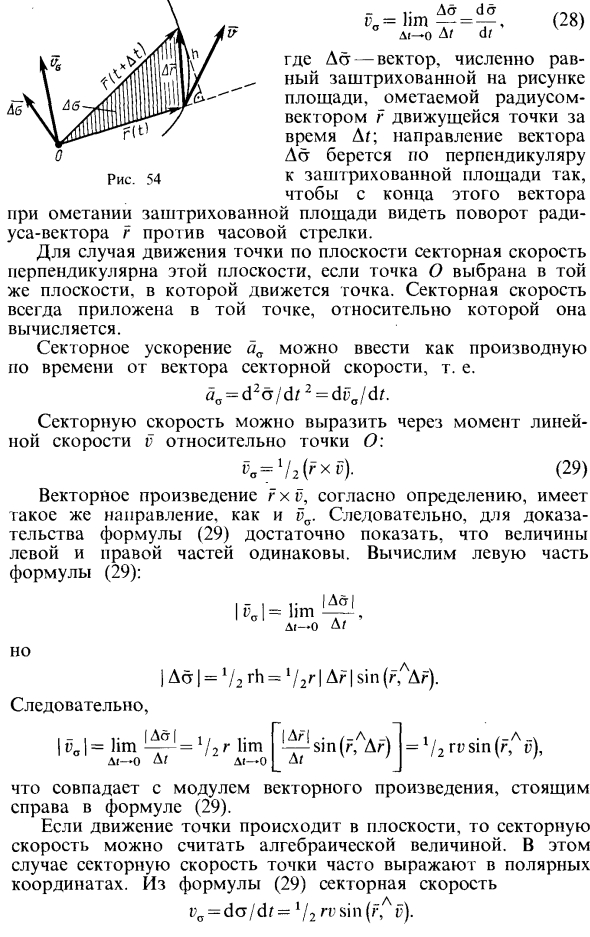
Модуль векторного произведения в правой части уравнения (29). Скорость сектора, если точка движется в плоскости Думайте об этом как алгебраическая величина. В этом случае скорость вращения вентилятора точки часто выражается в полярных координатах. Из формулы (29) Скорость сектора pa = da / df = 1 / 2n) sin (f, p). Но это известно из кинематики точек в полярной системе координат на плоскости (Фиг. 55) t> sin (r, AiJ) = = 2m «i. (31) Следовательно, теорема об изменении точечного импульса (23) может быть выражена как: В форме скорости сектора (32) согласно уравнению (32) теорема об изменении момента движения точки называется теоремой площади. Движение точки под действием центральной силы.
Центральная сила F — это сила с линией действия, когда точка движется. Приложение проходит через ту же точку О, называемую центром центральной силы. Центральные единицы привлекательны (К центру) и отскок (направление от центра). Для центральной силы момент силы равен Поскольку центр равен нулю, то есть Mo (T) = 0, const ‘по теореме об изменении момента движения в точке (23). (33) Б Согласно (33), проекция декартовой системы начинается в точке O на прямоугольную ось: kx = m (yz — zy) = C \; ky = m (zx-xz) = C2 kt = m (xy — yx) = C3. Где Cj, C2 и C3 являются постоянными значениями. Умножьте первое соотношение (33 ‘) на x, второе на y, третье на z Кроме того, O = C1x + C2y + C3z, то есть координаты движущейся точки x, y, z удовлетворяют уравнению плоскости прохождения Происхождение координат.
- Поэтому траектория движения точки под действием центральной силы равна Самолет, который проходит через центр силы. Когда точка движется под действием центральной силы, ^ 0 = const, поэтому выражение (31), я> а = дд / др = конст. Таким образом, t> 0 = do / dz = const = C, (34) или a = o0 + C /. Уравнение (34) является так называемым Интеграция области: когда точка перемещается под действием центральной силы, скорость сектора постоянна, Следовательно, площадь, занимаемая радиус-вектором, пропорциональна времени. Для данного уравнения (30) интеграл по площади (34) имеет вид Полярные координаты могут быть выражены как r2 = const. (35) др » В этой форме интеграл площади.
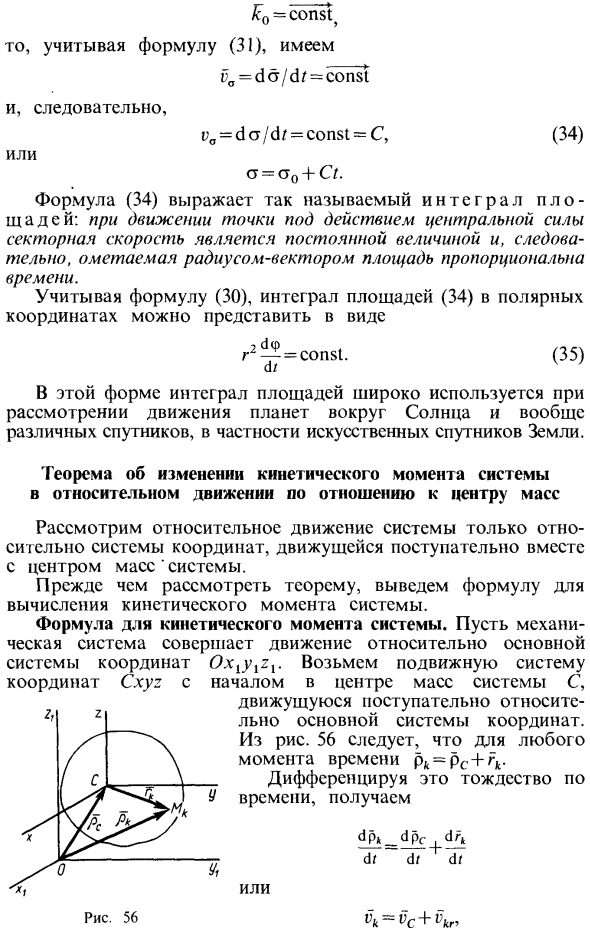
Рассмотрим движение планеты вокруг Солнца и вообще различных спутников, особенно искусственных спутников Земли. теорема Изменение системного момента движения относительно центра тяжести 56 относительно Только относительное движение системы относительно системы координат, которое движется постепенно с центром тяжести системы. Перед Определение уравнения для расчета системного момента движения с учетом теоремы. Уравнение системного момента движения. Переместите механическую систему относительно базовой системы координат Oxlylzl. Используйте мобильную систему Отрегулируйте Cxyz с началом координат в центре масс Системы C и постепенно перемещайтесь относительно основной системы координат.
Согласно этому плану, в книге дается только краткая информация из теории в абстрактной форме-читатель может использовать один из курсов теоретической механики для изучения теории. Людмила Фирмаль
Из рисунка 56 То есть в любой момент времени p (1 = Pc + T | 1. Дифференцируя это тождество по времени, dpl_dpc_ | _dfl, dr dr dr Где vk — абсолютная скорость точки Mk. vc — абсолютная скорость центра тяжести. vkr = drk / dt — относительная скорость точки МК Подвижная система координат Cxyz. При поступательном движении движущейся системы координат ее угловая скорость u равна нулю, По формуле Бора полная производная по времени от радиус-вектора r совпадает с локальной производной, равной относительной скорости. Согласно определению момента движения Ко для неподвижной точки О: Система координат Ox ^ z; согласно уравнению (20), Ko = Zpkxmkvk.
Подставляя значения pb и vk в эту формулу, Из преобразований „-Pcx + pc xZm, x f, .. (36) В этом уравнении btk = M — масса системы. Последние два срок Равно нулю Фактически, определение вектора радиуса центроида для этого центроида дает 0 = rc = £ / и * 4 / M. Следовательно, btk = 0 и последний член в (36) также равен нулю. Другие условия могут быть преобразованы заранее. PeX ^ .J-PexAp ^). Поскольку btkk = 0, этот член также равен нулю. Уравнение (36) принимает следующую окончательную форму: K0 = pcxMbs + 1p, (37) где K ^ ‘=’ Lrkxmkvkr. Величина K ^ 1 является системным моментом движения вокруг центра масс. Система координат, которая постепенно перемещается с центром тяжести, то есть относительно движения к системе координат Cxyz.
Уравнение (37) показывает, что момент движения абсолютного движения системы относительно неподвижной точки O равен Если вся масса сосредоточена в центре масс, то векторная сумма моментов движения центра масс для одной и той же точки Система и системный момент движения относительно центра масс системы относительно движения Система координат, которая движется постепенно с центром тяжести. Теорема об изменении момента движения системы Относительное движение относительно центра тяжести. Для абсолютного движения и неподвижных точек системы теорема об изменении Форма кинетического момента дифференцируется и группируется путем подстановки значений pt и Ko в соответствии с уравнением (37) Получите член, + ■ Л «.
Передайте первый член справа налево и рассмотрите его: -x Mvc = vc x Mvc = Оdrсссas После объединения векторного произведения параллельных векторов, pcx [m5-EGT]] + ^ EX, xL term, В квадратных скобках он равен нулю на основании теоремы о движении центра тяжести системы (18), поэтому формула принимает следующий вид: dRP / dt = L ^, (38) где — главный момент всех внешних сил вокруг центра тяжести. Формула (38) и выражение Рассмотрена теорема об изменении системного момента движения относительно центра масс относительного движения системы Для систем координат, которые движутся постепенно с центром тяжести. Центр тяжести Фиксированная точка. Эта теорема используется для изучения вращающейся части плоского движения и движения свободных твердых тел. Вокруг центра тяжести.
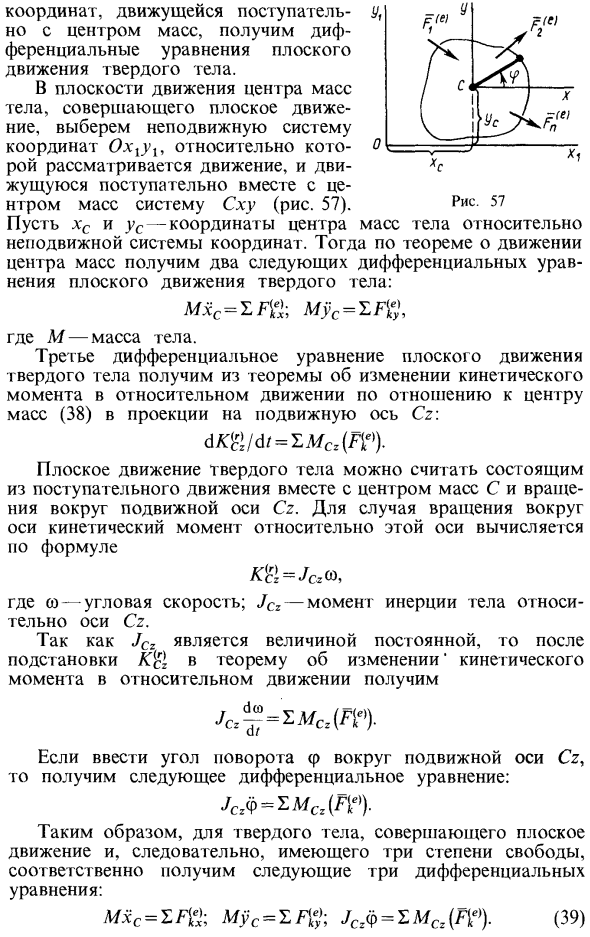
Дифференциальные уравнения для плоского движения твердых тел с использованием теоремы о движении центра тяжести Изменение системного момента движения относительно центра масс системы относительно системы Получите 57 масс тела, плоские дифференциальные уравнения для координат, которые постепенно перемещаются с центром тяжести Сплошное движение. В плоскости движения центра тяжести тела, выполняющего плоское движение, выбирают неподвижную систему Относительные координаты октильтовых координат, где рассматривается движение, и система (Рисунок 57). Пусть xc и yc — координаты центра фиксированной системы координат.
Далее по теореме о движении центра тяжести Следующее дифференциальное уравнение для плоского движения твердого тела: где M — масса объекта. Дифференциальное уравнение третьего порядка В случае жесткого плоского движения оно может быть выведено из теоремы об изменении момента движения при относительном движении. Центр тяжести проекции на движущуюся ось Cz (38): dK ^ ldl = LMC2 (F \ e}). Твердое плоское движение Перемещение и вращение вокруг центра тяжести C и подвижной оси Cz. В случае вращения вокруг оси, кинетическая теория Момент вокруг этой оси рассчитывается по формуле где со — угловая скорость. JCl — Момент инерции объекта вокруг оси Cz. так Поскольку JCz является константой, после подстановки Kc’g в теорему об относительном моменте движения, Введение угла поворота.
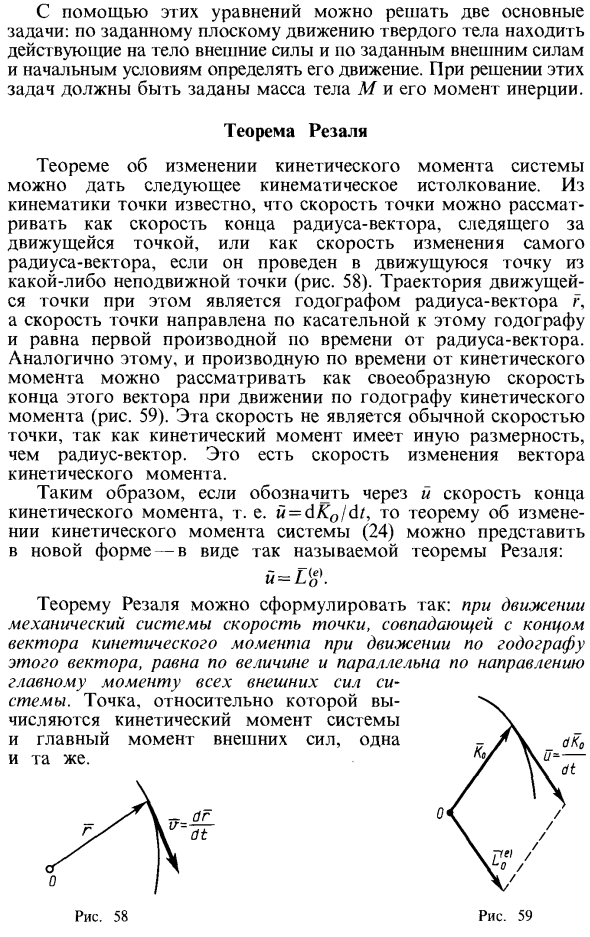
Эти уравнения могут быть использованы для решения Две основные задачи: нахождение внешних сил, действующих на тело, и конкретных внешних сил с заданной плоскостью движения твердого тела Сила и начальные условия определяют его движение. При решении этих задач необходимо дать вес М и момент его инерции. Теорема Резала: К теореме, касающейся изменения момента движения системы, можно дать следующую кинематическую интерпретацию. Из кинематики Для точек скорость точки может рассматриваться как скорость в конце вектора радиуса, следующего за движущейся точкой, или Когда скорость изменения самого радиус-вектора выводится из некоторой фиксированной точки в точку перемещения (фиг. 58).
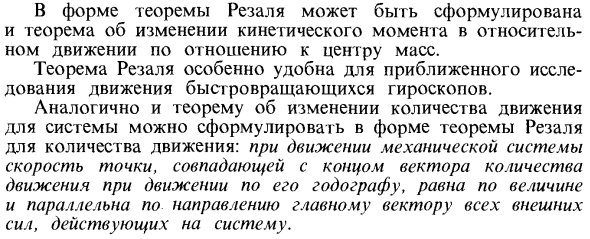
Траектория движущейся точки в этом случае является годографом радиуса-вектора r, а скорость точки направлена по касательной к ней. Равен первой производной по времени от годографа и вектора радиуса. Аналогично, производная по времени кинетической теории При движении по годографу момента угол момента можно рассматривать как внутреннюю скорость в конце этого вектора (рис. 59). Поскольку момент движения имеет другой размер, чем радиус-вектор, эта скорость не является нормальной скоростью точки. Это Скорость изменения вектора момента. Следовательно, если скорость конца движения представлена Для моментов, т. Е. U = dR0 / dt, теорема об изменении момента движения системы (24) может быть отображена в виде Вызывается теорема Резала.
Теорема Резала может быть сформулирована как: скорость точки, когда механическая система движется Рис. 59 Форма теоремы Резала, совпадающая с концом вектора кинетического момента при движении по годографу Теорема также сформулирована для изменения момента движения относительно центра тяжести. Теорема Лесала Это особенно полезно для высокоскоростных исследований приближения движения гироскопа. Аналогично теорема об изменении Импульс системы может быть сформулирован в виде теоремы Резала для импульса. Скорость точки, которая совпадает с конечной точкой вектора импульса при движении по системному годографу, равна Направление параллельно главному вектору всех внешних сил, действующих на систему.
Смотрите также:
Задачи по теоретической механике
