
Оглавление:


Свободные колебания нелинейных систем (аналитические методы). Метод поэтапного интегрирования (метод припасовывания)
- Часто встречаются нелинейные системы, линейные в отдельных сечениях. Это может происходить, например, когда характеристики силы упругости состоят из нескольких прямых сегментов. Здесь вы можете получить точное решение для каждого сайта, интегрируя его в несколько этапов. Для этого необходимо разделить период колебаний на части, каждая из которых соответствует прямолинейной части упругой characteristic. На каждом этапе дифференциальное уравнение является линейным, интегрирование которого не составляет труда. Если известны начальные условия движения, то можно на первом этапе обобщить уравнения для определения обобщенных координат и обобщенной скорости конечных моментов.
Эти конечные значения координат и скоростей будут являться начальными значениями одновременно в следующей фазе Фазы 2.Поэтому после интегрирования линейных дифференциальных уравнений, соответствующих 2-й ступени, в качестве первого рабочего условия необходимо использовать конечные значения координат и скорости первой ступени. Эта техника должна быть распространена на все стадии. В результате нелинейные свободные колебания описываются несколькими линейными уравнениями, их число равно числу линейных ступеней. Метод пошаговой интеграции иногда называют методом подгонки или методом стыковки. Задача 20.1.На рисунке изображена нагрузка A массой t.
Теорема Штейнера о зависимости между моментами инерции твердого тела относительно параллельных осей формулируется так: момент инерции твердого тела относительно оси равен сумме его момента инерции относительно параллельной оси, проходящей через центр тяжести тела С, и произведения массы твердого тела на квадрат расстояния между параллельными осями. Людмила Фирмаль
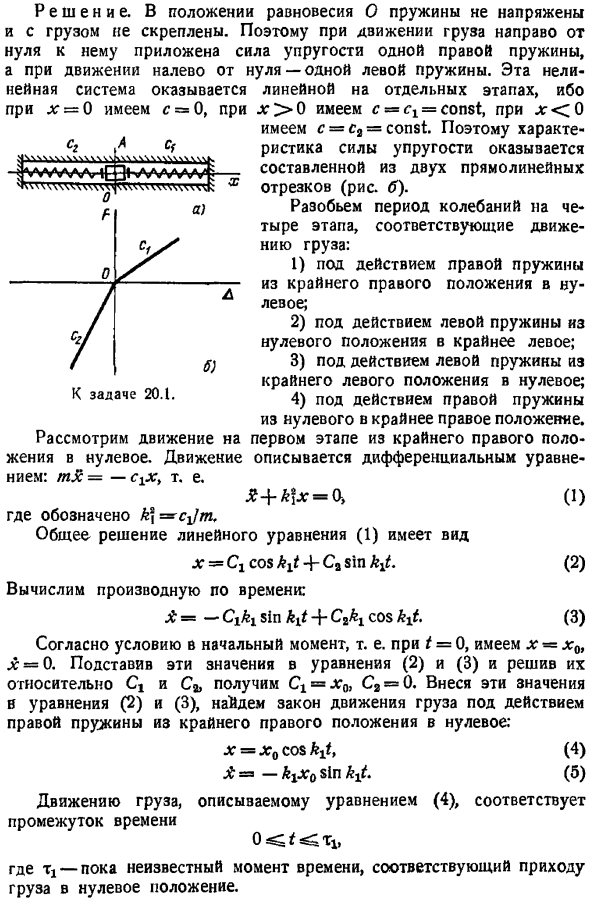
Эта нагрузка может быть перемещена в прямом направлении под действием 2 пружин. Коэффициент жесткости левой и правой пружин, которые не прикреплены к нагрузке, равен cx и c , respectively. At ранее груз находился в крайнем правом положении, определяемом координатой x x0 0, и был выпущен без начальной скорости. При положении равновесия O пружины не напряжены. Предположим, что упругая сила пружины подчиняется закону крюка, запишем уравнение движения груза и найдем период его свободных колебаний.
В общем случае метод интегрирования по степени может быть использован при интегрировании нелинейных дифференциальных уравнений в отдельные разделы. Solution. In положение равновесия O, пружина не натянута и не закреплена на load. So, если нагрузка движется от нуля вправо, то приложена упругая сила 1 правой пружины, а если она движется от нуля влево, то 1 левой пружины. Эта нелинейная система линейна на отдельных этапах. c 0 для x 0, C Ci const для x 0, x 0 с С3 Конст. Таким образом, мы видим, что свойства силы упругости состоят из 2 прямых отрезков рисунок Б. Разделите период вибрации на 4 этапа, соответствующие движению груза.
Под действием правой пружины, из крайнего правого положения Слева 2 под действием левой пружины из нулевого положения на левый конец. 3 под действием левой пружины, от левого конца до нуля. 4 под действием правой весны Рассмотрим миграцию населения до нуля. Низкое движение mx-c x, то есть От нуля до крайнего правого положения первый шаг от крайнего правого положения описывается дифференциальными уравнениями Я Яг-О -, 1 Здесь показано k cjm. Общая форма решения линейного уравнения 1 имеет вид х м, потому что Айт С грех Айт 2 Вычислить производную по времени X — ciki sin kit Ctkt cosk.
- Согласно условию, если первый момент, то есть t 0, то x x0, то X 0. Подставляя эти значения в Формулы 2 и 3 и решая относительно Cj и Cb, получаем C. x0, Ca 0.Введя эти значения в Формулы 2 и 3, можно увидеть закон перемещения груза из крайнего правого положения в нулевое под действием правой пружины. Х Х Х скит, Л — AjXfl грех кит. 4 5 Движение груза, описываемое уравнением 4, соответствует периоду Здесь TJ-Неизвестный момент, который соответствует приходу груза в нулевое положение. Чтобы найти координаты и проекции скорости в конце первого этапа, подставим Формулу 4 x a ti 0 и b.
Где JT Ti еще неизвестно. Возьми 0×0 со AjTj, а ТДж -Кашин комплект 6 6 из первого выражения, Al-II 2, то есть 7 Вводя это значение во 2-е уравнение 6, получаем Jb ti —ktxt. Таким образом, момент окончания 1-й ступени, то есть момент, когда нагрузка достигает нулевого положения, то есть т1 я 2А1 х х М1 0,а а м — Axx0.
Главный момент количеств движения твердого тела, вращающегося вокруг неподвижной оси, относительно оси вращения равен произведению момента инерции твердого тела относительно этой оси па проекцию угловой скорости вращения: Моментом инерции твердого тела 1г относительно оси называется сумма произведений масс материальных точек, из которых состоит твердое тело, на квадраты их расстояний до оси, т. Людмила Фирмаль
Эти значения x и являются становятся начальными значениями, когда нагрузка перемещается по 2-му металлу под действием левой пружины из нулевого положения к левому краю. Для упрощения последующих расчетов отсчитайте время с момента начала 2-го этапа started. So, используя результаты в 8, запишите начальные условия для 2-го этапа. 0, x 0, j — движение 2-й ступени kiXty описывается разностью 9. Формула mx — sah, т. е. X AJx-0, 10 Здесь A5 Cr n показано. Общая форма решения линейных уравнений 10 имеет вид х a2t по C8cos C4sin к. И Вычислить производную по времени Л — Чака грех Кэт Ctka потому что комплект. 12 Если вы зададите начальные условия 9 формулам II и 12, то найдете Ca 0, C4 — -x0.
Вводя эти значения в 8 C8 и C4, формула х — x0sinA2, 13 Описывается перемещение груза на этапе 2 под действием левой пружины из нулевого положения влево. Это перемещение происходит на временном интервале O tsgTj. Здесь m-неизвестный момент, который соответствует приходу груза на крайний левый борт. Используя производную по времени 13, рассчитайте прогноз скорости движения груза на этапе 2. х — kaxecoskj. И Чтобы определить x и в конце 2-го этапа, то есть в момент m, нам нужно 13 m, x x m1, и 14 m, A A m O.
Если вы присваиваете значение этого ta первому выражению 15 x ta — y-xo следовательно, в момент t9 окончания 2-го этапа, то есть Если в момент, когда груз прибывает в левый конец, то есть m l 2Aa, то проекция его координат и скорости равна 17 Величина 17 является одновременно начальным условием движения груза в 3-й ступени под действием левой пружины из крайнего левого положения в нуль.
Последующее решение задачи нецелесообразно, так как движение на 3-м этапе соответствует дифференциальному уравнению 10 и уравнению движения 13, а движение груза из нулевого положения к правому краю на 4-м этапе описывается дифференциальными уравнениями 1.Требуемый цикл t свободного колебания нагрузки равен 2 tj tj .Используя формулы 7 и 16, получаем 18 Следующее из Формулы 18, период Рассмотренные нелинейные колебания не зависят от начальных условий движения.
Смотрите также:
Предмет теоретическая механика
| Переходные процессы | Метод малого параметра |
| Нелинейные колебания. Примеры нелинейных систем | Метод медленно меняющихся амплитуд (метод Ван-дер-Поля) |
