
Оглавление:


Регулирование скорости вращения
Регулирование скорости вращения. Как установлено выше, частота вращения асинхронного двигателя n = n0. Из этого уравнения видно, что можно управлять скоростью n, изменяя частоту(и число пар полюсов p и скольжения 5). Управление скоростью осуществляется путем изменения частоты (и основано на изменении скорости вращения поля статора) 60б Пирог-он гладкий и в широком диапазоне. Однако этот способ регулировки не получил широкого распространения, так как необходимо менять специальный преобразователь частоты (тиристорный или электромеханический), с которым соединены 1 или более одновременно регулируемых асинхронных двигателей.
Регулировка скорости вращения путем изменения числа полюсов обмотки статора происходит постепенно. Людмила Фирмаль
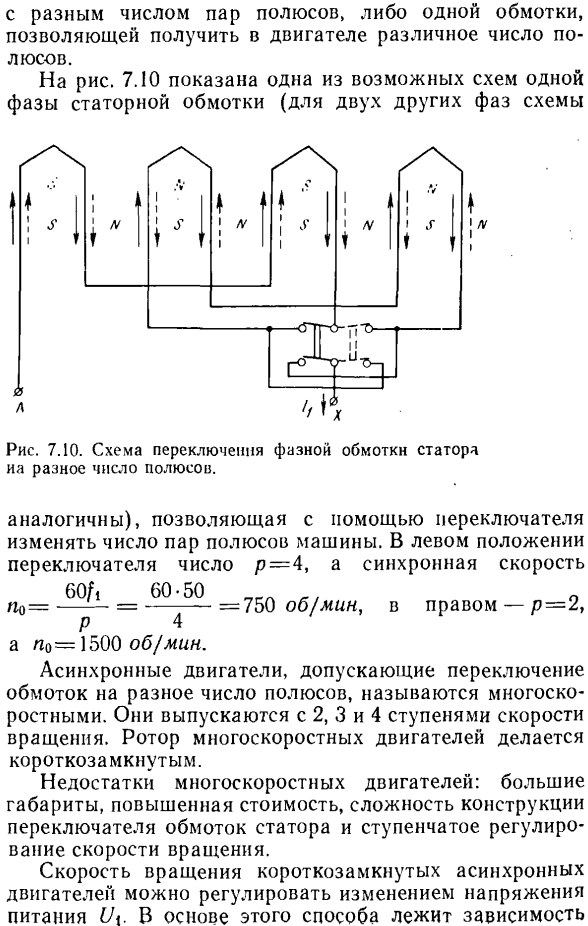
- Количество пар полюсов в обмотке статора двигателя может быть изменено путем размещения 2 обмоток разных пар полюсов в пазу статора, или одной из 1 обмоток, где вы можете получить разное количество полюсов в двигателе. На рис. 7.10 показана 1 возможная схема для 1 фазы обмотки статора(для остальных 2 фаз схемы) Также), вы можете использовать переключатель для изменения количества пар полюсов в машине. Переключатель левое положение, числовые П-4 и синхронная скорость 60 ^ 60 * 50 ^ 0 By = = = 750 об / мин, правая сторона-p = 2, n0 = 1500 об / мин. Асинхронный двигатель, который может переключать обмотки на другое число полюсов, называется многоскоростным. Его можно использовать на 2, 3, и 4 уровнях скорости.
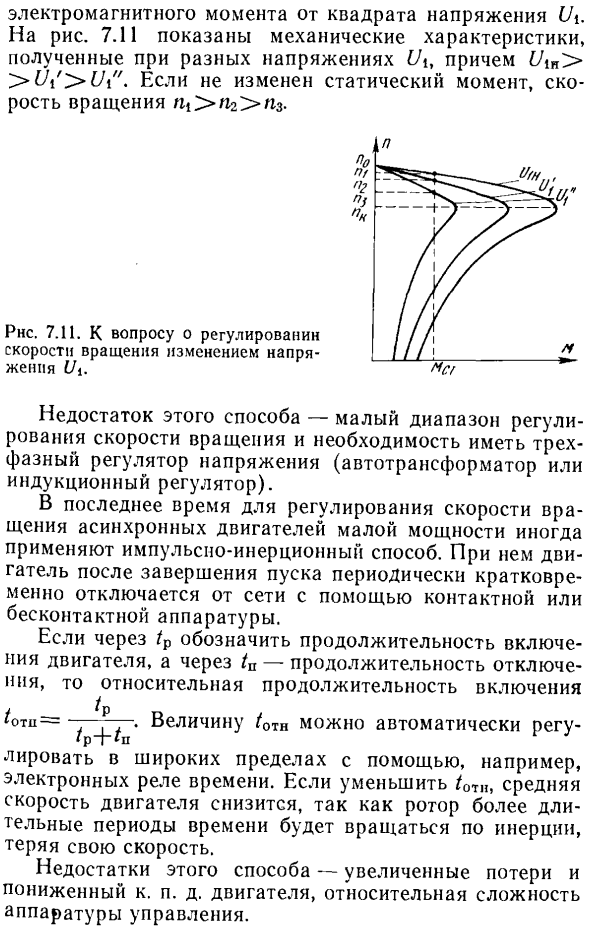
Ротор многоскоростного двигателя имеет клеточный тип. Недостатки многоскоростных двигателей: большие габариты, повышенная стоимость, сложность конструкции переключателя обмотки статора, пошаговая регулировка скорости вращения. Скорость вращения короткозамкнутого асинхронного двигателя можно регулировать путем изменения напряжения питания и*.В основе метода лежит зависимость электромагнитного момента от мощности 2-го источника (на рисунке 7.11 показаны механические свойства, полученные при различных напряжениях Vy и Vt> > 0 > 1), Если статический момент не изменяется, то скорость вращения равна u> Pn> Pi. РНС. 7.11.О проблеме регулирования скорости вращения из-за колебаний напряжения.
- Недостатками данного способа являются малый диапазон регулирования скорости и необходимость применения трехфазного регулятора напряжения-автоматического трансформатора или индукционного регулятора. В последнее время импульсно-инерционный метод иногда используется для регулирования частоты вращения маломощного асинхронного двигателя. С его помощью двигатель после запуска периодически на короткое время выключается Он отключается от сети с помощью контактного или бесконтактного устройства. если через / P указывает на продолжительность работы двигателя и через / P указывает на продолжительность остановки、 Оти/ / p + ^ n Значение / 0tn можно отрегулировать автоматически Например, его можно популяризировать с помощью электронного таймера.
Уменьшение / 0 уменьшает среднюю частоту вращения двигателя. Это связано с тем, что Ротор долго вращается по инерции и теряет скорость. В асинхронном двигателе с фазным ротором скорость вращения регулируется введением активного сопротивления настроенного реостата в цепь Ротора. Механические свойства двигателя, построенного при различных значениях активного сопротивления цепи ротора (см. рис. 7.8), показывают, что с увеличением gd при L / CT = SOP81 увеличивается и частота вращения двигателя decreases. At при этом потери энергии управляющего реостата возрастут, но это нецелесообразно.
Недостатками данного способа являются повышенные потери и снижение КПД двигателя, относительная сложность аппаратуры управления. Людмила Фирмаль
- Анализ различных методов управления скоростью вращения асинхронных двигателей показывает, что каждый из них не лишен отрицательных качеств. Асинхронные трехфазные маломощные двигатели автоматических устройств в большинстве случаев выполняют вспомогательные функции, не требующие регулирования скорости. В СССР выпускается серия трехфазных маломощных асинхронных двигателей (50-600 Вт), например AOL, AB, APN и др. Эти серии включают моторы конструированные для различных напряжений тока (127, 220 и 380 V) и синхронной скорости / t0 = 1500 n 3000 rpm.
Смотрите также:
