
Оглавление:


Свободные колебания системы с двумя степенями свободы
- Рассмотрим малую вибрацию механической системы с 2 степенями свободы, которая подчинена голономным, идеальным и фиксированным комбинациям. Указывает на определение обобщенных координат положение системы в пространстве через qt, q кинетическая энергия такой системы будет находиться в равномерной форме 2-го порядка обобщенной скорости. Это функция. Во 2-м уравнении коэффициенты aj, aj, обобщенные координаты.
Положение устойчивого равновесия, в котором небольшие движения системы происходят вблизи, считается началом координат обобщения. Таким образом, в положении равновесия, все обобщения Координаты равны пулю. Расширяет каждый коэффициент ряда Маклореана со степенью обобщенных координат. Координаты и скорости считаются малыми величинами, поэтому ограничьте их первым членом разложения. Для простоты, постоянный коэффициент Быть обобщенным и средним 3 Найдите последнее выражение Кинетическая энергия системы б ам. 4 Величина ai, a 1, an называется коэффициентом инерции.
Предположим, что груз из положения статического равновесия перемещается п положительном направлении оси х, г. Людмила Фирмаль
- Если система движется через потенциальное силовое поле, потенциальная энергия системы может быть увеличена путем возведения в степень. Обобщенные координаты ряда Маклорина 91. Начиная с первого выбора, установите потенциал на ноль. Точка отсчета потенциальной энергии произвольна, и энергия системы в этом положении равна p 0. В положении равновесия все обобщенные силы исчезают. Следовательно, в разложении 5 терм с обобщенными координатами 1-го порядка исчезает. Далее следует позиционная энергия системы, которая совершает небольшие движения вблизи позиции. Устойчивое равновесие становится однородной квадратичной формой обобщенных координат.
Здесь для краткости показаны постоянные коэффициенты — О. — 9 Коэффициенты cc, cc, cm называются квазиплексическими коэффициентами, а значения полученных кинетической и потенциальной энергий Найти дифференциальное уравнение движения системы. Д Я я an5i СП И-Л-КН 0, — ф-фот 2 0 а А14, СК С5. Найти конкретное решение уравнения i в виде 7, Б греха Ат — -, qт Д грех а — — а, 12 Где b, d и неизвестны constants. To определить их, получить значение 11 обобщенных координат системы уравнений 12 и свести их с общим коэффициентом sin kt- -я. И затем.
Мы получаем Б с -кого Д уп4 —а А14 0 Б с — Клав — — я Си-ам 0 .13 Эта система линейных однородных алгебраических уравнений всегда имеет тривиальное решение B Z O, которое соответствует равновесию системы .Система уравнений 13 включает в себя другие Ненулевое решение, когда системный определитель равен пуле 14 15 Определитель 14 представляет. Уравнение относительно амплитуды определяется независимо от первого и второго уравнений 13 .Итак, если условие 13 выполнено, то уравнение 13.
Это зависит, и только по ним можно определить отношение амплитуд .Откройте определитель 14 или 15 из уравнения частоты, или также называемого вековым уравнением Ана -АИС в — OpSmN-OyatSts-2С 40ц а ССС 4-с 0 .16 Исследуемое движение невелико, поэтому, если Корин в этом уравнении положителен, то равновесие устойчиво .Ф-Сли А И движение и А4 я 0 .А 0 .
Решение 12 содержит гиперболическую функцию вблизи положения равновесия .Корень Если вы хотите удовлетворить неравенство н 0 СП 0 Ай 0 чи 0 е ОИ-ч 0 .Гармонические колебания соответствуют обеим координатам Первый случай Л 20 Второй случай В этом случае 1 из корней частотного уравнения будет пули .После нахождения корней частотного уравнения A и kt .Определена основная вибрация системы .Первый Колебания описываются следующими уравнениями 9и ФЛ, грех кът а, 4и И второе большое колебание-это формула .
9, Д sin i4i — — a, , g, Общее решение уравнения первого решения по линейности Заменить амплитуду Давать определение Произвольная интегральная константа Di, D i, начальное условие d Наряду с уравнением Лагранжа, b X-уравнение малого осциллятора Г, Б, грех А, А 4-дут грех КТ дя, Ки Д, грех — я, Ди греха комплект- -яд .Дифференциал 1 Выберите обобщенные координаты q и q .2 выражение кинетической энергии 7 3 определить потенциальную энергию системы Р или рассчитать обобщенную силу .4 вводя формулы T и I или обобщенные силы в уравнение Лагранжа, получаем систему из 2 дифференциальных уравнений малых колебаний.
- Найти конкретное решение для этой системы и назначить конкретное решение для системы дифференциальных уравнений движения. Если исключить амплитуду колебаний из полученной системы алгебраических уравнений, то получится уравнение частоты .7 решите частотное уравнение и определите собственную частоту системы .8 вводя найденные частоты в конкретное решение, получаем формулу, описывающую 2 основных колебания .9 добавьте уравнение основной вибрации для каждой обобщенной координаты, и вы найдете общее решение .10 из начальных условий движения определить 4 произвольные константы.
Выбрать метод составления дифференциальных уравнений, основанный на условиях задачи-основных уравнениях динамики или 2 примените выбранную теорему для создания дифференциального уравнения малой вибрации для системы .3 найти конкретное решение системы и ввести эти конкретные решения в систему дифференциальных уравнений .4 решите полученные одновременные уравнения, и вы найдете частотное уравнение для определения собственной частоты системы .5 если ввести найденные частоты в конкретное решение, то получится уравнение основной вибрации.
Движение материальной точки под действием центральной силы происходит в плоскости, проходящей через вектор радиус и началь-ную скорость точки. Людмила Фирмаль
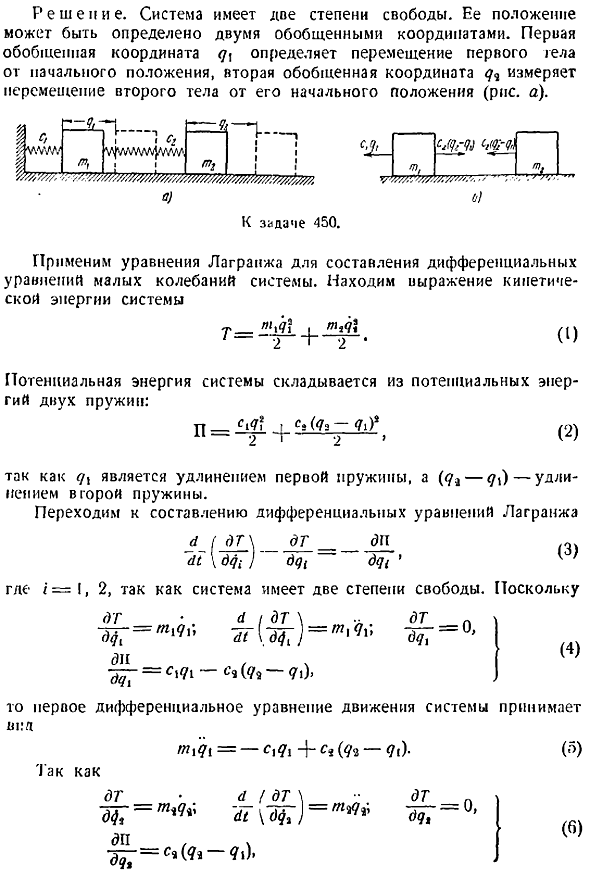
Суммируя уравнения главных колебаний каждой обобщенной координаты, находим общее решение системы .7 определить любую интегральную постоянную, используя начальные условия движения .Проблема 450 .На абсолютно гладкой горизонтальной поверхности находятся 2 объекта, масса которых равна m и mt .Первый корпус крепится к стене с помощью пружин, где коэффициент жесткости равен .Второй корпус крепится к первой пружине, коэффициент жесткости которой равен с рисунок а .Определите уравнение движения системы, если обе пружины расположены не растянутыми .2-му телу сказали скорость Т о .найдите собственную частоту системы .Решение .Система имеет 2 степени свободы.
Его местоположение можно определить по 2 обобщенным координатам .Первая обобщенная координата qt определяет смещение первой от Начальное положение, 2-я обобщенная координата, измеряет перемещение 2-го объекта из исходного положения рисунок а .К выпуску 450 .Примените уравнение Лагранжа, чтобы создать небольшое дифференциальное уравнение вибрации для системы .Найти выражение каипетической энергии системы Д Потенциальная энергия системы состоит из 2 пружинных гиллиумов .Возможность Энергия 2 qt-это расширение первой пружины и потому что, — qt — это 2-е весеннее расширение .Приступим к составлению дифференциальных уравнений Лагранжа Д Ф ДГ ДТ ДП ДТ я dqt dqt dqt 3 Здесь, поскольку система имеет 2 степени свободы, i I, 2 .С 4 Первое дифференциальное уравнение движения Тогда двумерное дифференциальное уравнение движения можно описать как .
Таким образом, получаем 2 дифференциальных уравнения движения о и 7 .Найти общие интегралы однородных дифференциальных уравнений Найдите конкретное решение в виде Это линейная система констант д B грех в-я ГТ г грехе В а .Для этого введем значения 5 и 7 в формулу 8 .Уменьшая общий коэффициент sin Af-t-a, можно увидеть следующее RA M, sun 0-B 0, 1 OLX-c4 0-B 0 .9 Эти 2 уравнения имеют 3 неизвестных B, O и A .из них определяется отношение амплитуды .Из первого уравнения Из 2-го уравнения С .- л .— р .10 Ч Если мы приравняем правую часть последних 2-х равенств 12 1 .1 .
Собственная частота определяется из этого квадратичного уравнения .мой м .Н Ай г я Частота A и Aj-u 7, общий Интеграл решения 8 Так что есть 2 реальных Линейность одновременных уравнений 5 может быть найдена как сумма 2 частных .Частота, амплитуда, начальная фаза м, р, грех А, Т-Я-А, Р .грех айт и AJ, 1 7, D, то грех как я, — я-Ви грех Т — — А4, Дж — 2-й главный качели .С другой стороны, отношение амплитуды первой основной ванны равно 10 подстановке ft A4 .1 в, грех, — -а 4 О грех, — — Ад .Объясняет первую крупную вибрацию системы 1 Б, грех кДж а .4 ДТ грех кДж 2-й год 20 Краткость изложения record .
Если вы введете эти значения переменной в уравнение 20, то увидите следующее П12 греха яд РСП грех А5 0, ДТ греха яд О4 Синн 4 0, потому что ЭК — — p4o4l4 потому что а, 0, Д, К потому что А З 4 4 потому что А4 В4, Дж 21 Где определяются все произвольные интегральные константы xi at 0, то есть начальная фаза обоих главных колебаний равна нулю, а амплитуда главных колебаний имеет вид 0 Движение системы 20 является наложением Гармоническая вибрация АМ частота. Для создания дифференциальных уравнений движения мы применяем другой метод, используя основные законы Ди. Рассмотрим любую позицию в системе, определяемую ценной координатой qb qt рис. 6.
Затем сообщите нам пружину и создайте дифференциальное уравнение для нагрузки. Я с, qт-ци — с, qlt-КТ qт-q, а. Эти уравнения идентичны уравнениям 5 и 7, полученным с использованием уравнения Лагранжа. Применяя Основной закон динамики к этой задаче, вы можете редактировать дифференциальное уравнение движения быстрее и проще, но первый способ-использовать уравнение Лагранжа.
Смотрите также:
Предмет теоретическая механика
