
Оглавление:



Расчет статически неопределимых систем по методу сил
- — Расчет статически неопределенных систем силовым методом. Мы также можем статически определить систему, которая не может быть определена статически, удалив n дополнительных связей и введя вместо этого обобщенную силу X lt X t. .X p. обобщенное смещение, соответствующее § 159] расчет статически
неопределенных систем силовым методом 347 Соответствующая сила X может быть определена как сумма двух перемещений. С одной стороны, внешняя сила, совокупность которой мы представляли бы символом Р, создает общее смещение, которое теперь
рассматривает систему только под действием дополнительных сил реакции, Людмила Фирмаль
и поэтому мы не в состоянии их создать. (/=1,2……….л.) (159.1) система (159.1). Она называется канонической. Система метода силы. Мы называем исходное отбрасывание ненужных связей статически определимой системой, производной от основной системы. Посмотрим, как определяются коэффициенты уравнения (159.1). Коэффициент SZy есть не что иное, как число перемещений, при
условии, что сила X y=1 приложена к основной системе. По правилам, установленным формулой (157,2). Необходимо определить силу и момент силы L)=1 и X^=1G, то S; y-: Х__V4zX зп/с Мг, как хорошо! Дисп / П MxiMxP-Р-2 — е р и ХГ Т «Джей Джей» З » -здесь L7gr, млр-продольной сил, изгибающего и крутящего момента, возникающих в системе под действием внешних сил. В качестве примера рассмотрим рамку, показанную на рисунке. 236 < сторона а имеет
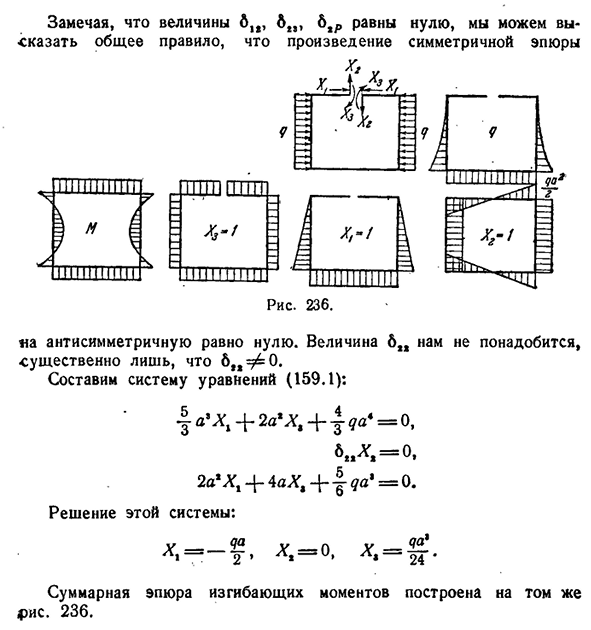
- квадратную форму. Разрежьте его вдоль оси симметрии, приложите пару продольных сил X, пару поперечных сил x t и пару моментов x t. построим график момента от нагрузкиот силы L\ = 1,от силы L2 = 1, от момента X пары,=. При применении правила для графического графика умножения: Отчет, «G1Vvl’-2z паза а-м[А2-в 1]2л+. А как
насчет TQC? а = Т3^4 ’£J В Ы я = ^Г- 2 — |- А-А=-| — АЕ L1G=Е Л Г,=0,Е Л»=4А, EJbtP=0, EJb » =2A \ 348 общая теорема прочности материала[гл. XIV Заметив, что значение 6l t равно нулю, можно сформулировать общее правило Рис, 236. «Оппозиция равна нулю.
Нам не нужно значение, необходимо только составить систему уравнений(159.1): Людмила Фирмаль
4’1+2a1a,+4? а * =о, 6. L.= 0, 2A1 4-4ahg+qa*=0. Решение этой системы: Общий график изгибающего момента построен на том же{рис. 236.
Смотрите также:
| Интеграл перемещении | Уравнение трех моментов |
| Графоаналитический способ вычислений интеграла перемещений | Жестко-пластическое тело |
