
Оглавление:

Проектирование трехфазного асинхронного двигателя
Асинхронные двигатели являются основными двигателями практически всех электроприводов промышленного предприятия. Наиболее распространены двигатели с номинальным напряжением до 660 В, а общая установленная мощность таких двигателей составляет примерно 200 млн. КВт. Массовое производство электрических машин доступно в одной серии.
Наиболее широко используются асинхронные двигатели серий 4A и 5A с выходной мощностью от 0,6 до 400 кВт, построенные со стандартной высотой вращающегося вала от 55 до 355 мм. Каждая серия включает базовый дизайн двигателя, многочисленные модификации и специальные конструкции. Главный двигатель — это двигатель общего назначения, предназначенный для нормальных условий эксплуатации. Методы расчета серий 4А и 5А и основной индикатор совпадают. Конструктивный вариант асинхронного двигателя по способу монтажа соответствует ГОСТ 2479.
Наиболее широко используется проектная группа IM2-IM4. То есть двигатель с опорой на ножке или различные типы фланцев на станине или опорный щиток. Среди маломощных двигателей — неэкранированная машина с подшипником IM5 и группа IM9. Более 1000 кВт, особенно низкоскоростные асинхронные двигатели, часто работают на выносных опорных стойках в исполнительных группах IM7 или IM8.
С точки зрения защиты окружающей среды, это наиболее характерно для двигателей малого и среднего размера с исполнением IP44 и IP54, использующих охлаждение IC0141. Двигатель средней мощности изготовлен с классом защиты IP23 и системой охлаждения IC01.
Высоковольтные высоковольтные двигатели часто имеют герметичную конструкцию со встроенными кулерами с воздушным или водяным охлаждением, например, с охлаждением согласно IC37A81.
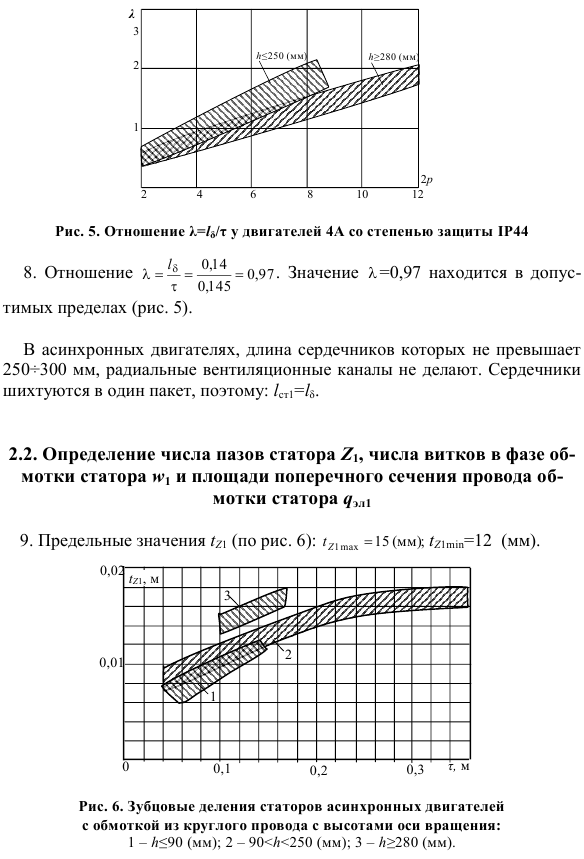
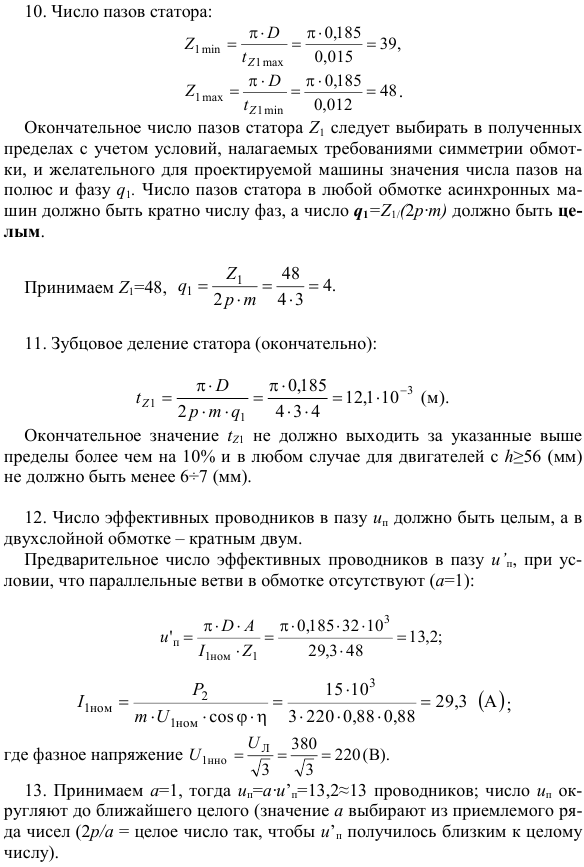
Сердечники статора и ротора всех асинхронных двигателей общего назначения заряжаются из электротехнической стали толщиной 0,5 мм. Если длина сердечника меньше 250 x 300 мм, он работает без вентиляционного канала. Для большей длины каждый сердечник делится на пакеты длиной 40х50 мм. Отдельные распорки устанавливаются между пакетами, образуя радиальные вентиляционные каналы, через которые проходит охлаждающий воздух.
Большинство машинных каналов имеют ширину 10 мм. Радиальные каналы статора и ротора расположены на противоположных сторонах друг от друга. Сердечник с 5 роторами изготовлен из той же стали, что и статор. В двигателях общего назначения с высотой вращающегося вала до 450 мм они устанавливаются непосредственно на вал и устанавливаются на гладком валу до высоты вращающегося вала до 250 мм. Для двигателей с высокой осью вращения он крепится к валу с помощью ключа. Большой сердечник ротора прикреплен к втулке или сердечнику ротора.
В большинстве асинхронных двигателей вентилятор установлен на валу ротора, а двигатель с классом защиты IP23 (внутренний корпус, класс защиты IP44 и IP54) находится снаружи корпуса и защищен корпусом. Асинхронные двигатели можно разделить на два типа: сепаратор и фазный ротор. Технология изготовления короткозамкнутого ротора намного проще, чем фазные роторы.
- Кроме того, отсутствие изоляции, контактных колец, скользящих контактов и пусковых резисторов снижает габариты и стоимость двигателя, повышает его надежность и упрощает техническое обслуживание и эксплуатацию. Поэтому большинство современных асинхронных двигателей изготавливаются с короткозамкнутыми роторами.
Одним из недостатков асинхронного двигателя с клеткой является то, что он не может увеличить пусковой крутящий момент и уменьшить ток путем включения регулируемого резистора в цепь ротора во время запуска. При проектировании двигателя с короткозамкнутым ротором выбор направленного тока ограничивает пусковой ток в 6-7 раз больше номинального значения и увеличивает пусковой момент для уменьшения смещения тока обмоточного стержня ротора. Эффект используется.
Модификации двигателя и специальные версии построены на базовой версии и имеют то же базовое структурное решение, что и основные элементы. Такие двигатели производятся в отдельных сегментах серии на определенной высоте вращающегося вала и предназначены для использования в качестве привода для механизмов, которые предъявляют особые требования к двигателю, такие как температура, окружающая среда, влажность.
Работает в условиях, отличных от нормальных. Электрические изменения в двигателях серии 4A включают двигатели с повышенным номинальным скольжением, повышенным пусковым моментом, многоскоростным режимом и выходной частотой 60 Гц из-за конструктивных изменений. iyam-мотор с фазным ротором со встроенным электромагнитным тормозом, низким уровнем шума, встроенной температурной защитой и многим другим.
Различные модифицированные и специально разработанные двигатели имеют то же имя, что и основной, но с дополнительной буквой после серии или после числа, указывающего количество полюсов. Примеры изменения спецификации и специального дизайна.
Примеры решения, формулы и курсовая
| Решение задач | Лекции |
| Расчёт найти определения | Учебник методические указания |
Стандартные условия для обучения и проектирования асинхронного двигателя включают в себя номинальные данные проектируемой машины и инструкции по ее режиму работы, производительности в зависимости от степени защиты от воздействий окружающей среды и системам охлаждения.
Исходные условия определяются в соответствии с индивидуальными проектными заданиями в приведенной ниже форме. При проектировании необходимо учитывать следующие моменты:
- 1. Необходимо выбрать базовый двигатель серии А4, который наилучшим образом соответствует начальным проектным данным, таким как номинальная выходная мощность вала (P2), количество полюсов (2p) и номинальное линейное напряжение (U1). ) Частота питающей сети (f1 = 50 Гц).
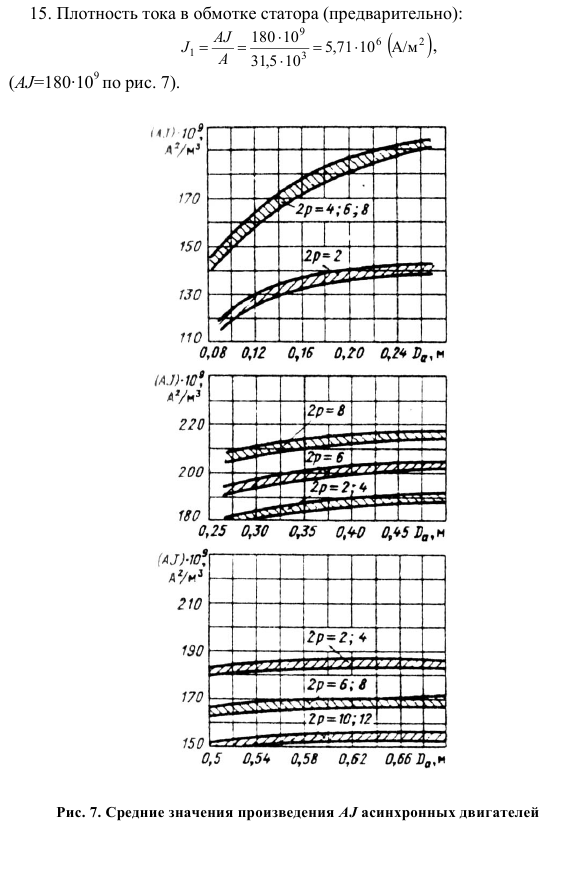
- 2. Нормализованные показатели, такие как — КПД КПД — Коэффициент мощности cosφН — Максимальный крутящий момент MK / MN, — Начальный пусковой крутящий момент MP / MN, — Начальный пусковой ток IP / IN, — Индуктивность воздушного зазора Вδ, — Линейная нагрузка A (A / m) -Плотность тока J должна быть на уровне выбранного базового двигателя серии A4.
- 3. В процессе расчета всегда необходимо сравнивать приобретенные характеристики с характеристиками базового двигателя.
- 4. Расчетные данные должны быть в пределах 10% от базовой производительности двигателя.
В учебном пособии есть два варианта расчета асинхронных двигателей.
Первый вариант расчета — это так называемый «ручной метод». Описано в главе 1 и главе 2. Этот метод выполняет все расчеты вручную. Второй метод, описанный теперь более прогрессивный.
В этом методе вы используете компьютерную математическую систему Mathcad для создания программы в среде для вычисления асинхронных двигателей. Согласно исходным данным, асинхронные двигатели с короткозамкнутым ротором серии 4A должны быть спроектированы с расчетом IM1001, метод защиты IP44, метод охлаждения IC0141, климатический дизайн и категория размещения U3, класс сопротивления изоляции F.
Все варианты конструкции обмотки статора подключены по схеме «звезда», а частота питающего напряжения составляет 50 Гц.
Задание: необходимо спроектировать асинхронный трехфазный электродвигатель (m=4) с короткозамкнутым ротором: P2=195 (кВт), UЛ=380 (В), f1=70Гц, 2p=6; конструктивное исполнение IM1001; исполнение по способу защиты IP35; способ охлаждения ICO546; климатическое исполнение и категория размещения У3, класс нагревостойкости изоляции F.
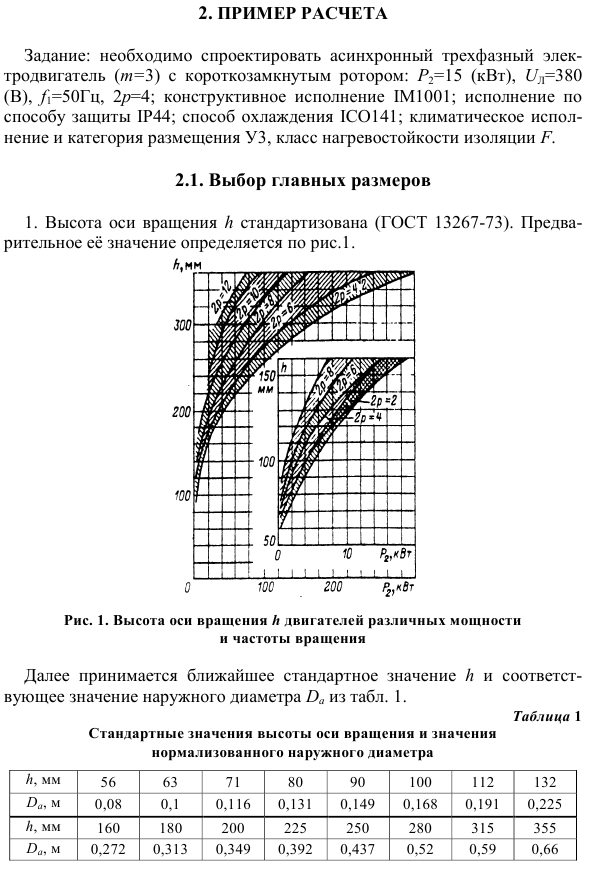
| Ну мм | 56 | 63 | 71 | 80 | 90 | 100 | 112 | 132 |
| А», м | 0,08 | 0,1 | 0,116 | 0,131 | 0,149 | 0,168 | 0,191 | 0,225 |
| Ну мм | 160 | 180 | 200 | 225 | 250 | 280 | 315 | 355 |
| А», м | 0,272 | 0,313 | 0,349 | 0,392 | 0,437 | 0,52 | 0,59 | 0,66 |
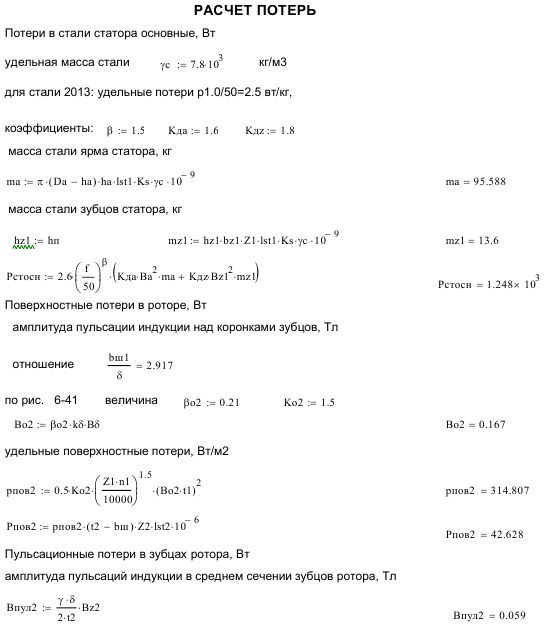
Дополнительные потери при нагрузке асинхронного двигателя возникают из-за влияния рассеянного магнитного потока, индуцированных пульсаций в воздушном зазоре, наклона кривой распределения MDS обмоток статора и ротора и многих других причин. Кроме того, клеточный ротор вызывает потери из-за поперечного тока.
Ток между стержнями замыкает сердечник ротора. Эти токи особенно заметны в диагональных канавках ротора. Для таких двигателей, как показывает опыт эксплуатации, дополнительные потери под нагрузкой могут быть достигнуты от входной мощности (и, возможно, больше).
ГОСТ устанавливает средние расчетные дополнительные потери при номинальной нагрузке, равные номинальной мощности. При расчете потерь и КПД двигателя в не номинальных режимах дополнительные значения потерь пересчитываются пропорционально квадрату тока.
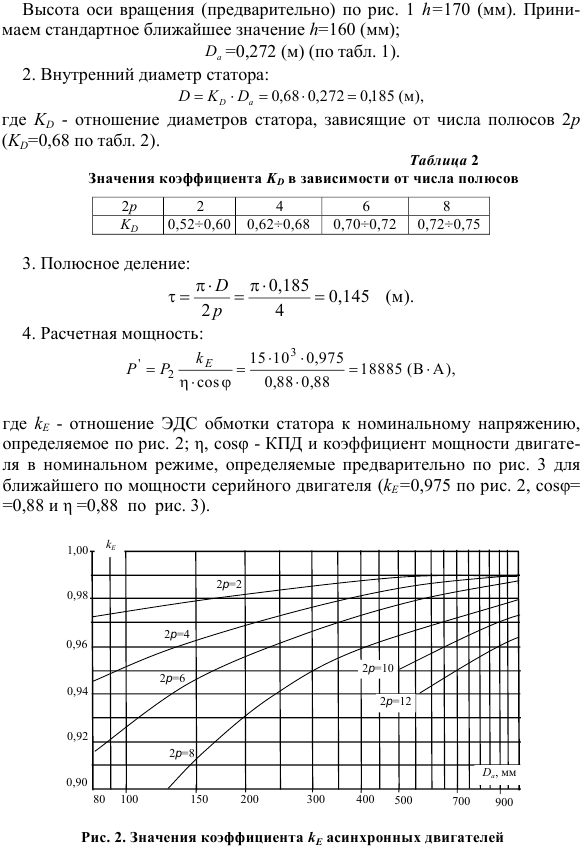
Значения коэффициента К» в зависимости от числа полюсов
| 2 р | 2 | 4 | 6 | 8 |
| Ко | 0,52+0,60 | 0,62-0,68 | 0,70-0,72 | 0,72-0,75 |
Этот пример включает в себя два варианта расчета асинхронных двигателей с различными базовыми начальными характеристиками. Пояснительные примечания не включают параметры разработки, пути «тупика» и неправильно выбранные параметры. Это означает, что если вам нужно отрегулировать характеристики двигателя во время расчета (это происходит почти во всех случаях), это не входит в заключительную заметку.
Завершенное описание содержит только один полный расчет, который заканчивается правильным результатом. Спецификация выражения не расшифрована. Обратитесь к руководству. Данные организованы в таблицу для точности. В таблице показаны все числа, замененные формулой и результатом (два необязательных числа из двух строк). При округлении, как правило, оставляют значащие цифры. Если значение является размером, округлите до десятой доли миллиметра.
Цель курсового проекта, а именно приобретение базовой технологии и разработка трехфазного асинхронного двигателя с короткозамкнутым ротором, была достигнута в принципе. Обратите внимание, что расхождения минимальны, но возникают в результате грубых оценок, таких как электромагнитные нагрузки, поэтому следы остаются в расчетных данных.
