
Оглавление:


Сложение скоростей
- Если OiX ^ iZi — система фиксации координатной оси, а Oxyz — мобильная система (рис. 88), как вы знаете, абсолютное движение точки называется движением относительно системы фиксации оси, и движение сравнивается это именно относительно. Переносимое движение точек называется мгновенным движением наряду с относительно неподвижной системой перемещения оси. Относительная скорость и ускорение представлены ar, представлены ve и ae и представлены v и a.
Например, если предположить, что поведение звезд в Солнечной системе равно нулю, то центр тяжести этой системы, находящийся очень близко к Солнцу, будет иметь линейное и равномерное движение. Людмила Фирмаль
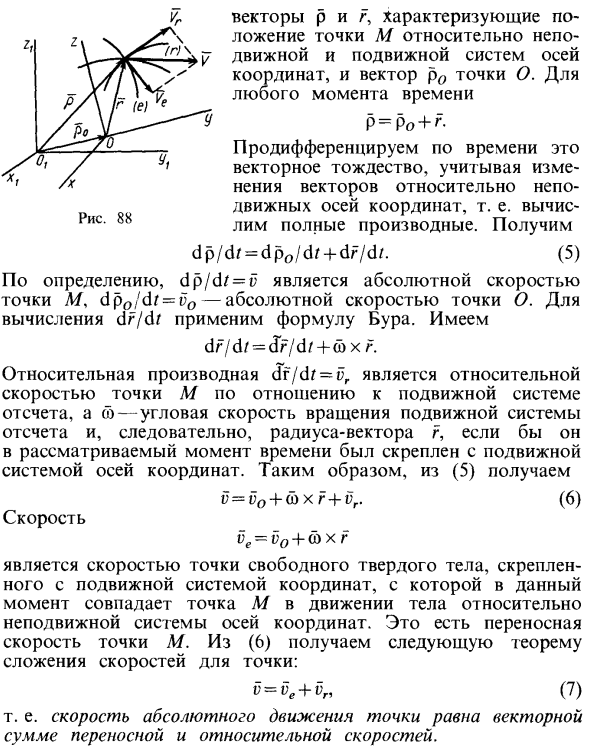
Другие характеристики этих движений снабжены соответствующими значками. Движение оси координат относительно стационарной системы координат характеризуется, например, скоростью ее поступательного движения e0 наряду с вектором точки O и угловой скоростью, а также ее вращением вокруг O. Заставить точку М двигаться относительно движущейся системы координат. Получите теорему сложения скорости. Для этого Вектор буровых установок, который характеризует положение точки M относительно системы фиксации и перевода координат, и вектор p0 точки O p = p0 + g.
- Учитывая изменение вектора относительно фиксированных осей, эта идентичность вектора различается по времени. То есть рассчитать общую производную. dp / dz = dp0 / dz + dr / dz получается. (5) По определению dp / dz = i> — абсолютная скорость в точке M, а dpo / dz = t> o — абсолютная скорость в точке O. Примените формулу Бур для расчета df / dz. dr / dz = <3r / dz + ft> xr. Относительная производная df / dz = a является относительной скоростью точки M относительно движущейся системы отсчета. d — угловая скорость вращения движущейся системы отсчета и, как результат, радиус-вектор r, если он привязан к движущейся системе.
Естественным состоянием равновесия стержня является предполагаемая форма, когда, например, он помещен на стол, сила, стремящаяся его деформировать, не действует. Людмила Фирмаль
Координатные оси. Следовательно, (5) дает a = yo + yxr + yr. (6) скорость »E = d0 + dxr — это скорость точки свободного твердого тела, зафиксированной в движущейся системе координат, и точка M в это время совпадает с движением объекта относительно неподвижной системы координатных осей. Это транспортная скорость точки М. Из (6) получим следующую теорему для добавления скорости точек. Другими словами, абсолютная скорость движения точки равна векторной сумме переносной скорости и относительной скорости.
Смотрите также:
Задачи по теоретической механике
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
