
Оглавление:


Свободные колебания системы с одной степенью свободы
- Машинная система называется системой 1 степени свободы, если она может однозначно определить свое положение в пространстве, задав одну величину q, называемую общими координатами. Движение системы в пространстве описывается временной зависимостью обобщенных координат. Принимая положение стабилизированного равновесия за точку отсчета обобщенных координат, рассмотрим малое движение системы вокруг этого положения равновесия при нулевом уровне потенциальной энергии. Отклонение системы от положения равновесия при выборе такой опорной точки определяется величиной обобщенных координат.
Если предположить, что дифференциальное уравнение малого дня составлено, а обобщенные координаты измеренные из положения равновесия и обобщенная скорость малы, то мы ограничиваемся дифференциальным уравнением движения линейным членом. Этот метод включает в себя отбрасывание члена нелинейного дифференциального уравнения, которое включает обобщенные координаты и скорости квадратов и более высоких степеней, и называется линеаризацией уравнения. Конечно, такая линеаризация в некоторой степени искажает действительный образ движения, но чем меньше отклонение системы от устойчивого положения равновесия, тем точнее линеаризованное уравнение описывает движение системы.
Сила, приложенная к материальной точке, называется центральной, если линия ее действия проходит во время движения через ненодвижную точку, называемую центром. Людмила Фирмаль
Линеаризация дифференциальных уравнений позволяет получить замкнутые решения систем таким образом, что правильно найти Интеграл. В конечной форме нелинейной системы уравнений это, в принципе, невозможно Удобным способом создания дифференциального уравнения малой вибрации системы является использование уравнения Лагранжа. Форма этих уравнений для 1 степени свободы имеет вид Где t-кинетическая энергия системы, представленная обобщенными координатами q и обобщенной скоростью b. Q-обобщенная сила.
Кинетическая энергия системы, на которую воздействует стационарная связь, выражается обобщенными координатами и скоростями по следующей формуле 2 Где a q — положительная функция обобщенных координат q. Затем разверните a h ряда Маклорина, чтобы линеаризовать представление кинетической энергии a 9 a 0 d 0 c 9.
Если ввести это значение в Формулу 2, то оно будет выглядеть так Г 4л 0 Тогда, предполагая, что q и q находятся в небольшом количестве, примерно Т р 0 и b г и Q, 5 4 Для простоты константа A 0 обозначается через a .Эта константа всегда положительна .Это называется коэффициентом инерции .Для линейных общих координат коэффициент инерции а имеет размерность массы, а для угловых координат-размерность момента инерции твердого тела .Позиционная энергия системы является обобщенной функцией P P 7 .6 Серия маклорин возле здания конюшни Разложите это функциональное равновесие П U 0 — J-P 0 9 — 4 P 0 В этом выражении.
Это происходит потому, что положение равновесия выбирается относительно нулевого уровня потенциала .Энергия .Потому что обобщенная сила в положении равновесия также равна нулю 9 Итак, серия 7 начинается с пункта 3. Если вы отбросите термины более высокого порядка и используете 0 c для выражения краткости, вы получите Н, J В значения i0- Здесь константа c называется коэффициентом квазиапратичности .Для устойчивого равновесия, c 0 .By вводя кинетическую энергию 5 и потенциальную 10 энергию в уравнение Лагранжа 1, получаем дифференциальное уравнение малой свободной вибрации системы с 1 степенью свободы.
Это уравнение имеет структуру, аналогичную дифференциальному уравнению свободного колебания точки массы, которое возникает под действием линейной восстанавливающей силы .Форма общего интеграла уравнения 11 имеет вид Грех 12 Для краткости указывается — .Нью-Йорк, I-начальная фаза, -я-а-Bapii фазы .Где находится Вибрация, k-частота трека Амплитуда и начальная фаза колебаний определяются начальными условиями .указывает начальное значение обобщенных координат относительно производной 1 0 по q q, .Цикл вибрации 13 14 Бесплатно, или иным образом принадлежит Она представлена формулой 12 Вибрация системы, определяемая гармоническими колебаниями .Их Период не замерзает Исходные данные от объекта недвижимости Она называется изохронной малых колебаний.
Дифференциальное уравнение свободной вибрации 11 является более точным уравнение Лагранжа .Л При решении задачи рекомендуется использовать свободные столбцы в системе 1 .1 Выберите обобщенные координаты q 2 кинетическая энергия t 3 найти потенциальную энергию P только если система консервативна или вычислить обобщенное значение 4 подставляя Г И И или обобщенное выражение силы в уравнение Лагранжа, получаем малое дифференциальное уравнение коребапии .5 Когда вы интегрируете это уравнение и определите любую интегральную постоянную, вы найдете уравнение движения системы .Определить период колебаний и другие желаемые величины .Второй способ заключается в применении одного из основных уравнений динамики или 1 общей теоремы динамики 1 уравнения, основанные на задачных условиях уравнения-основанные на движении центра.
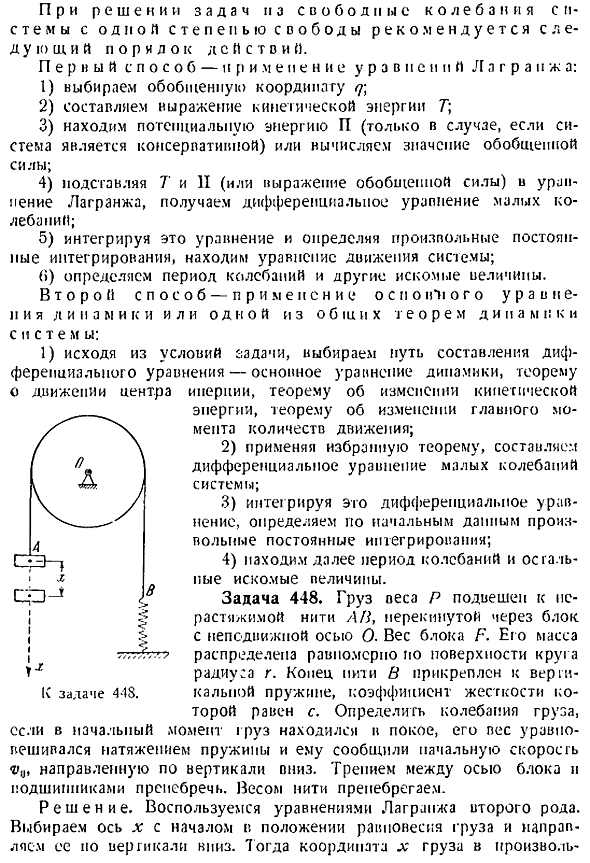
Выберите, как создать Хи, дифференциальные уравнения динамики, теорему инерции, теорему об изменении кинетической энергии, теорему об изменении основного момента импульса .2 применить выбранную теорему для создания дифференциального уравнения малой вибрации Разделив это дифференциальное уравнение, определим из исходных данных 4 Найти далее необходимое количество колебательного цикла и покоя .Задача 448 .Подвешен груз весом P от NS вытягивающих нитей, переброшенных через блок фиксированной осью O .
Его масса равномерно распределена по поверхности круга с радиусом D .концы резьбы B прикреплены к вертикальной пружине с равной жесткостью factor .To определите изменение нагрузки, груз неподвижен, его собака уравновешивается натяжением пружины, и ему сообщают о нисходящей начальной скорости .Трение между осью блока и подшипником игнорируется .Вес нити игнорируется .Решение .Используйте 2-й вид уравнения Лагранжа .Выберите ось x, чтобы начать с положения равновесия груза и направить его вертикально вниз .Тогда координаты груза x.
- Этот момент прекрасно определяет местоположение системы и может считаться обобщенными координатами. Кинетическая энергия системы — это сумма кинетической энергии нагрузки и кинетической энергии блока .Скорость 2 Это мне напоминает .Скорость загрузки В результате конечное выражение кинетической энергии стенки обобщенной скоростью принимает вид 3 Чтобы определить обобщенную силу, приведите систему к возможному не-РС смещению и составьте основную работу данной силы .Основная работа заключается в работе силы тяжести груза и силы упругости пружин..
Если положение равновесия cD-P буква A указывает на статическое удлинение пружины .Обобщенная сила-это Коэффициент смещения 8x, возможный в Формуле начального образования .си Добро пожаловать на наш сайт Заметим, что в этой задаче обобщенная сила Q может быть легко вычислена другим способом .Выберите положение равновесия нагрузки P на нулевом уровне, чтобы создать выражение для потенциальной энергии системы .Обобщение Создание Лагранжа equation.
Таким образом, прямая задача динамики материальной точки легко решается посредством дифференцирования заданных уравнений движения точки. Людмила Фирмаль
Решение этого однородного линейного дифференциального уравнения с постоянным коэффициентом принимает вид х грех 9 Где частота k находится из уравнения Б а П 0. 5 Ф Любая константа, интегрирующая начальные условия Далее, из 9 Подставляя эти значения в 9, можно увидеть следующее Это значение является необязательным. Период свободной вибрации груза У 3 будет определяться из И 12 13 14 9, получить 15 16 Задача 449. Резьба ab удерживает вес q и радиус r полусфер в равновесии на идеально гладкой горизонтальной плоскости surface. In в этом случае плоская часть поверхности полусферы образует горизонт и угол х рисунок а.
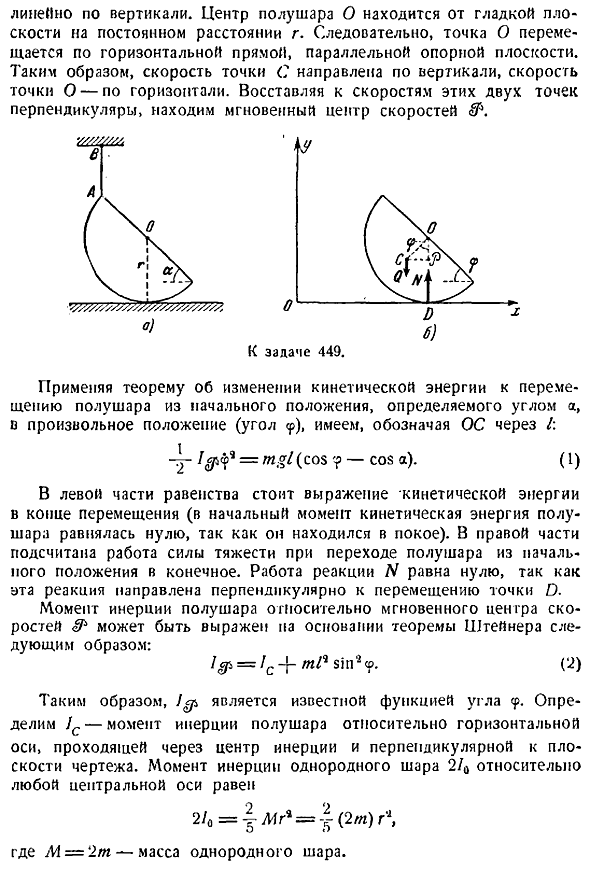
Определить скорость центра О и его максимальное значение, максимальное полусферическое давление в горизонтальной плоскости после избиения АВ thread. It также устанавливает угол, чтобы быть меньше и сокращает длину эквивалентного математического маятника. Решение. После обрыва нити рис. Б, на полусферу действует реакция 2 сил, веса q и гладкой плоскости n. Обе силы направлены вертикально. Согласно теореме о движении центра инерции, ускорение центроида С также направлено вертикально.
Начальная скорость точки С и других точек нолушара равна нулю, поэтому центр инерции движется непосредственно Прямо и вертикально. Поскольку центр полусферы o находится на некотором расстоянии r от гладкой плоскости, точка o движется вдоль горизонтальной линии, параллельной плоскости отсчета. Таким образом, скорость точки с направлена вертикально, а скорость точки о направлена горизонтально. Восстановив перпендикуляр к скорости этих 2 точек, найдем мгновенный центр скорости. В один Шесть Применяя теорему об изменении кинетической энергии к смещению полусферы из исходного положения, определяемого углом, в искомое положение угол p, можно обозначить ОС через g. — m 1 c 8 — ля.
В левой части уравнения находится выражение кинетической энергии в конце движения в первый момент кинетическая энергия полушария была равна нулю, так как он был неподвижен. Справа вычисляется работа силы тяжести при переходе полусферы из начального положения в конечное. Эта реакция направлена перпендикулярно движению точки d, поэтому работа реакции n равна нулю. Момент инерции полусферы относительно центра мгновенной скорости может быть выражен следующим образом на основе теоремы Штейнера 2 Таким образом, 1av является известной функцией угла f. Определение l-момент инерции полусферы относительно горизонтальной оси, которая проходит через центр инерции и перпендикулярна плоскости чертежа.
Однородный шар относительно любой центральной оси имеет момент инерции 2 0. — — Афр Где m 2 m-масса однородной сферы. Тогда равномерный момент инерции норшера относительно горизонтальной оси, перпендикулярной плоскости чертежа и проходящей через точку О, выглядит следующим образом Расстояние от того, что использовало теорему Штайнера до центра инерции Нолушара, равно равно g.
Лаконичность х гптра нолушара Скорость создать diffsrep С другой стороны Дериват ypauheiiiiii Найти формулу 2 и Расчет квадратичных производных 5 Использование После простого преобразования, введя значения 1-й и 2-й производных угла в уравнение 10 и подставив p-значение 8, находим следующее Далее, учитывая равенства 3 и 4, наконец — -. — — Ы 1 — — потому что — 2cos коза. Ч Максимальное давление полусферы на плоскость составит е 0 12 дифференциальное уравнение для колебаний полусферы имеет вид 1 разница во времени — ш СЛН 13 тр грех Р С cos Ф — МГЛ грех. 14 Чтобы перейти от движения, вычислите Я его нарисовал.
Новеядка Малая комплексная Точность уравнений От малого уравнения к первой величине Укорочение длины СФ- — mglf 0. 15 Прекрасный математический маятник 16 Уравнения Лагранжа были использованы для передачи на 2-м теле малой вибрации дифференциального уравнения редактирования. Выберите угол где p-обобщенные координаты системы. Кинетическая энергия системы может быть выражена формулой Т — f В С tr sln4 17 Чтобы составить уравнение Лагранжа, вычислите его Обобщенные координаты g.
Производная кинетической энергии og ntcost. 20 Как найти общее месиво и рассчитать работу Сила дает системе все возможные силы для этого движения qzrf мгал потому что в 4-пятидесяти — с cos р с-МГЛ греха на 8 р. 21 Поскольку это 8 p, sin cos 5 p1 принимается. Депозит. Значение уравнения Лагранжа ДТ йй йй q 22 Мы это выясним 23 с МФ грех п п т ф грех Р соз Ф — МГЛ грех п Это соответствует ранее выведенной формуле 14 по-другому. Первый способ решения этой задачи ведет к цели несколько быстрее, но правильный выбор общей теоремы динамики во многом зависит от содержания задачи и требует определенного навыка.
Смотрите также:
Предмет теоретическая механика
