
Оглавление:



Свободные колебания системы с двумя или несколькими степенями свободы
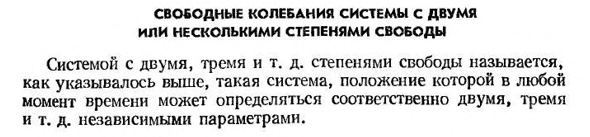
- Две системы свободной вибрации Или какая-то степень свободы Две или три такие системы. Степень свободы, как уже говорилось выше, называется такой системой, в любой момент ее расположение можно определить по двум, трем и т. Каждый независимый параметр. 551 типичные вибрационные системы такого рода часто встречаются в машиностроении, валы с несколькими дисками (рис. 532), совершая крутильные колебания, балка с некоторой сосредоточенной
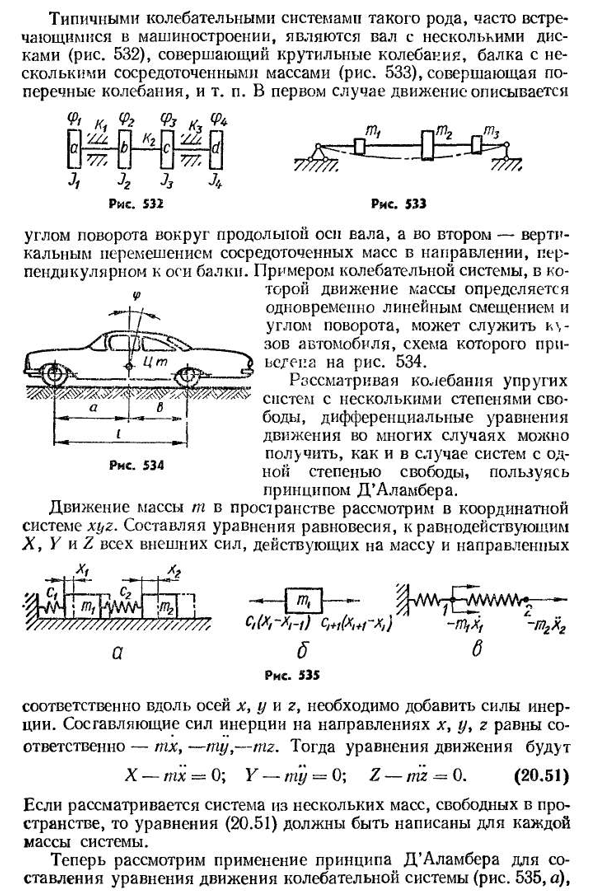
массой(рис. 533), делают боковую вибрацию, etc. В первом случае описывается движение Рис пятьсот тридцать два Рис пятьсот тридцать четыре < URL-адрес Продольное направление вала определяется углом поворота вокруг оси, а во-вторых-вертикальным движением массы, сосредоточенной в направлении, перпендикулярном оси балки. Например, если вы определяете движение массы как в линейном перемещении,
так и в угле поворота, на рисунке показана колебательная система, которая может Людмила Фирмаль
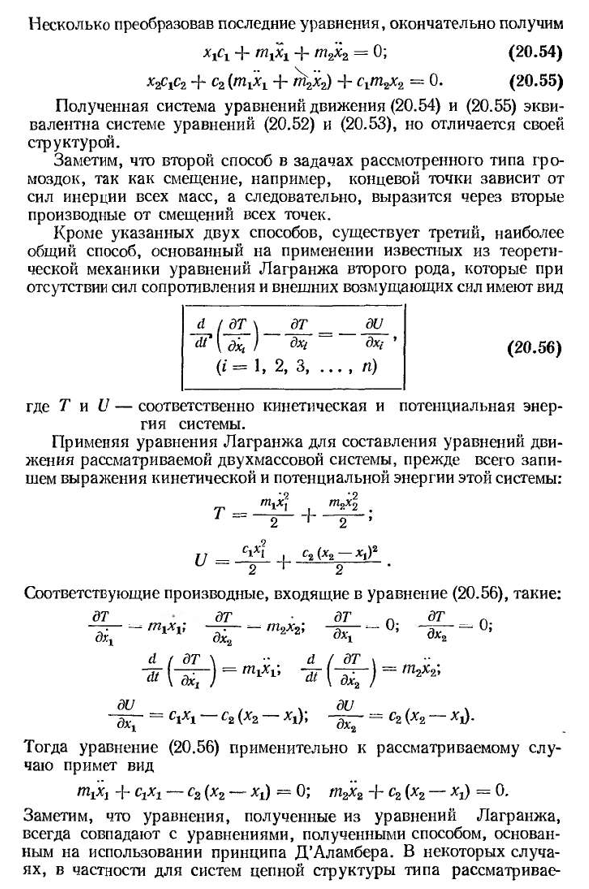
функционировать как схема кузова автомобиля. Пятьсот тридцать четыре Используя принцип Д’Аламбера, мы часто можем получить дифференциальные уравнения движения, как в случае систем с определенной степенью свободы. Мы думаем в системе координат x^z. уравнение равновесия, в результате которого L всех внешних сил, действующих на массу, возглавляется Y и Z Движение массы Т Рис пятьсот тридцать пять Но Таким образом, вдоль оси X, оси Y и оси, это необходимо применять инерционную силу. Силы инерции в направлении X, y, z равны соответственно — TX, — Tu, — Tg. Тогда уравнение движения будет X-mx=0, Y-Tu=0, Z-mz-0. (20.51) если система из нескольких масс считается свободной в пространстве,
то уравнение (20.51)должно быть записано для каждой массы системы. Далее рассмотрим применение принципа Д’Аламбера к уравнению движения колебательной системы (рис. 535, около), Две пружины с постоянными mt и t2 ′ и жесткими q и C2 из 552 двух масс. Предположим, что эти массы могут двигаться только горизонтально вдоль оси x без трения. Движение первой массы обозначается через XX, а второй-через x2. В процессе колебания массы ПА в качестве внешней силы возникает сила qxx натяжения внешней пружины и сила C2 (x2-x.) натяжения второй пружины. Сила
- сопротивления игнорируется. Затем, используя принцип Д’Аламбера, уравнение движения первой массы Х-СПАСИБО-О Написание на бланке — +Автомат(Х2-1) — mixl=о, Или W1X1+W1-C2(2 — 1) = 0. (20.52) ПА массу Т2 действует только одна сила натяжения второй пружины-С2 (г-1), и уравнение движения выглядит так t2×2+м(Х2-ХХ)=0. (20.53) если система не имеет более двух смежных связанных масс, то уравнение движения для каждой из масс должно содержать три или более неизвестных координат, например, упругая сила пружины, действующая на массы I-io, полностью определяется перемещениями x, i, xt и x<+|. 535, б). При построении
дифференциальных уравнений движения можно использовать и другой метод. Фактически, учитывая одну и ту же колебательную систему, можно было бы предположить, что существуют две соединенные пружины(рис. 535, б), подвергаясь воздействию силы инерции — /WjXj и-t2×2, прикладываются к месту расположения удаленной массы (точки 1 и 2) соответственно. После этого первая пружина нагружается с усилием-tghg-а вторая-t2×2. В этом случае движение первой массы равно удлинению первой пружины, А движение второй массы определяется суммарным удлинением обеих пружин: слегка трансформируя последнее уравнение, мы, наконец, получаем XjQ+ ^11 + (20.54) + ^2 ( ^ л+ ^22) + ^ 1 ^ 2 = 0- (20.55)
Полученные уравнения движения (20.54) и (20.55) эквивалентны системе уравнений (20.52) Людмила Фирмаль
и (20.53), но их структура отличается. Это объясняется тем, что, например, смещение конечной точки представлено второй производной от смещения всех точек, так как оно зависит от силы инерции всех масс. В дополнение к этим двум методам, второй тип уравнений Лагранжа, известный из теоретической механики, имеет вид к третьему, сила сопротивления и внешняя сила возмущения отсутствуют. (i= = 1, 2, 3,.. . п, п) <1Если ДТ>из du 1 НЛ > 1dxj » ИВС » (20.56) Где T и U-кинетическая и потенциальная энергии системы соответственно. Примените уравнение Лагранжа уравнений движения рассматриваемых двухмассовых систем и сначала запишите уравнения кинетической энергии и потенциальной энергии этой системы: 1 2 ’2′ Соответствующие производные, содержащиеся в уравнении (20.56), являются: У= / З (2~ * 1) * В 2/2 Ди ЦТС
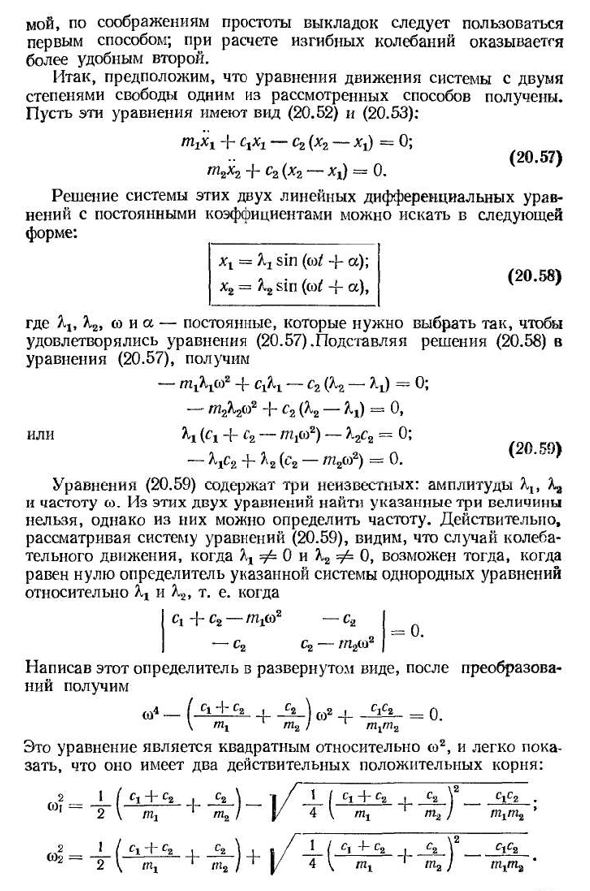
ПОСТОЯННОГО ТОКА И DHG Тогда уравнение (20, 56) относительно рассматриваемого случая принимает вид/I1ha±C2 (x2-xL)=0;gp2h2+C2 (x2-XG)=0. Следует отметить, что уравнения, полученные из уравнения Лагранжа, всегда совпадают с уравнениями, полученными на основе использования принципа Д’Аламбера. В некоторых случаях, особенно для рассматриваемых типов цепных структурных систем- 554), по соображениям простоты расчета, необходимо использовать первый метод. Поэтому уравнение движения системы с двумя степенями свободы получается одним из возможных методов. Пусть эти уравнения имеют вид(20.52) и(20.53)): +вопрос * я-СГ( * 2 — *1) = » 2 * 2 + С2(*2 — *1) = 0. (20.57))
Решение этих двух систем линейных дифференциальных уравнений с постоянными коэффициентами можно найти в виде: грех(со/А); НД=72sin(со/-{- А), (20.58) Где Zj, x2, co и a-константы, выбранные таким образом, чтобы уравнение (20.57) было выполнено. Подставляя решение(20.58) в уравнение(20.57 в), Получаем Или Кибт-С2 (В2 — ^ — я) — 0; ^2^2^2 «Б^2(^2bj)=0, бл(^1-1-^2-ТФ^сd2) — b2c2=0; — Б А+В2(С2-m2co2)=0. Уравнение (20.59) содержит три неизвестных: амплитуду Xt и частоту co. Из этих двух уравнений невозможно найти указанные три значения, но по ним можно определить частоты. Действительно, принимая во внимание систему уравнений (20.59),
можно сказать, что в случае колебательного движения определитель указанной системы однородного уравнения относительно L равен нулю, в случае 7, 0 и x2 0. С1+С Г — » 1<2^2° C2 — после записи этого определителя в расширенной форме, после преобразования, вы получите CO4_?)С02+=0 \т х’t2j ’ т г Т2 Эта формула квадратна относительно CO2 и легко показать, что она имеет два реальных положительных корня: 2—л’|С2_ _ _ я Ф и С1+С2! V C1C2. г <2_ _ 1/su4~С2|С2 / S2_i^2\2 \ тн Т*курс t2i ’ 4\м ТН^Дж*соответственно, двух собственных частот могут быть получены: (20.60) Двухчастотный колебательный процесс, полученный по формуле (20.60), в общем случае следует описывать следующим образом: H=HP sin+ » 1) 4-XI2sin («V+a2): x2=X21sin(co,/-|-a.)+K22sin(v>zt4-a2). (20.61) Здесь первый индекс величины x указывает номер
координаты, а второй индекс указывает количество термов или номеров частот в строке. Амплитуда колебаний связана с первым или вторым уравнением системы (20.59): отношение определяется из L, q+q-TX. X2_q Л? 1GSG1 2″L1S2-t2m; Или, согласно обвинительному акту +С 2-м момента ^2 2′ Тогда можно записать уравнение (20.61)=xn sin (co/+A g)-B X, 2sin (1 и X22, зависят от параметров колебательной системы. Значения амплитуды Хи и Х21 и угла сдвига фаз cq и A2 могут быть определены из четырех начальных условий, которые представляют собой значения смещения и скорости обеих масс в начальное время. Если движение системы вызвано воздействием на массу / I2, то это соответствует исходному условию
l:/=0:y Xu (0)=0; x2(0)=0(0) = 0; (0) = из четырех уравнений(20.62) получаем kuu sin oq X12sin a2=0;XgjZjj. Грех cq4-к&КУГ грех А2=-0; 5561i (O1cos{+X12co2cos<21 Искусственно выбрав начальное условие так, чтобы амплитуда=0, мы можем получить одночастотное колебание, которое представлено xn=sin (O)/+aj); L21=x^sin (a) j/+a.). (20.63) Вибрация, описываемая одной гармоникой, называется первой нормальной вибрацией. Поскольку величина отношения амплитуд ха не зависит от начальных условий, рассматриваемая одночастотная вибрация характеризуется четким отношением амплитуд, которое зависит только от параметров системы. Итак, мы определяем первую нормальную форму вибрации. Вторая форма вибрации четко
определяется соотношением X22= = if m, когда начальное условие выбрано как таковое, L12 Теперь=0 и выполняется вторая нормальная вибрация, которая объясняется формулой%12=l2sin (CO2^+a) 2); •^22 ″ ^22^*12 ((’)<2/ -p<x 2). (20.64) Обратите внимание, что собственные частоты, равные числу нормальных форм колебаний, согласуются с числом степеней свободы в колебательной системе, и две нормальные формы колебаний ортогональны. Установив общие принципы определения основных параметров вибрации упругой системы с рядом степеней свободы, можно сделать вывод, что наиболее важной и наиболее часто встречающейся в технике является вибрация.
Смотрите также:
| Вынужденные колебания с учетом рассеяния энергии | Крутильные колебания валов и систем передач |
| Критическая скорость вращения вал | Поперечные колебания стержней с сосредоточенными массами |
