
Оглавление:



Синтез компаундирующих связей
- Синтез соединения Сложным системам управления не хватает идеального дифференциального устройства, поэтому чаще всего достигается только приближение к инвариантности управляющих переменных от помех. Достигается частичная инвариантность (вплоть до i-й производной путем возбуждения. Эти системы включают в себя автоматические электроприводы, созданные специально по схеме двигателя генератора. Свойства системы в отношении действий настройки. )
Или создание дополнительных соединений в замкнутом контуре управления для точных отклонений инвариантности при малых значениях е может дать тот же результат. Одна такая связь представляет собой сложную связь. Он может быть создан, когда регулируемое поведение характеризуется двумя координатами, которые зависят от одного и того же внешнего воздействия и взаимосвязаны.
Для генераторов такими величинами являются напряжение и ток, для двигателей — крутящий момент и частота вращения, для гидравлических и пневматических устройств — давление и расход рабочей жидкости (жидкости или газа). Людмила Фирмаль
Дополнительное соединение в замкнутом контуре управления отклонением, где входной сигнал является координатой настраиваемого объекта и взаимосвязано с регулируемой координатой, называется составным соединением. В общем случае для сложной связи требуется элемент, который измеряет промежуточные координаты объекта, и элемент преобразователя, который создает сигнал, который компенсирует влияние возмущений на настраиваемые координаты. Синтез цепочки синтеза начинается с выбора измерительного элемента и точки включения схемы в управление с обратной связью.
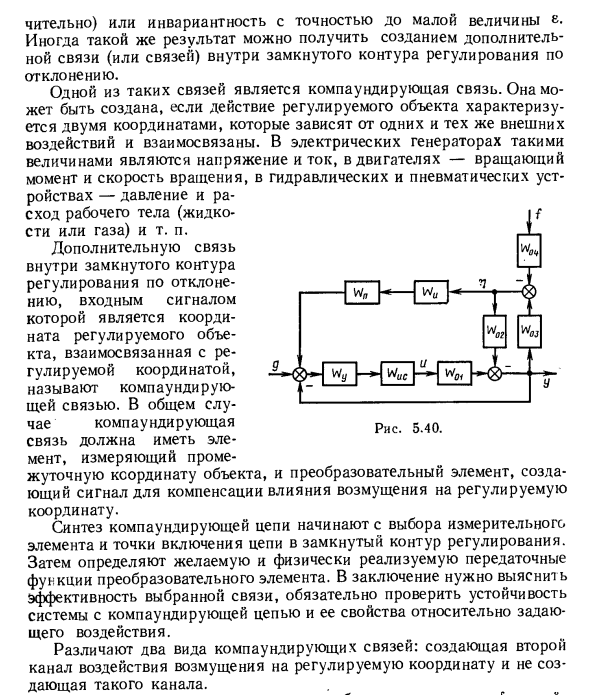
Затем определяется желаемая физически осуществимая передаточная функция элемента преобразователя. В заключение необходимо проверить правильность выбранного соединения. Обязательно проверьте стабильность системы, используя цепочку рецептур для основного действия и его свойств. Различают два типа сложных соединений. Тот, который создает второй канал эффектов возмущения в регулируемых координатах, и тот, который не создает такой канал. 1! N он -I-Б Рисунок 5.40. Для управляемого объекта предположим, что возмущение / влияет на управляющую координату y только через некоторую промежуточную координату TJ, и что управляющий эффект влияет на промежуточную координату только через управляемую координату.
- Затем вы можете создать составное соединение, используя промежуточные координаты d) (рисунок 5.40). Структурная диаграмма показывает в этом случае, что составная цепь является вторым каналом / регулируемой координатой y влияния возмущения. Предположим, что выбран измерительный элемент и точка переключения сопутствующей цепи. Объясните основные этапы синтеза За этой схемой определяют желаемую передаточную функцию элемента преобразователя. Построить передаточную функцию системы для возмущения в соответствии со структурной диаграммой (рисунок 5.40) W, (s) = \ -Woi (s) [W „(s) Wn (s) Wy (s) Wac (s) Woi (s) — -1 ^ 02 (S) l | / | 1 + wy (S) WKC (s) Woi (s) + \ r03 (s) [\ V02 (s) — -Wm (s) Wn (s) Wy (s) WiiC (s) WQi (s) WQ3 (s)] . (5,69) Условие инвариантности — это уравнение, которое обнуляет числитель (5.69) передаточной функции.
K (s) Wa (s) Wy (s) \ Vac (s) Woi (s) -W02 (s). (5,70) Присвойте значение функции переноса элемента (5.70) (U7 | (s) = kiRi (s) / Qt (s), где Rt (s) и Qt (s) равны 1) Является многочленом равным s) Wy KHL (s) Rn (s) Ry (s) Rw (s) Rox (s) = = k02R0t (s) Qn (s) Qn (c) Qy (s) QIK (s). (5,71) Есть общие факторы с левой и правой сторон этого равенства (S) Ry (s) Rus (s) Roi (s) = B (s) R (s); R02 (s) Qa (s) Qy (s) QHC (s) = B (s) Q (s) , Тогда условие инвариантности (5.71) состоит в следующем. (S) R (s) = коА (с) Q (s). (5,72)
Чтобы удовлетворить (5.72), элемент преобразователя составной цепи К = * б. / MAAi; Rn (s) = Q (sy, Qn (s) = R (s) (5,73) Людмила Фирмаль
В большинстве случаев последние два уравнения не могут быть выполнены, потому что нет идеального дифференциатора. Далее, полиномы Rlt (s) и Qn (s) должны быть выбраны для достижения частичной (включая до i-й производной) инвариантности. Q.M «* <*) + Nt (s) s ^ -J Rn (s) R (s) -Qn (s) Q (s) = J ‘ Где N {(s) — многочлен степени s (/ -m + 1), и его коэффициент должен быть как можно меньше. ^ (S) — многочлен степени s (n-1). m и n — степени многочленов R (s) и Q (s) соответственно.
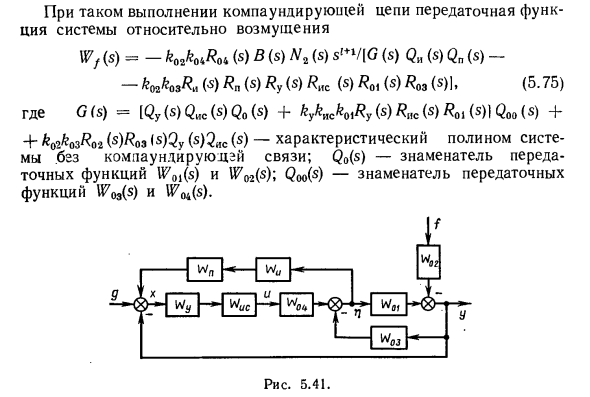
В этом варианте составной цепи передаточная функция системы для помех Wf (s) = -k02k0iR0i (s) B (s) N2 (s) s, n / [G (s) Q „(s) Qn (s) — — * oAs * «(«) /? N (s) муха (S) лиса (с) * ой (S) ^ 03 (S) l. (5,75) Где Gfs) = [Qy (s) Q HC (s) Qo (s) ~ f «^ y ^ HC ^ Ol ^ y (s) * (S) ^ 01 (S) | Q00 (S) + koikaRoi (s) /? 03 ls) 3y (s) 3 «c (s) — характеристический многочлен системы без сложной связи. Q0 (s) — знаменатель передаточной функции №0i (sj и Wm (s); Qoo (s) -передача Функциональный знаменатель Рисунок 5.41.
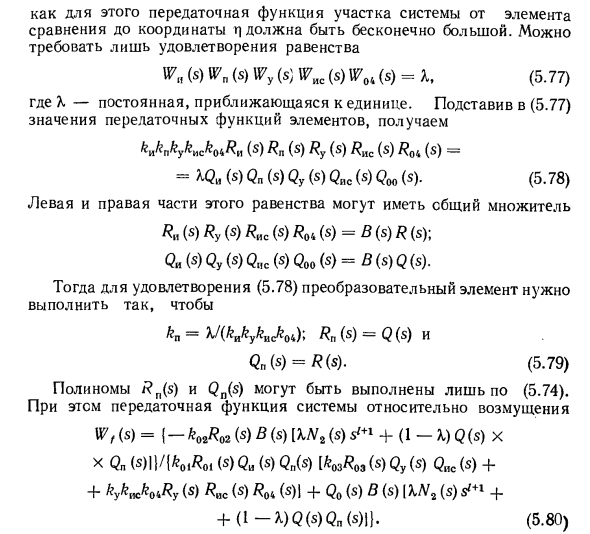
И теперь достигнута частичная (в том числе максимальная / порядок порядка) инвариантность регулируемых координат от возмущений. Однако характеристический многочлен был изменен. Вам необходимо проверить, остается ли система стабильной и насколько доступны запасы стабильности, а система d-tracking также должна проверить качество характеристик перехода для мастер-действия. При неадекватных результатах испытаний корректор может совместно рассчитать составную муфту в попытке выполнить требования для компенсации влияния помех и воспроизведения поведения привода.
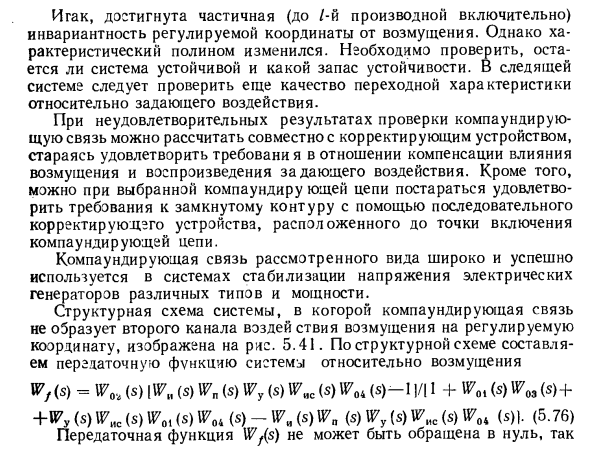
Кроме того, вы можете использовать устройство последовательной коррекции, расположенное вплоть до точки, в которую вы хотите включить составную цепь, чтобы вы могли использовать выбранную составную цепь для удовлетворения требований замкнутой цепи. Рассматриваемые типы соединений широко и успешно используются в системах стабилизации напряжения для различных типов и генераторов энергии. Структурная схема системы, в которой соединительное соединение не образует второй канал влияния возмущения на регулируемые координаты, изображена в Cassock. 5,41.
Построить передаточную функцию системы в соответствии с структурной схемой W / (s) = W0, (s) [W „(s) Wn (S) Wy (s) W9C (s) \ V04 (s) -11 / | I + Wox (секунды) W09 (секунды) + + Wy (s) \ ViK (s) WQX (s) — (s) U7n (s) U? Y (s) Gis (s) \ V0, (s)}. (5.76) Передаточные функции W и (s) не могут быть нулевыми. Для этого передаточная функция системного сечения от элемента сравнения к координате n должна быть бесконечно большой. Вы можете только запросить равенство We (s) Wn (s) Wy (s) WHC (s) Wok (s) = A, (5.77) Где X — единица, приближающаяся к постоянной. Подстановка значения передаточной функции элемента в (5.77) дает следующее. Mn * DAL (S) Rn (s) Ry (s) RHC (s) Rok (s) — -Щ, (s) Qn (s) Qy (s) Q c c (s) Qw (s). (5,78) Есть общие факторы с левой и правой сторон этого равенства Rn (s) Ry (s) „c (s) R0, (s) = B (s) R (s); QAs) Qy (s) Qnc (s) Qoo (s) = B (s) Q (s).
Затем запустите элемент преобразователя, чтобы удовлетворить (5.78) K = Rn (s) = Q (s) и Qn (s) = R (s). (5,79) Полином я N (s) и Qn (s) могут быть удовлетворены только с помощью (5.74). В этом случае передаточная функция системы возмущается Wf (s) = {k02R02 (s) B (s) [XNt (s) + (s) x x Qn (S) I | / (* OI * 01 (s) ft, (s) Qn (s) 1 ^ 03 ^ 03 (s) Qy (S) Qnc (s) + + kykJiokRr (s) RHC (s) ) Lolto (s) | + Qo (S) в (s) | \ N2 (s) ^ + + (L-X) Q (s) Qn (s) l). (5,80) Коэффициенты многочлена N2 (s) не зависят от комплексной связи. Следовательно, в уравнении (5.80) коэффициент числового члена S * 4 «1, s / + 2f … имеет значительное значение. Чем меньше коэффициент члена с малой степенью s, тем меньше разность (1 -X) меньше: производная от / (включительно) до / инвариантности / y, но в лучшем случае только приблизительные значения вплоть до небольшого значения e.
В знаменателе (5.80) порядок последнего слагаемого является максимальным. Поэтому необходимо ограничить приблизительное значение X до 1 и проверить запас устойчивости системы с составной цепью. Нежелательные эффекты этой схемы могут быть компенсированы устройством коррекции. Это должно быть предусмотрено на той части цепи, которая непосредственно не закрыта композитной цепью. В этом случае вы можете предоставить необходимые динамические свойства системы для основного действия. Рассматриваемый тип соединения успешно используется в системах, где регулируемый объект или исполнительный элемент представляет собой независимый электродвигатель постоянного тока.
Смотрите также:
Примеры решения задач по теории автоматического управления
