
Оглавление:


Скорости точек тела при плоском движении
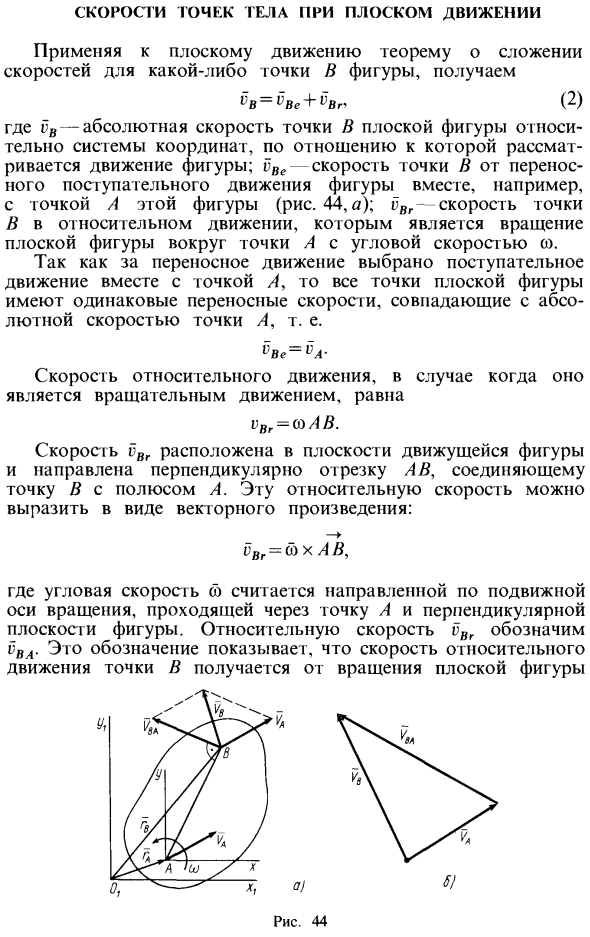
- Применяя теорему сложения скорости для плоских точек к плоскому движению фигуры, vB = vBe + vBr, (2). Здесь ива — это абсолютная скорость точки B плоской фигуры относительно системы координат, в которой учитывается движение фигуры. vBe — скорость точки B из относительного перевода фигуры. Например, вместе с точкой А этой фигуры (рис. 44, а). vBr — скорость точки B в относительном движении.
Это вращение плоской фигуры вокруг точки А с угловой скоростью ω. Поскольку перемещение по точке A выбрано для переносного перемещения, все точки на плоской фигуре имеют одинаковую переносную скорость и совпадают с абсолютной скоростью точки A. Скорость относительного движения равна vBr = (oAB. Скорость vBr находится в плоскости движущейся фигуры и направлена перпендикулярно отрезку AB, соединяющему точку B и полюс A. Эта относительная скорость может быть выражена как векторное произведение. cBr = yx AB.
Давайте посмотрим за пределами атмосферы достижение нулевой гравитации материальной точки в космическом аппарате, который движется поступательно к земле как спутник. Людмила Фирмаль
Здесь угловая скорость r считается ориентированной вдоль оси вращения, проходящей через точку A и перпендикулярной плоскости фигуры. Относительная скорость vBr обозначена bvl. Это обозначение указывает на то, что относительная скорость точки B получается из вращения плоской фигуры Рисунок 44 м-м Вокруг оси движения через точку А или вокруг точки А. Уравнение (2) (3) где gvl = w / 1, (4) Вектор t> BX перпендикулярен отрезку AB и направлен на вращение плоской фигуры (рис. 44, а). Используйте Рисунок 45 (3), может быть построен с выбранной массой Точка B, главный треугольник скорости (рис. 44, б).
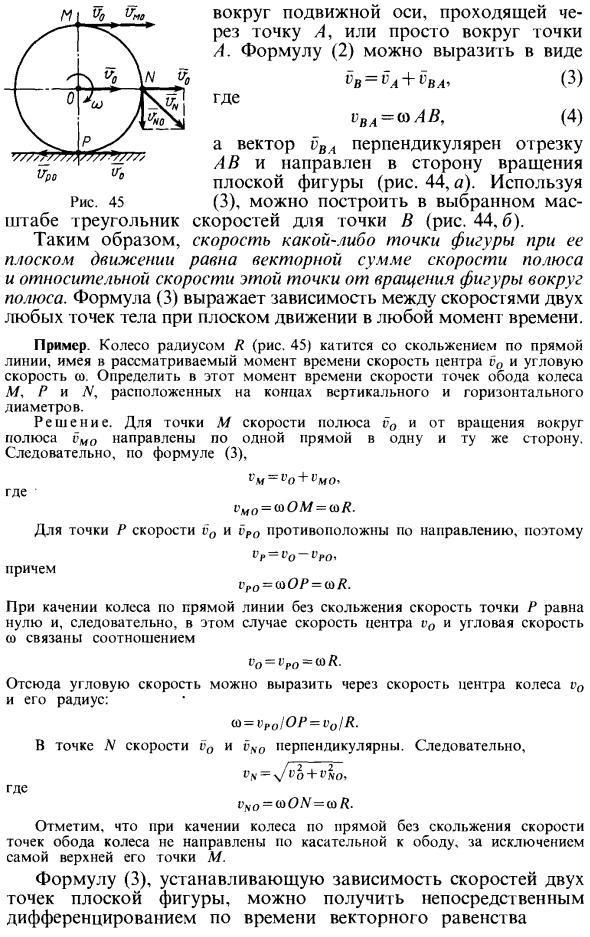
- Следовательно, скорость точки формы во время ее плоского движения равна векторной сумме скорости полюса и относительной скорости этой точки от вращения формы вокруг полюса. Уравнение (3) представляет соотношение между скоростями любых двух точек тела во время плоского движения в любой момент времени. Пример. Колесо радиуса R (рис. 45) вращается при скольжении по прямой и мгновенно имеет центральную скорость i> o и угловую скорость R Следовательно, угловая скорость может быть выражена центральной скоростью колеса и его радиусом. ■ vroIOP = voIR.
Обратите внимание, что если колесо вращается по прямой без проскальзывания, скорость точек обода колеса равна ns в тангенциальном направлении обода, за исключением самой высокой точки M. Уравнение (3), которое устанавливает зависимость скорости двух точек от плана этажа, может быть получено путем прямой дифференциации векторного уравнения по времени. гв = гл + ав, Он всегда действителен (см. Рис. 44, а). При дифференцировании вектора учитывайте изменения в базовой фиксированной системе координат O1-’C1y. То есть вычислите полную производную этих векторов.
Ускорение точки плоской фигуры в этом случае направлено к центру мгновенного ускорения, так как оно состоит только из относительной нормальной составляющей от вращения вокруг мгновенного центра ускорения. Людмила Фирмаль
У нас есть По-видимому, drB / dt = vB, drA / dt = rA — это скорость точек B и A. Поскольку вектор AB соединяет две точки на виде сверху, абсолютное значение не изменяется даже при перемещении вида сверху. Производная по времени от вектора, такая как вектор постоянного модуля по скалярному аргументу, может быть выражена в виде A (A) -axL. Здесь L — вектор угловой скорости вращения AB, поэтому И вид сверху, с которым вектор AB связан | последний vB = vA + co x AB ._ * Если мы введем обозначение vBA = <ax AB, Другими словами, получить выражение (3).
Смотрите также:
Задачи по теоретической механике
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
