
Оглавление:


Приведение уравнений движения к наименьшему числу
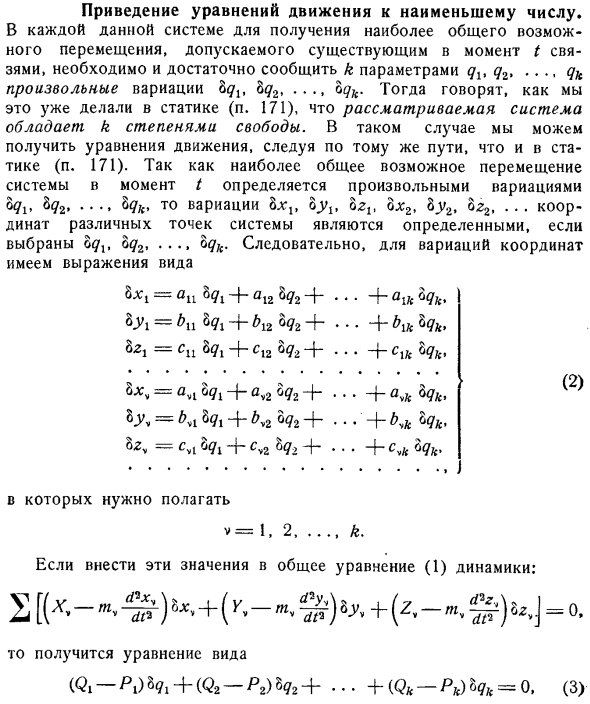
- Учитывая параметр qv q2, для каждой системы получить максимально общее возможное смещение, которое допускает муфта, присутствующая в данный момент времени t… любая вариация qk, bqit bq2. Необходимо и достаточно уведомить k о oqk. Тогда они говорят, как мы Это уже сделано в статике пункт 171, что степень свободы рассматриваемой системы равна k. В этом случае вы можете получить уравнение движения, следуя по тому же пути, что и статика пункт 171. Наиболее распространенным возможным смещением системы во времени t является любое изменение fyi, 8 2,… изменение координат различных точек системы определяется BQK 8xp 8ur ozpzp 6×2, b2, 8,… p 8 2,…oqk.
Примем это положение за особое положение, в котором П равно нулю. С другой стороны, так как пластинка в этом положении неподвижна, то ее полная энергия будет также равна нулю. Людмила Фирмаль
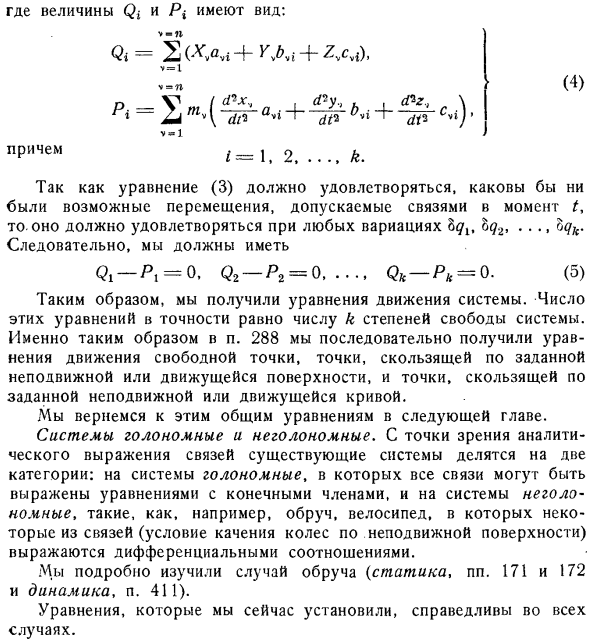
В вариации координат имеется выражение следующего вида: Ан + А12 с 2 + + АЛК fyk и Y1 = БН 8х + 12 + + Бик дь ftzj = СN AQT по + С12 bq2… c от bqk ЗХ,= Авл G91 относительные + ав2 Сг2 + … Аль iqk = З ВЛ 8, + oq2 ву2. 4 бык дь, 8 4 cv2 4. 4 cvk 6qk, Дж. Вы должны предположить v = 1, 2,…к Если добавить эти значения в общую формулу динамики 1 Тогда вы получите уравнение вида Ци а + + 2р пр за 2 + 4 г ПК bqk = 0, 3 где количество Ци и В дальнейшем Ци 2 АИ + А ви V = 1 = Р Z = 1, 2.к. 4 Уравнение 3 должно удовлетворять любому смещению, допускаемому ограничением в момент времени t, поэтому оно равно a , bq2… Это должно быть выполнено для каждого изменения в Zqk.
- Поэтому мы должны иметь Р1 = = 0, В2 Р2 = 0. Дь РЛ =0. 5. Таким образом, система приобрела уравнение движения. Число этих уравнений будет точно равно числу степеней свободы k в уравнении system. As такие, No. In 288, мы последовательно получили уравнения движения свободных точек, точек, которые движутся вдоль определенной неподвижной или движущейся поверхности, и точек, которые движутся вдоль определенной неподвижной или движущейся кривой. Вернемся к этим общим уравнениям в следующей главе.
Эта энергия может быть использована для получения внешней работы путем приведения маятника обратно в его положение равновесия, в котором его скорость в самом начале была равна нулю. Людмила Фирмаль
Голономные и неголономные в системе. С точки зрения аналитического выражения отношения существующая система является голономной системой, в которой все связи могут быть представлены уравнениями с конечными членами, а некоторые связи состояние катящихся колес на неподвижной плоскости представлены дифференциальными отношениями. Мы подробно рассмотрели случаи применения обруча статины, пункты 171 и 172, динамика, пункт 411.
Смотрите также:
Теоретическая механика — задачи с решением и примерами
| Случай системы со связями | Голономные системы; координаты голономной системы |
| Общее уравнение динамики для системы со связями без трения | Метод множителей Лагранжа для голономной системы |
Если вам потребуется заказать теоретическую механику вы всегда можете написать мне в whatsapp.
