
Оглавление:


Распределение скоростей в движущемся твердом теле
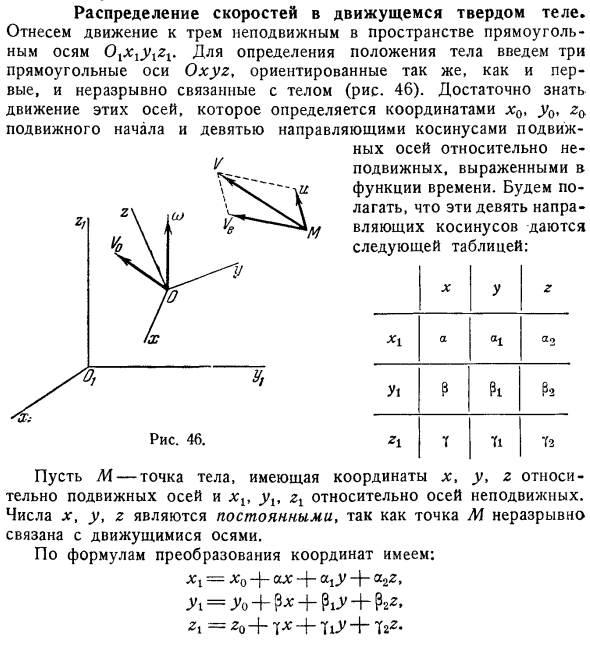
- Это движение происходит за счет 3 прямоугольных осей 01×1 y121, которые не перемещаются внутрь space. To определив положение тела, введем 3 прямоугольных дополнения, тесно связанных с телом, с той же ориентацией, что и первая ось рис.46. Достаточно знать движение этих осей. Это определяется координатами x0, y0, началом движения и 9 направляющими косинусами оси движения. Подвижность представлена как функция времени. Предположим, что эти 9 индуктивных косинусов приведены в следующей таблице.
Пусть перемещение это точка тела с координатами X, y, r относительно движущейся оси и xyy относительно неподвижной оси. Значения x, y и r постоянны, поскольку точка W тесно связана с осью движения. Согласно формуле преобразования координат, существуют: Л4 = о + + АГУ + a2g = L o + + P1.Год+ 21 = 20 + 7×4 + 722. Дифференцируя эти выражения относительно, получим проекцию скорости Y точки M на неподвижную ось рис. 46. Ох.
Болл показал, что этот коноид, имеет с цилиндром то общее свойство, что геометрическое место проекций произвольной точки на образующие есть плоская кривая. Людмила Фирмаль
Для простой интерпретации этих выражений найдите проекцию VX, Vy, Vy скорости V на движущуюся ось. Очевидно, что так оно и есть УФ выбрать AUX1 + Уге Ыы + + гг Вычислите правую часть и замените UX UYU U21 в ней формулой, полученной для них, обращая внимание на такие величины Отношение a2 p2 72 = На ноль равно е Кроме того, отношения a1a2 + Рассмотрим 1п2 4 TT2 = = 0,ао2 4 рр2 + пр О. Аа1+ 1 + P1 = 0 Я говорю о различии. Здесь обе части представлены соответственно p , r. Ух = ух З2 й. Основная формула Уу = уу + ГХ РГ, р г = г р + РХ ДХ.
- Где yx, yy и yy обозначают проекцию скорости y0 точки O Перемещение оси. Эти выражения имеют простое значение. Они показывают, что скорость V каждой точки M в трехмерном пространстве является геометрической суммой 2 векторов: вектор V0 равен скорости точки O, общей для всех точек M, параллелен, вектор u изменяется в положении точки M, rx 72 g, RG ru dx на движущейся оси. Вектор V это скорость точки U, когда тело совершает поступательное движение со скоростью V0.Вектор это скорость одной и той же точки, когда объект вращает Oo , с проекцией p, q и r на движущуюся ось. Это вращение называется мгновенным вращением.
Полученные результаты выражаются в том, что скорость любой точки на объекте является результатом скорости поступательного движения, равной скорости определенной точки о объекта и скорости вращения вокруг определенной оси через о. Полученная формула является фундаментальной для кинематики. Учитывая твердое движение, 6 сумм Y x, Yy, Y P. 7 g известная функция времени. И наоборот, если эти величины заданы как функция времени, то мы можем найти трехгранные движения. Pagloih, Ле ОПЗ де Ooshoshe, том. I, ч. Второй некоторые Н 1 8, Эо ор8 де Ntziez Stesch, стр. Увидеть, 119. Компонента скорости вдоль неподвижной оси легко выводится из результата.
Найти пространственные кривые, касательные к которым являются прямыми, относительно которых момент равен нулю. Людмила Фирмаль
Во первых, о проекции V0 на неподвижную ось ДГ, УО, Ир Си Си Си Кроме того, мы показываем проекцию мгновенного вращения Ош на неподвижную ось в rg, dg, gy и используем ротацию раздел 44, чтобы получить следующее уравнение для проекции на вектор и ось Ox1: 41 21 20 Р А У0.
Смотрите также:
Предмет теоретическая механика
| Совокупность двух вращений | Мгновенная винтовая ось. Касательное винтовое движение |
| Произвольное число вращений | Непрерывное движение |
