
Оглавление:


Сравнение характеристик двигателя с полым немагнитным ротором при различных способах управления
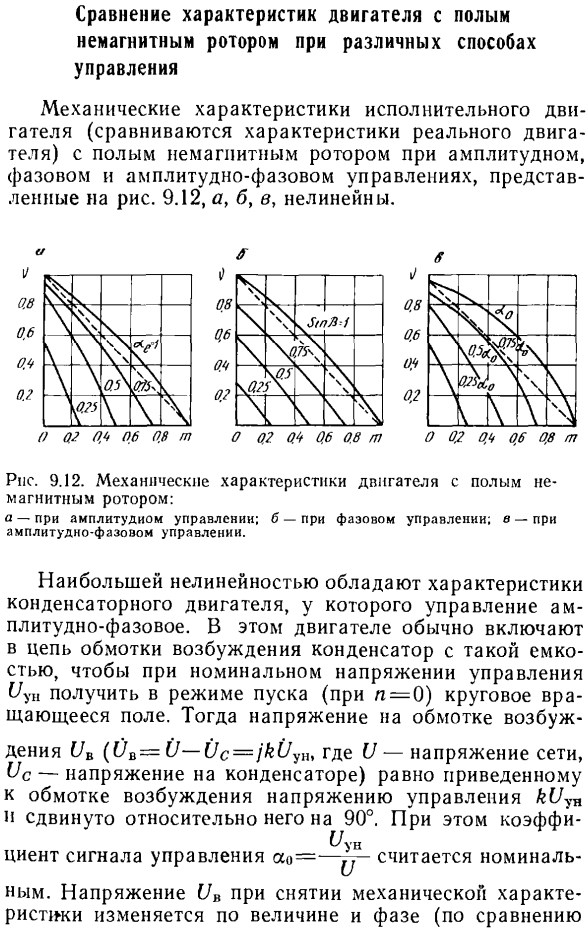
Сравнение характеристик двигателя с полым немагнитным ротором при различных способах управления. Механические свойства исполнительного двигателя (сравниваются фактические характеристики двигателя) и полого немагнитного ротора с амплитудным, фазовым и амплитудно-фазовым управлением(Рис.1) 9.12, а, в и с нелинейны.. Ху \> Л \ В ’ \ ч з \ ч ЯГ ’ х \ л Мне./ 0.8 0.6 О.} * 0.2 Около 0,4 около 0,4 около 0,8 т о 02 04 около 0,8 т о 0,8 т о 02 04 00 РПС. 9.12.Механические свойства немагнитных роторных двигателей: А-с амплитудным регулированием; б-с фазовым регулированием; в-с амплитудным регулированием. Характеристики конденсаторного двигателя с амплитудно-фазовым управлением являются наиболее nonlinear.
Механические свойства двигателя с фазовым управлением наиболее близки к линейным. Людмила Фирмаль
- In этот двигатель, конденсатор такой емкости, обычно включается в цепь возбуждения магнитного поля обмотки возбуждения, поэтому при номинальном управляющем напряжении C / un в режиме активации получается круговое вращающееся поле (n = 0). Тогда напряжение обмотки возбуждения C / V (C / b = 0— Oc = / kOu1b, где V-основное напряжение питания, Vy-напряжение на конденсаторе) равно управляющему напряжению, которое уменьшается на обмотке возбуждения и сдвигается на 90°к it. In в этом случае модуль управляющего сигнала АО =—считается номинальным. Благодаря снятию механических свойств, напряжение C / V изменяется по величине и фазе(в сравнении.
Таким образом, вращающееся магнитное поле из кругового (n〜0; a = ao) (при том же напряжении, что и при запуске) становится эллиптическим (также при nF0 и a = ai).при наличии обратного магнитного поля частота вращения конденсаторного двигателя на холостом ходу уменьшается. Когда ты закончишь На низких и средних скоростях вращения крутящий момент конденсаторного двигателя более важен, чем двигатель, управляющий амплитудой и фазой. Это объясняется увеличением напряжения на 1 / В. рост (/в) увеличивает магнитный поток машины и увеличивает крутящий момент.
Примеры решения, формулы и задачи
| Решение задач | Лекции |
| Расчёт найти определения | Учебник методические указания |
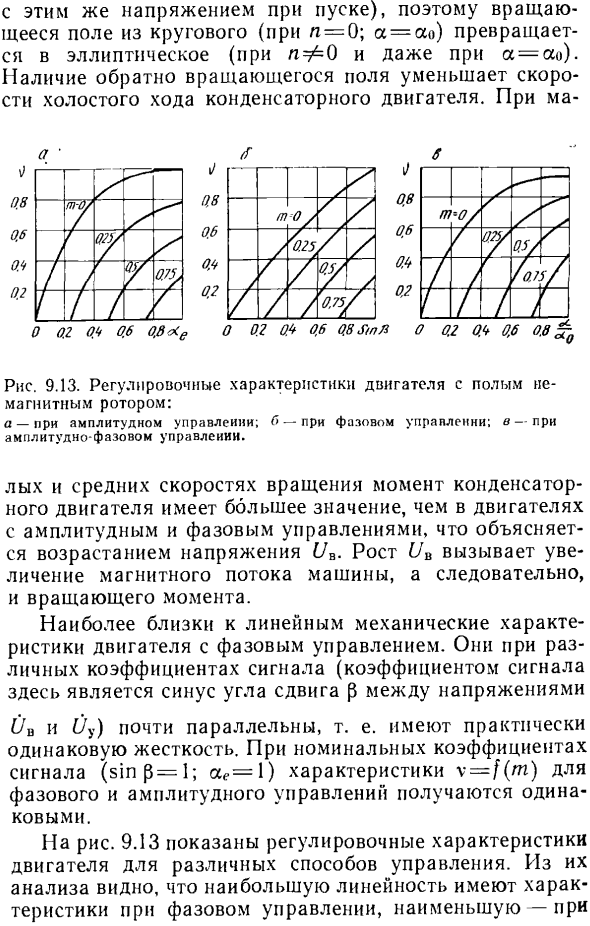
- Они расположены при различных коэффициентах сигнала(коэффициенты сигнала здесь представляют собой синус угла сдвига (5 между напряжениями O in и 0 y) почти параллельны. То есть она имеет практически такую же жесткость. Для номинального коэффициента сигнала (8tr = 1; ae = 1) Характеристики фазового регулирования и амплитудного регулирования (y = f (t)) одинаковы. Рисунок 9. 13 показаны характеристики настройки двигателя для различных методов управления. Из их анализа видно, что характеристики фазового управления являются наиболее линейными, а характеристики амплитудно-фазового управления-наименьшими.
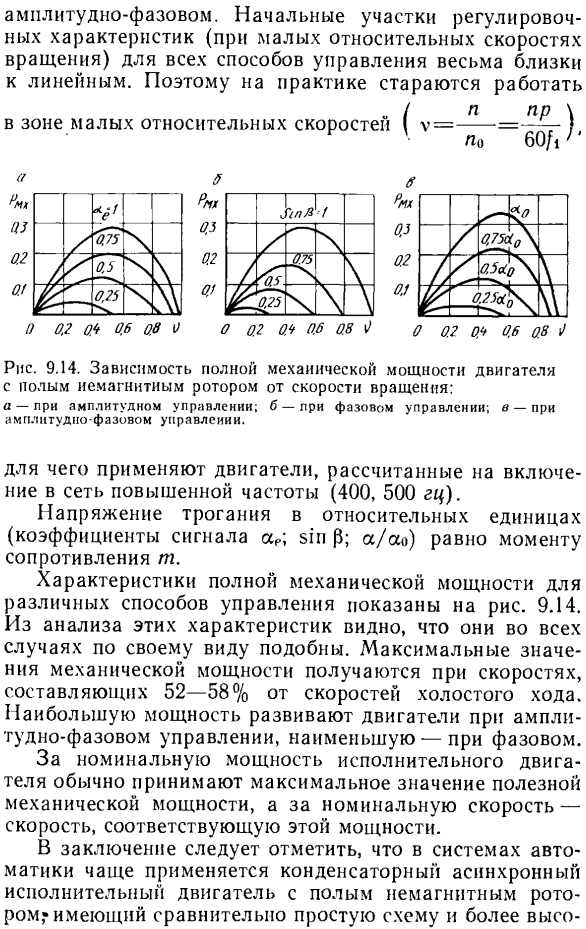
Начальный участок регулировочных характеристик всех методов управления (если относительная скорость вращения низкая) очень близок к линейному. Поэтому на практике они стараются работать 。 / н ПР \ I y = = для зон с низкой относительной скоростью-]、 * U 60/1 7 Рис. 9.14.Зависимость суммарной механической мощности двигателя с полым немагнитным Ротором от скорости вращения: А-с амплитудным регулированием; б-с фазовым регулированием; в-с амплитудным регулированием. Используют двигатели, предназначенные для включения в сети с повышенной частотой (400, 500 Гц). Пусковое напряжение{коэффициент сигнала ae \ zm P; a / oo) в относительных единицах равно моменту сопротивления t. Суммарные механические силовые характеристики различных методов управления приведены на рисунке. 9.14.
Если проанализировать эти характеристики, то можно увидеть, что они похожи по внешнему виду во всех случаях. Людмила Фирмаль
- Максимальная механическая мощность получается при скорости 52-58% от скорости холостого хода. Максимальная мощность вырабатывается двигателем с амплитудно-фазовым регулированием и имеет минимальную фазу. При номинальной мощности исполнительного двигателя обычно используется максимальное значение эффективной механической мощности, а при номинальной частоте вращения-скорость, соответствующая этой мощности. В заключение следует отметить, что в системах автоматики чаще используются конденсаторы с полыми немагнитными роторами с относительно простой схемой и высоким коэффициентом мощности (cos p = 0,8-0,95).Однако в любом случае выбор способа управления зависит от условий работы системы и требований к исполнительному механизму.
