
Оглавление:

Сельсины в трехфазной системе синхронной связи
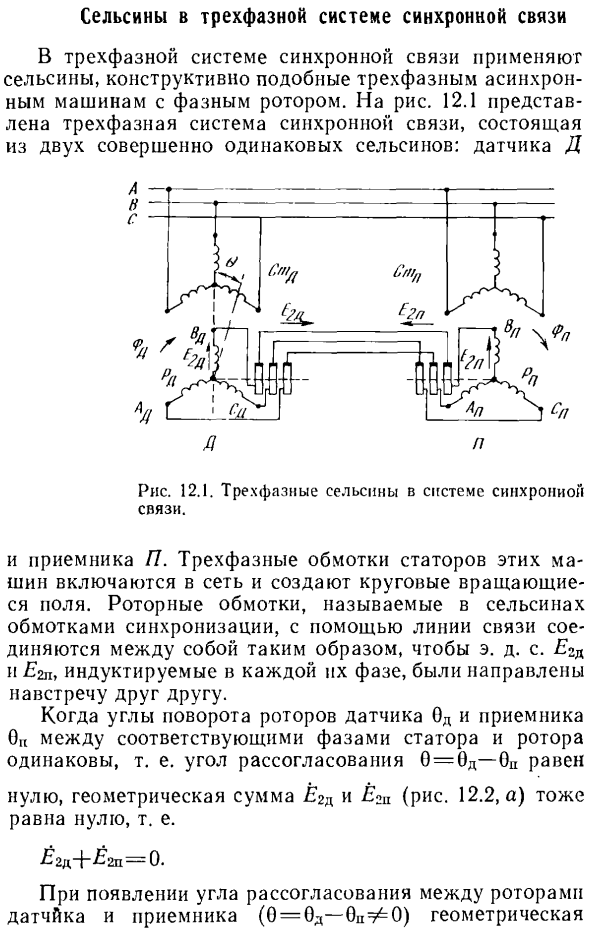
Сельсины в трехфазной системе синхронной связи. В трехфазных синхронных системах связи sersin является used. It конструктивно аналогична трехфазной асинхронной машине с фазным ротором. На рисунке 12.1 показана 2-фазная сигнальная система, состоящая из 2 полностью идентичных серицинов. Датчик d Обмотка ротора, которая называется синхронной обмоткой в синхро, является e. d. s Ya2d и Erl были направлены в своих соответствующих фазах и направлены друг на друга. Если угол поворота ротора датчика 0D и приемника 0c между статором и соответствующей фазой Ротора одинаков, то есть угол диссонанса О=0Д-0.
Трехфазные обмотки статоров этих машин включены в сеть и создают круговое вращающееся магнитное поле. Людмила Фирмаль
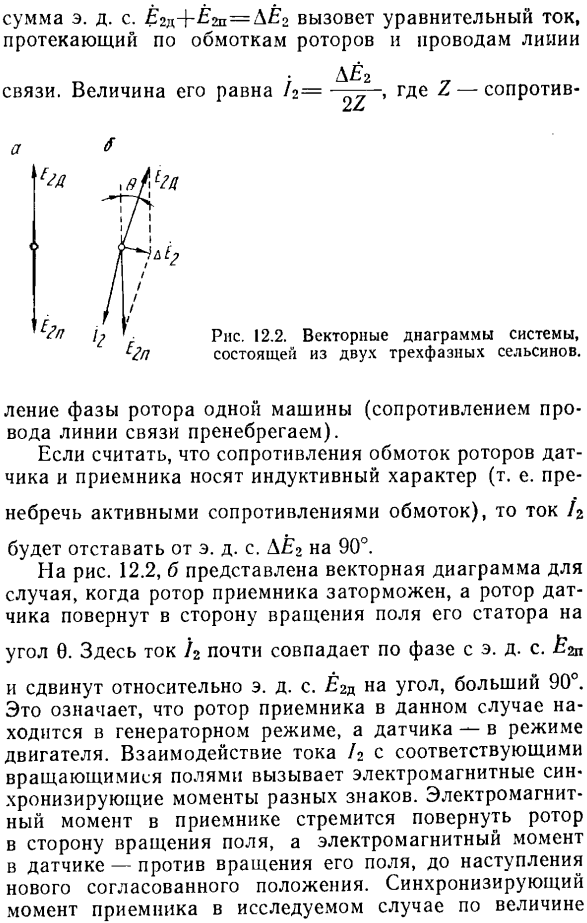
- Геометрические суммы нуля, E2d и E * u (рис. 12.2, а) также равны нулю, т. е. ■^ 2d » b ^ 2n = 0. Несогласованный угол между Ротором датчика и приемником (0 = 0d-0i =? Если отображается ^ 0) Общение. Размер его Вызывает перенапряжение токов, роторов и проводку лишайников E. D. S. e2l sum \ E2a =ae2, протекающий через обмотки Где 2-сопротивление L ^ 2 Равно/ 2 = Рис. 12.2. Векторная иллюстрация системы, состоящей из 2 3-фазных сельсин. 1. фаза Ротора машины (игнорируйте сопротивление провода линии связи). Если предположить, что сопротивление обмотки ротора датчика и приемника является индуктивным (т. е. игнорируется активное сопротивление обмоток), то ток D Э будет поздно. d. s Дё290°.
На рис. 12.2 б векторная диаграмма показывает случай, когда Ротор приемника дросселируется, а Ротор датчика вращается в следующем направлении при вращении поля статора. Здесь фаза тока 12 приблизительно равна e. d. s переход от электронной. д. с углом, превышающим 90°.Это означает, что приемный Ротор в данном случае находится в режиме генератора, а датчик-в режиме двигателя. Взаимодействие тока/ 2 с соответствующим вращающимся полем вызывает электромагнитный момент синхронизации различных кодов. Электромагнитный момент приемника стремится вращать ротор в направлении вращения магнитного поля, а электромагнитный момент датчика не поддается вращению магнитного поля до тех пор, пока не возникнет новое согласованное положение.
| Поворотный трансформатор-построитель. | Устройство однофазных контактных и бесконтактных сельсинов. |
| Сельсины. Общие сведения. | Работа однофазных сельсинов в индикаторном режиме. |
Примеры решения, формулы и задачи
| Решение задач | Лекции |
| Расчёт найти определения | Учебник методические указания |
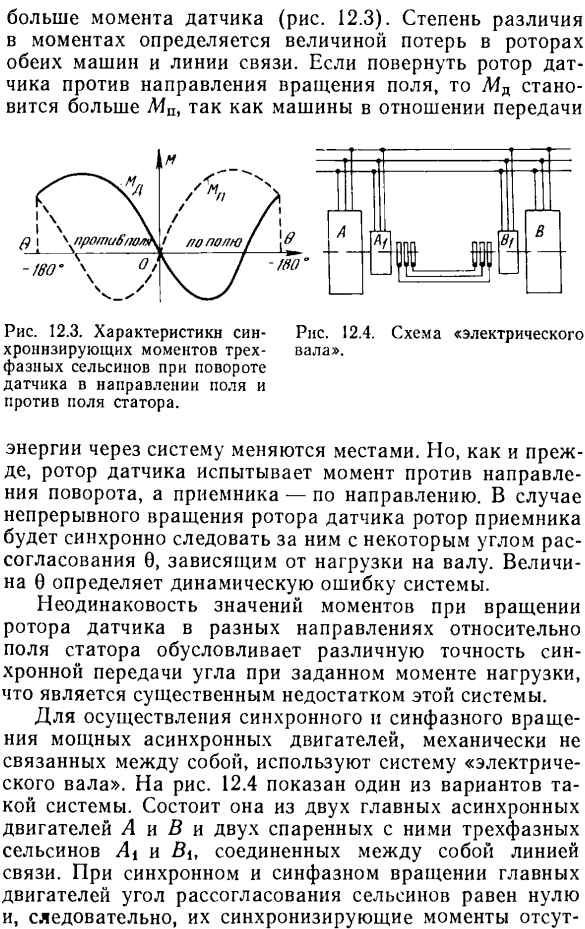
- Момент синхронизации приемника исследуемого случая является максимальным Момент срабатывания датчика (рис. 12.3). Степень разности моментов определяется величиной потерь ротора и линий связи обеих машин. Если вращать ротор датчика относительно направления вращения магнитного поля, то Md становится больше Mn. Энергия через систему обменивается. Однако, как и раньше, Ротор датчика получает момент относительно направления вращения, а приемник находится в этом положении. direction. In
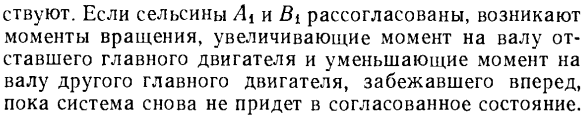
Значение 0 определяет системную динамическую ошибку. Поскольку значения моментов, в которых Ротор датчика вращается в разных направлениях относительно магнитного поля статора, не равны, точность синхронной передачи угла при заданном моменте нагрузки различна. Это существенный недостаток данной системы. Для осуществления синхронизации и синфазного вращения мощного асинхронного двигателя, механически не связанного между собой, используют систему «электрический вал».На рис. 12.4 показан 1 из вариантов такого system.
В случае непрерывного вращения ротора датчика, ротор приемника синхронно следует за рассогласованным углом 0, в зависимости от нагрузки на вал. Людмила Фирмаль
- It состоит из 2-х главных асинхронных двигателей А и В, и 2-х пар трехфазных сельсин А1 и В1, соединенных между собой связью line. In синхронизация и синфазное вращение главного двигателя, несогласованные углы сельсинов равны нулю, поэтому для них нет момента синхронизации. если selsyny L4 и 61 не согласуются, возникает вращательный момент, который увеличивает момент задержки вала главного двигателя, уменьшая момент движения вала другого главного двигателя вперед до тех пор, пока система не будет отрегулирована снова.
