
Оглавление:


Свободные колебания системы с двумя степенями свободы
- Рассмотрим малую вибрацию механической системы с 2 степенями свободы, подчиненную голономной идеальной связи и квазисвязи. Qb dg обозначает обобщенные координаты, определяющие положение системы в пространстве. Кинетическая энергия такой системы становится однородной формой обобщенной скорости 2-го порядка. г-г а я 2л л е. 1 В этой формуле коэффициенты Au, Aa, Lm являются функциями обобщенных координат. Положение устойчивого равновесия, при котором небольшие движения системы происходят вблизи, считается началом обобщенного coordinates. В положении равновесия все обобщенные координаты будут равны нулю. Разложим каждый коэффициент ряда Маклорина по степени обобщенных координат n.
Обобщенные координаты и скорости считаются малыми величинами, поэтому они ограничены первым членом разложения и для простоты указывают постоянные коэффициенты L 0 a , 3 Найти конечное выражение кинетической энергии системы 7 y и значения vc, vc, называются коэффициентами инерции. Если система движется в пределах потенциального силового поля, потенциальная энергия системы передается в ряд Маклорина n И. — Н 0 г, 1 г, т ю 2 О. 5 Поскольку выбор точки отсчета потенциальной энергии произволен, поместите потенциальную энергию системы в сбалансированное положение, равное нулю. П 0 0. 6 В положении равновесия все обобщенные силы исчезают.
В некоторых задачах динамики материальной точки и системы материальных точек можно значительно упростить решение путем применения так называемых общих теорем динамики. Людмила Фирмаль
Так, в разложении 5 терм с обобщенными координатами 1-го порядка исчезает. При этом потенциальная энергия системы совершает небольшое движение вблизи положения устойчивого равновесия и приобретает равномерную квадратичную обобщенную форму. Координаты —y КР сЧЧЧММ КР 8 Здесь для краткости показаны постоянные коэффициенты Коэффициенты Cs, Hz называются квазичастицами. Полученные значения кинетической энергии и потенциальной энергии вводятся в уравнение Лагранжа..
Найти дифференциальное уравнение движения системы. АУ Я в AI2 с — — Ку I firf 0, 1 КР АИС, С12 КР. Найти конкретное решение уравнения I в виде х Ssln Ш а, г Дсин а а, 12е Где B, D, a неизвестны constants. To определяя их, значение обобщенных координат 12 вводят в систему систем уравнений 11, сводя их с общим коэффициентом sin Af-f-a .И затем… 5 с -й ии D CLT-K alt О 5 Си-л Аа1 П s1b-а с 0. 13 Эта система линейных однородных алгебраических уравнений всегда имеет тривиальное решение B D 0, которое соответствует равновесию системы. Система уравнений 13 может иметь и другие ненулевые решения, если определитель системы равен нулю.
Из уравнения 13 следует отношение амплитуды СС—baats о — КГА, 1 Д СС- ААЦ-СС — АИ Определитель 14 представляет собой отношение между амплитудами, найденными независимо от 1-го и 2-го уравнений 13. таким образом, если условие 16 выполнено, то уравнение 13 имеет вид По ним можно определить только отношение амплитуд. Открыв определитель 14 или ia 15, мы находим частотное уравнение, или то, что называется вековым уравнением. птам-а 9 к — aishi а СС-2s1aa12 а УОНИ-ы, 0.
Поскольку исследуемое движение мало, то если корни этого уравнения положительны, то равновесие устойчиво. A 0, A 0. 17 если k или Aj отрицательны или сложны, то решение 12 содержит гиперболическую функцию, и движение вокруг положения равновесия не уменьшается. Если неравенство выполнено, то корни A и AJ будут положительными. Ря Оса афазия- и o СС 0, СС 0,ССС-С, 0. 1 5 Возможны 2 особых случая. Первый случай В этом случае гармоническая вибрация одинаковой частоты соответствует обеим координатам. 2-й случай Oufia — 0. 21 В этом случае 1 из корней частотного уравнения исчезает. После нахождения корней частотных уравнений Aj и Aj определяется основная вибрация системы.
Первые большие качели. Задается уравнением i BiSln A1f a1, 91 D1sln A1 ai , 22 И 2-я основная вибрация обусловлена формулой Ф BjSlnfAjf дя, я Д, грех А4 дя. 23. Общее решение-это сумма данного решения, обусловленная линейностью уравнения. Версии 9i ВХ грех кДж Здж В4 грех кДж СС, 24 9 С O1sln A1f А1 L1sIn АА тх1. 25 Если вы присвоите значение амплитуды kx 15 Р1 СИ- А1а. ФЛ 67 СК-футов корпусе типа 0u. И затем… А КВ есть я ПА грех КРТ В1 ПА грех СС, 27 -мы не сможем этого сделать, — сказал он. 28 Тогда любая интегральная константа Dlt DT, ai, a2 определяется начальными условиями выполнения упражнения.
Наряду с уравнением Лагранжа можно применить теорему общей динамики для формулировки дифференциального уравнения для малых колебаний в системе с 2 степенями свободы. При решении задач с изучением малых колебаний консервативной системы с 2 степенями свободы рекомендуется следующая последовательность действий Первый метод заключается в использовании уравнения Лагранжа. 1 Выберите обобщенные координаты Два 2 Создайте выражение кинетической энергии t 3 определить потенциальную энергию системы Р или рассчитать обобщенную силу. 4 получить систему из 2 дифференциальных уравнений малых колебаний путем введения уравнений и или обобщенных сил в уравнение Лагранжа.
- Поиск конкретного решения для этой системы, подставляя конкретное решение для системы дифференциальных уравнений движения. 6 Убрав амплитуду колебаний из полученной системы алгебраических уравнений, вы найдете уравнение частоты. 7 после решения уравнения частоты определите собственную частоту системы. 8 вводя найденные частоты в конкретное решение, получаем формулу, описывающую 2 основных колебания. 9 добавьте уравнение основной вибрации для каждой обобщенной координаты, и вы найдете общее решение. 10 из начальных условий движения определить 4 произвольные константы.
Второй метод — это использование теоремы общей динамики. 1 Выбрать метод составления дифференциальных уравнений, исходя из условий задачи-либо основных уравнений динамики, либо общей теоремы динамики. 2 примените выбранную теорему для создания дифференциального уравнения малой вибрации для системы. 3 после получения конкретного решения системы эти конкретные решения вводятся в систему дифференциальных уравнений. 4 после решения полученной системы уравнений найдите частотное уравнение для определения собственной частоты системы. 5 если ввести найденные частоты в конкретное решение, то получится уравнение основной вибрации.
При этом следует иметь в виду, что внешние и внутренние силы могут зависеть как от времени, так и от положений, скоростей и ускорений точек системы. Людмила Фирмаль
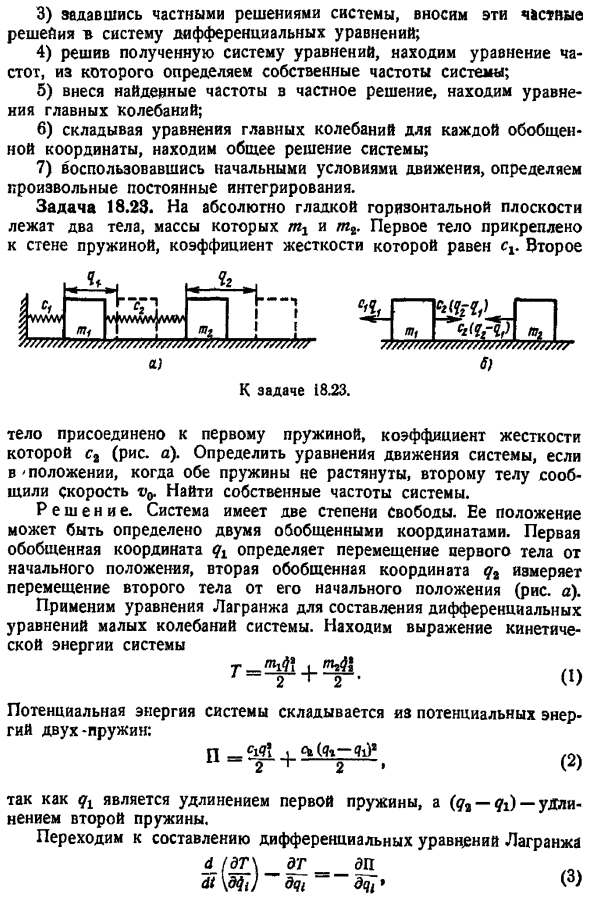
Суммируя уравнения главных колебаний каждой обобщенной координаты, находим общее решение системы. 7 определить любую интегральную постоянную, используя начальные условия движения. Задание 18.23.На абсолютно гладкой горизонтальной поверхности находятся 2 объекта, масса которых равна u и n. первый корпус прикреплен к стене пружиной, а его коэффициент жесткости равен cv а с По вопросу 18.23. Корпус крепится к первой пружине, коэффициент ее жесткости равен ct рисунок а. В положении, определить уравнение движения системы, если 2-й орган уведомляется о скорости Vf, когда обе пружины не растягиваются. Найдите собственную частоту системы. Решение. Система имеет 2 степени свободы.
Его местоположение можно определить по 2 обобщенным координатам. Первые обобщенные координаты определяют смещение первого объекта из первой позиции, а вторая обобщенная координата измер2 измеряет смещение второго объекта из первой позиции рисунок а. Примените уравнение Лагранжа, чтобы создать небольшое дифференциальное уравнение вибрации для системы. Найти выражение кинетической энергии системы Р-. 1 2 потенциальная энергия пружинного жабра Система состоит из потенциальной энергии Р С14. 41-41 2 2н2 2 потому что ft является продолжением первой пружины, а ft —ft является продолжением второй пружины.
Продолжайте составлять дифференциальные уравнения Лагранжа д дл ГЛ-ООН л ш — dqt DQL по Поскольку система имеет 2 степени свободы, 1, 2.С — Футовый 4 Тогда первое дифференциальное уравнение движения системы имеет вид Мл C191 Ки фунто-футов. Ы Мб г МЮ 1 5 6 Тогда двумерное дифференциальное уравнение движения можно описать как М — т фут -.фут. — 7 Таким образом, мы получаем систему из 2 дифференциальных уравнений 5 и 7 движения. Чтобы найти общий Интеграл этой системы линейных однородных дифференциальных уравнений с постоянными коэффициентами, найдите конкретное решение в виде фут B грех т а, м Дсин а а. 8 Для этого введем значения 7 в формулы b и 8.
Уменьшив общий коэффициент sln W a Б-вст КТ Д-Б 0.1 ДК Т-КТ Д-В 0. 9 Эти 2 уравнения, 3 неизвестных, Б, D, и K. Из этих, коэффициент амплитуды определяется. Из первого уравнения мы узнаем Из 2-го уравнения В С 0 м с,-м Б-С Д-с У П Выровняйте правую часть последних 2 уравнений, и вы найдете уравнение. Где получено отношение частот сі с — OTife ы з, ы, — МДж 12 Из этого бикубического уравнения определяется собственная частота системы Г 4 O, 26 i i —г.. 14 Таким образом, есть 2 реальные частоты и kt. Учитывая линейность одновременных уравнений 5 и 7, общий Интеграл можно найти как сумму 2 частных решений 8, обусловленных частотой, амплитудой и начальной фазой.
Здесь модель QX грех к 4 ч, qт Ди греха кДж топор Объясняет первую крупную вибрацию системы 91-б, грех кДж а, ц ДФ грех кДж в — 2-й главный качели. Отношение амплитуд первого основного колебания, с другой стороны, определяется из 10 подстановкой fe Ax. 15 16 17 −5 54 1 — 18 Аналогично, мы получаем примерно 2-ю основную вибрацию о 9 Здесь вводится обозначение p1 p2 для brevity. So, общее решение 15 принимает вид ч Пксл х Sin кДж Х PjD2 грех кДж в, 1 92 D1sin А1 D1sin дя. Дж Любые константы Di, Dt, alt a2 определяются начальными условиями движения.
В зависимости от условия задачи при T 0 71 0 0 71 0 00 21 Вводя эти значения переменных в уравнение 20 P1D1 грех ИИ рао2 греха АА 0, грех ctj да грех АА 0 потому что а PiDj я, потому что а 0,со Dtkt косинус в ва, дж Здесь определяются все произвольные интегральные константы ai aa 0, то есть начальная фаза обоих главных колебаний равна нулю, а амплитуда главных колебаний равна N на е N РО 1 1 — Р1 Р1-Р. Согласно 20, движение системы представляет собой суперпозицию 2 гармонических колебаний различной частоты. Для составления дифференциальных уравнений движения, можно применить другой метод, используя установленные законы динамики.
Рассмотрим произвольное расположение системы, определяемое обобщенными координатами qlt qt рисунок B. Затем мы используем уравнение динамики массы и, учитывая упругую силу пружины, создаем дифференциальное уравнение для движения каждой нагрузки. Я Я вв в интернет -фифт М 1 — cllql-К1- 24 Эти уравнения совпадают с уравнениями 5 и 7, полученными с использованием уравнения Лагранжа.
Смотрите также:
Предмет теоретическая механика
