
Оглавление:


Скользящие векторы, сходящиеся в одной точке. Результирующий вектор
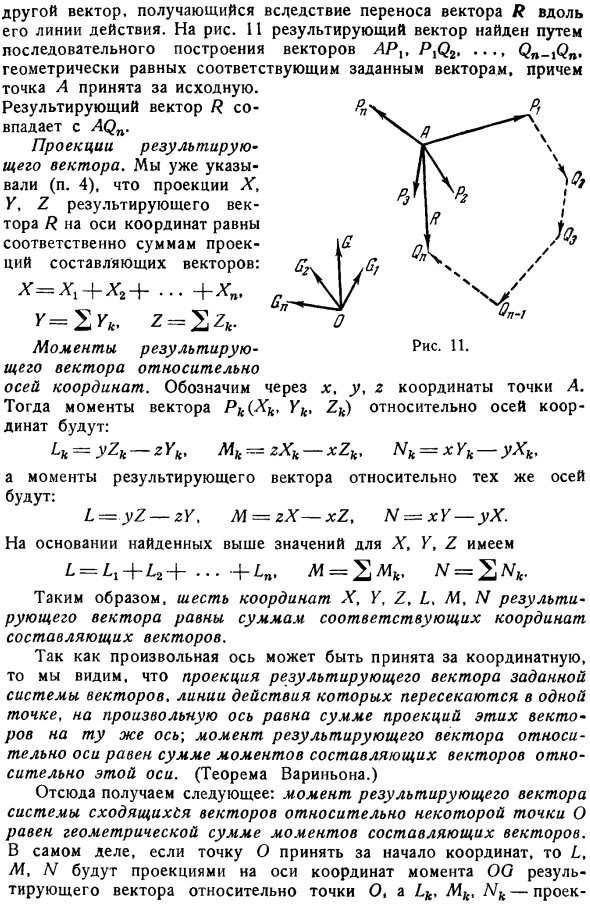
- Учитывая вектор движения P2 hGF9, его линии действия пересекаются в определенной точке A. Каждый из этих векторов может двигаться вдоль своей линии действия. 11. Тогда результирующий вектор системы рассматриваемых векторов равен геометрической сумме, вектору Р, приложенному к точке А, или другому вектору, полученному в результате переноса вектора Р вдоль его линии action. Как показано на Рисунке результирующий вектор геометрически равен соответствующему заданному вектору AP , P ,… найденная путем построения непрерывно, точка А является начальным вектором. Результирующий вектор P соответствует A 2n. Проекция результирующего вектора.
Может, наконец, случиться, что изображаемая физическая величина такова, что два различных вектора изображают две различные физические величины, т. Людмила Фирмаль
Мы уже указывали пункт 4.Проекции X, Y и 2 на координатные оси результирующего вектора P соответственно равны сумме проекций составляющих векторов X = Xx+ 2 + + н Г = Ык. 2 = 2К. Результирующий вектор относительного момента Координатные оси. если он представлен x, y, 2, то моменты вектора Pk Xk, Yk, 2k для осей имеют вид: = Г к 2 к МК = rXk x2k, НК = значения ых И момент результирующего вектора для той же оси будет равен: Д. = У2 ЗГ. М = ГХ Х2. Ч = ху ух. Координаты точки А Исходя из значений X, K, 2 выше, b = b1 + b2 + … м =. = 2И к. Итак, 6 координат X, Y, 2, I, M, N в результирующем векторе будут равны сумме соответствующих координат компонента вектора.
- Поскольку любую ось можно рассматривать как координату 1, то можно видеть, что проекция результирующего вектора заданной системы векторов, линии действия которых пересекаются в 1 точке на любой оси, равна сумме проекций этих векторов на одну и ту же ось. Момент результирующего вектора для оси равен сумме моментов составляющих вектора вокруг этой оси. Теорема валиньона. Отсюда это выглядит так: в момент результирующего вектора системы сходящихся векторов для определенной точки о равен геометрической сумме моментов компонент вектора.
Такого рода векторы, не имеющие ни определенной линии действия, ни определенной точки приложения, называются свободными. Людмила Фирмаль
В самом деле, точки o, как происхождение, Я, м, х, точка О результатах против вектора момента ОО осей проекции, Лк, Мк, Ик той же точки относительно вектора Рк от 06к проекция будет. Однако предыдущие равенства, 06 это вектор 06x, OO2,…. Это показывает, что это геометрическая сумма 06г. Примечание иногда кажется необходимым разложить данный вектор AP на другие векторы, применяемые в точке A. Например, с помощью параллелограмма всегда можно разложить вектор AP на 2 других с заданным направлением AB и AC, где плоскость содержит AP.
Смотрите также:
Предмет теоретическая механика
