
Оглавление:

Связи и реакции связей
При решении большинства задач механики приходится иметь дело с телами несвободными, т. е. такими, которые соприкасаются или скреплены с другими телами, благодаря чему становятся невозможными те или иные перемещения данного тела.
Тела, ограничивающие свободу перемещения данного тела, называются наложенными на него связями.
Так. для тела, лежащего на столе, связью является стол; для вала, лежащего в подшипниках, связями являются подшипники; для лестницы, приставленной к стене, связями являются степа и пол.
Если под действием приложенных к нему сил тело будет давить на связь, то связь, в свою очередь, будет действовать па это тело.
Сила, с которой связь действует на тело, препятствуя его перемещению в том или ином направлении, называется реакцией этой связи.
По закону равенства действия и противодействия реакция связи равна по модулю силе давления на связь и направлена в сторону, противоположную этой силе, т. е. в сторону, противоположную тому направлению, по которому данная связь препятствует перемещаться телу.
Все действующие на тело силы можно разделить на активные силы и реакции связей. К активным силам относятся все силы, не являющиеся реакциями связей.
В отличие от активных сил, реакция связи зависит как от других, действующих на тело сил, так и от движения тела и характера наложенных на него связей. Она существует лишь тогда, когда тело, под действием приложенных к нему активных сил, оказывает давление на связь. Если нет действия на связь, то не будет и противодействия связи (реакции связи).
Модуль реакции связи всегда заранее неизвестен. Направление этой силы заранее известно в том случае, когда связь может препятствовать движению тела лишь к одном определенном направлении. В противных случаях направление реакции связи также заранее неизвестно и оно определяется только в результате решения данной задачи.
Задачи па равновесие несвободных тел решаются в статике на основании следующего очевидного принципа.
Аксиома связей (принцип освобождаемости). Всякое несвободное тело можно рассматривать как свободное, если мысленно освободить его от связей и заменить их действие на тело реакциями этик связей.
Пользуясь этим принципом, можно применять к несвободному телу условия равновесия, устанавливаемые и статике для свободного тела. Нужно только в число сил, действующих на тело, обязательно включать и реакции отброшенных связей.
Большинство задач статики как раз и заключается в определении реакций связей. Зная их, мы будем знать и силы давления па связи, т. е. будем иметь данные, необходимые для расчета на прочность соответствующих конструкций.
Рассмотрим, как определяется направление реакций некоторых основных типов связей.
Неподвижный цилиндрический шарнир или подшипник
Цилиндрическим шарниром называется соединенно Двух тел посредством пальца (болта), проходящего через отверстия в этих телах. Диаметр отверстия во втулке (рис. 7) несколько больше диаметра пальца.
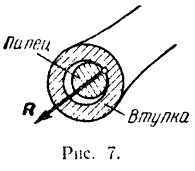
Тело, жестко скрепленное с втулкой, может только вращаться вокруг осп шарнира (оси пальца), перпендикулярной к плоскости рисунка.
Во многих случаях можно пренебречь трением в шарнире (между поверхностями пальца и втулки). В таком шарнире (называемом «идеальным») нет препятствий пи для поворота втулки вокруг оси пальца, ни для ее перемещения вдоль этой оси. Идеальный шарнир препятствует лишь перемещению втулки в направлении нормали к поверхностям втулки и пальца, и следовательно, его реакция  может быть направленной только по нормали (но радиусу пальца). Но так как втулка в зависимости от ее расположения и приложенных к ней сил может прижиматься к любой точке пальца, то указать заранее направление реакции цилиндрического шарнира нельзя. Единственно, что можно утверждать (если пренебречь трением в шарнире), это то, что реакция неподвижного цилиндрического шарнира лежит в плоскости, перпендикулярной к его оси, и имеет радиальное направление.
может быть направленной только по нормали (но радиусу пальца). Но так как втулка в зависимости от ее расположения и приложенных к ней сил может прижиматься к любой точке пальца, то указать заранее направление реакции цилиндрического шарнира нельзя. Единственно, что можно утверждать (если пренебречь трением в шарнире), это то, что реакция неподвижного цилиндрического шарнира лежит в плоскости, перпендикулярной к его оси, и имеет радиальное направление.
Для определения реакции связи в тех случаях, когда ее направление оказывается неопределенным, очень
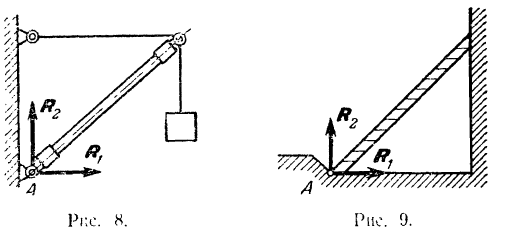
часто полезно заменить искомую реакцию нескольким!; составляющими, неизвестными уже только по модулю. Например, реакции шарнира  (рис. 8) или упора (рис. 9) удобно разложить на горизонтальную
(рис. 8) или упора (рис. 9) удобно разложить на горизонтальную  и вертикальную
и вертикальную  составляющие. В обоих случаях можно считать, что связь (шарнир или упор) препятствует перемещению тела как в горизонтальном, так и в вертикальном направлениях.
составляющие. В обоих случаях можно считать, что связь (шарнир или упор) препятствует перемещению тела как в горизонтальном, так и в вертикальном направлениях.
После того как будут найдены модули каждой из составляющих реакций, можно найти (при необходимости) и полную реакцию связи, как равнодействующую ее составляющих.
Заметим, что разлагая реакцию па составляющие, можно не заботиться о правильности выбора направлений по намеченным линиям их действия. Если в действительности та или иная составляющая окажется направленной в сторону, противоположную предположенном, то мы будем получать для нее в ответе отрицательное значение.
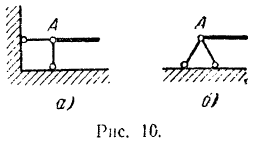
Неподвижный шарнир представляет собой так называемую шарнирно-неподвижную опору. Такая опора часто схематически изображается двумя стержнями (рис. 10, а и б), соединенными между собой на одном копне общим шарниром /1, ось которого, очевидно, будет неподвижной. Реакция такой опоры проходит через ось шарнира, но неизвестна как но модулю, так и по направлению и, следовательно, характеризуется двумя неизвестными элементами.
Определение модуля и направления реакции шарнирно-неподвижной опоры можно заменить определением модулей двух составляющих этой реакции. Наличие в схеме шарнирно-неподвижной опоры двух стержней как раз и указывает на неизвестность двух элементов реакции подобной связи.
Опора на катках
Мы говорили до сих пор о связях, осуществляемых абсолютно гладкими поверхностями. Эти связи препятствуют перемещению тел только в направлении, нормальном к поверхности, и характеризуются одной нормальной реакцией. Шероховатая поверхность не только препятствует перемещению, нарушающему связь, но и затрудняет перемещение по самой поверхности. Следовательно, реакция шероховатой поверхности имеет две составляющие: одну — нормальную к поверхности, и другую — лежащую в плоскости скольжения (в общей касательно плоскости к поверхности тела и опорной поверхности) и направленную в сторону, противоположную той, в которую двигают (или стремятся сдвинуть) тело приложенные к нему активные силы. Первая составляющая является нормальной реакцией, вторая носит название силы трения. Следовательно, шероховатые опорные поверхности отличаются тем, что для них находятся дополнительно учитывать силу трения.
О том, как это делается, мы будем говорить дальше, в главе VIIa сейчас отметим только, что хотя идеально гладких поверхностей, а следовательyо, и идеальных связей в действительности не существует, но во многих случаях величина силы трения может быть настолько малой, что можно пренебречь ею и практически считать связи идеальными.
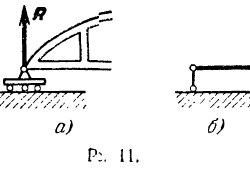
Примером такой связи является часто применяемая опора на атках (рис. 11, я). Подвижность катка настолько велика и, следовательно, сила трения настолько мала, что можно считать такую связь препятствующей лишь пересечению, перпендикулярному к опорной плоскости, почему она и характеризуется всегда лишь одной нормальной реакцией.
Опора а катках не препятствует перемещении оси шарнира параллельно опорной плоскости и представляет собой так называемую шарнирно-подвижную опору.
Такая пора часто схематически изображается одним стержнем, с шарнирами по копам (рис. 11,6). Реакция подобной опоры проходит через ось шарнира и направлена по нормали к опорной поверхности. Наличие в схеме опоры одного стержня указывает на неизвестность лишь одного элемента реакции шарнирно-подвижной опоры — се модуля.
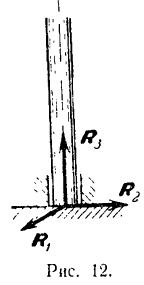
Подпятник
Подпятник (рис. 12) представляет собой соединение цилиндрического шарнира с опорной плоскостью. Такая связь позволяет вращаться валу (цилиндру) вокруг его оси и перемещаться вдоль ее, но только в одном направлении.
Реакция подпятника складывается из реакции цилиндрического подшипника, лежащей в плоскости, перпендикулярной к его оси (в общем случае она может быть разложена на составляющие и (рис. 12)), и нормальной реакции  опорной плоскости.
опорной плоскости.
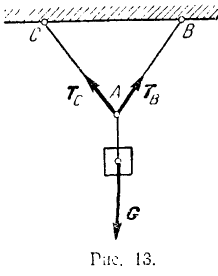
Гибкая связь
Пусть груз весом  подвешен в точке на нитях так, как показано на рис. 13.
подвешен в точке на нитях так, как показано на рис. 13.
Если считать нити нерастяжимыми, то они не дают точке удаляться от точки  но направлению нити
но направлению нити  и от точки
и от точки  по направлению нити
по направлению нити  . Следовательно, реакции
. Следовательно, реакции  и
и  нерастяжимых гибких нитей всегда направлены вдоль нитей к точке их подвеса.
нерастяжимых гибких нитей всегда направлены вдоль нитей к точке их подвеса.
Гибкой связью, очевидно, может служить не только нить, но и трос, цепь и др.
Невесомый стержень
Нити на рис. 13 могут быть без изменения направлений реакции заменены твердыми стержнями, если пренебречь их весом и считать стержни соединенными посредством идеальных шарниров.
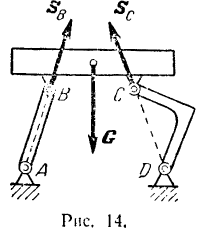
Вследствие отсутствия трения в идеальных шарнирах приложенные к концам стержней силы всегда окажутся направленными вдоль этих стержней. Эти силы могут только растягивать или сжимать стержни. В самом деле, как мы знаем, идеальный шарнир характеризуется только одной, нормальной к оси шарнира, реакцией. Но две силы, приложенные к стержню в его концах, могут уравновешиваться только тогда, когда они равны по модулю и направлены по одной прямой в противоположные стороны. Следовательно, реакция невесомого и шарнирно закрепленного стержни направлена вдоль линии, соединяющей центры шарниров.
Подобным же образом, очевидно, направлены и реакции  шарнирно закрепленных стержней, подпирающих тело (рис. 14).
шарнирно закрепленных стержней, подпирающих тело (рис. 14).
Реакции стержня можно практически считать направленными так и в случае, когда он закреплен наглухо (не шарнирно), если только вес стержня мал (сравнительно с действующими на него силами).
Эта теория взята с полного курса лекций на странице решения задач с подробными примерами по предмету теоретическая механика:
Теоретическая механика — задачи с решением и примерами
Возможно вам будут полезны эти дополнительные темы:
| Предмет и задачи статики. Понятие силы |
| Основные определения и аксиомы статики |
| Геометрический способ сложения сходящихся сил |
| Разложение силы на сходящиеся составляющие + пример решения |
