
Оглавление:


Приведение произвольной системы сил к силе и паре сил
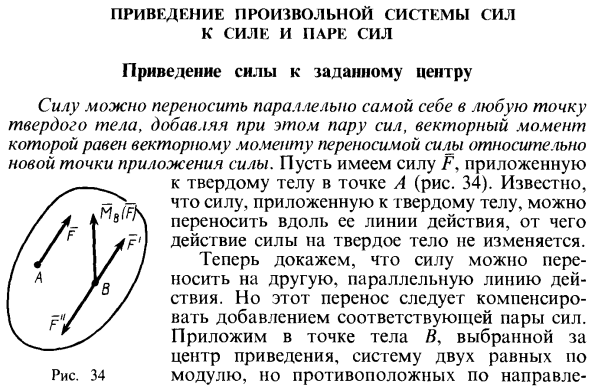
- Принесите силу в данное сердце. Сила может распространяться в любую точку твердого тела параллельно самой себе, но векторный момент добавляет пару сил, равных векторному моменту передаваемой силы относительно новой точки приложения силы. Предположим, что сила F приложена к твердому телу в точке а рис.34. Известно, что сила, приложенная к твердому телу, может передаваться по его линии действия, от которой действие силы на твердое тело остается неизменным. Здесь мы доказываем, что сила может быть передана на другую параллельную линию действия. Но этот ход нужно компенсировать добавлением мощности соответствующей pair.
К точке выбранного тела B в качестве центра редукции применяют 2 системы, которые равны по величине, но противоположны по направлению. Силы F и F параллельны данной силе F. силы F и F составляют систему сил, равную нулю и могут быть добавлены к любой системе сил. Он модульный. Ф = Ф = Ф. И затем… Ф ОО ф, ф, ф в ф, ф, ф. 2 системы, где Magnitude равно и направление параллельных сил F, F противоположно, являются парами сил, называемых парами добавленных сил. Поэтому вместо силы F, приложенной к точке A, величина и направление равны, но сила F , приложенная к точке B, получается, и векторным моментом является M F, F, F пара добавленных сил F, F = MB F.
Общим случаем дисбаланса можно считать наложение статического и динамического дисбаланса, когда центр тяжести находится не на оси вращения, а на этой оси отсутствуют точки в качестве главной оси инерции. Людмила Фирмаль
Процесс замены силы F силой F и парой сил F, F называется приведением силы F к заданному центру B. теорема эквивалентности пары сил позволяет заменить пару F, F другими парами сил с тем же векторным моментом. Сделайте систему произвольных сил парой сила сила Докажем главную теорему статики теорему Пуансо: любая система сил, действующих на твердое тело, в общем случае может быть сведена к паре сила сила. Процесс замены такой системы сил на 1 силу и 1 силу называется приведением системы сил к определенному центру. Дадим систему любой силы Flt F2, F Он прикреплен к твердому телу.
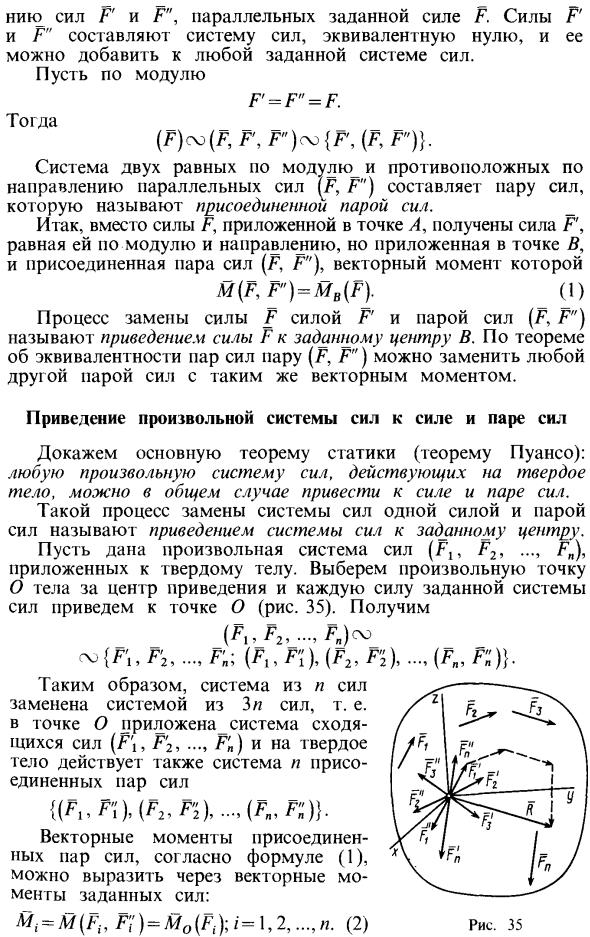
Выделите каждую силу в системе любой точки О тела за пределами центра торможения и заданную силу, которую она подводит к точке О рис.35.Возьми ФЛ, Ф2,…, Ф Х Х ф т е 2.Ф, Ф, Ф, Ф2, Ф 2,…. Ф, Ф:. Таким образом, система из n сил заменяется системой из 3 N сил. То есть в точке 0 применяется система сходящихся сил F1, Fi,…ФН, системы N функций власти сплошные… если., г Согласно формуле 1, векторный момент добавленной пары сил может быть представлен векторным моментом заданной силы. H = A Р, А = А 0 Т Я = 1,2,…у. С. 2 Система сходящихся сил F , F2,…Результат тот же, что и результат.
Это сила F t, P2…Вектор F N геометрически представлен конечным вектором строящегося силового многоугольника, равным сумме. Эти силы рис. 35. Так… А, Ф1… Fn, Fn v , здесь = + + + + … + Ф = интернет + Ф2… + ФН = Ф Фут Система сходящихся сил F , F2,… Гашение R является результирующей силой, и в системе определенной силы Fl F2, F сила R является только этим вектором. Общий, или основной вектор. Главным вектором системы сил называется вектор, который равен векторной сумме этих сил.
То есть вектор, который закрывает силовой полигон, построенный поверх силы 3 Система парных сил, объединенных Fi, F , F2, F2, .., F , FJ, нет теоремы о сложении пары сил, замене пары сил парой сил Ф, Ф. Векторный момент A , = o, это называется главным моментом. Главный момент Lo равен сумме векторных моментов Связной пары. Ло = МО Центр + МО Ф2 + … + М0 Ф = МО Ф. 4 показатель степени O означает, что точка O является центром deceleration. So, главным моментом системы сил относительно точки о объекта является сумма векторных моментов всех сил системы относительно этой точки.
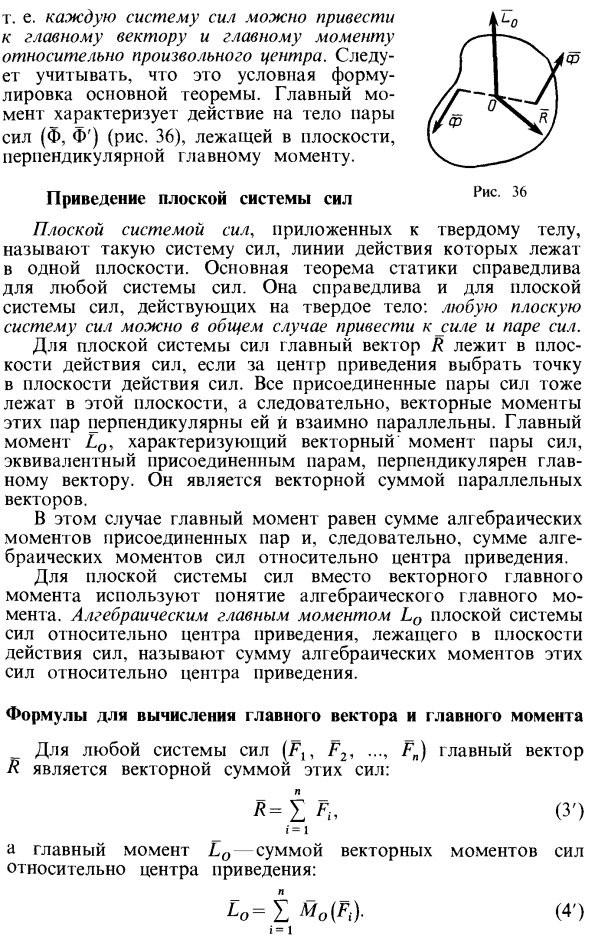
- Основным моментом системы сил является вектор замыкания вектора, образованный добавлением векторного момента силы системы против выбранного центра. Таким образом, доказывается основная теорема статики: система сил, действующих на твердое тело, становится парой сил, равных основному вектору системы сил, и векторным моментом, равным основному моменту системы сил. В краткой форме эта теорема может быть выражена как: Ф, Ф2…. Ф, О. То есть каждая система сил может быть сведена в главный вектор и главный момент относительно любого центра. Заметим, что это условное утверждение основной теоремы.
Главный момент характеризует действие 1 набора сил Ф, Ф рис.36 на плоскости, перпендикулярной основному моменту. Рисунок 36 приведение системы плоских сил Я называю силу плоской системой приложенной к твердому телу Система сил, в которой линии действия расположены на одной плоскости. Основная теорема статики применима к любой системе forces. It эффективен также для плоских систем сил, действующих на твердые тела. Система силовых плоскостей обычно может быть сведена к паре сила сила. Для системы силовых плоскостей, если в качестве центра редукции выбрана точка в плоскости действия силы, то основной вектор R находится в плоскости действия силы.
С течением времени, теоретически установленного, в реальности роста амплитуды в соответствии с линейным законом не наблюдается, но амплитуда резонанса значительно больше, чем при отсутствии резонанса. Людмила Фирмаль
Векторные моменты этих пар перпендикулярны ей и параллельны друг другу, так как все связанные пары сил также находятся в этой плоскости. Главный момент Lo, характеризующий векторный момент мощности пары, эквивалентной связанной паре, перпендикулярен основному вектору. Это векторная сумма параллельных векторов. В этом случае главный момент равен сумме алгебраических моментов добавленной пары, а следовательно, и сумме алгебраических моментов сил относительно центра редукции. В случае плоской системы сил вместо векторного первичного момента используется понятие алгебраического первичного момента.
Алгебраический главный момент Lo системы силовых плоскостей относительно центров редукции на рабочей поверхности силы является суммой алгебраических моментов этих сил относительно центров редукции. Главный вектор и Формула главного момента Система любой мощности, Р2,…, Главный вектор R это векторная сумма этих сил. И А главный момент Эо это сумма векторных моментов сил относительно центра торможения. Е0 = л 0 РД 4 Главный вектор a геометрически изображается в виде замкнутого силового многоугольника, построенного с заданной силой.
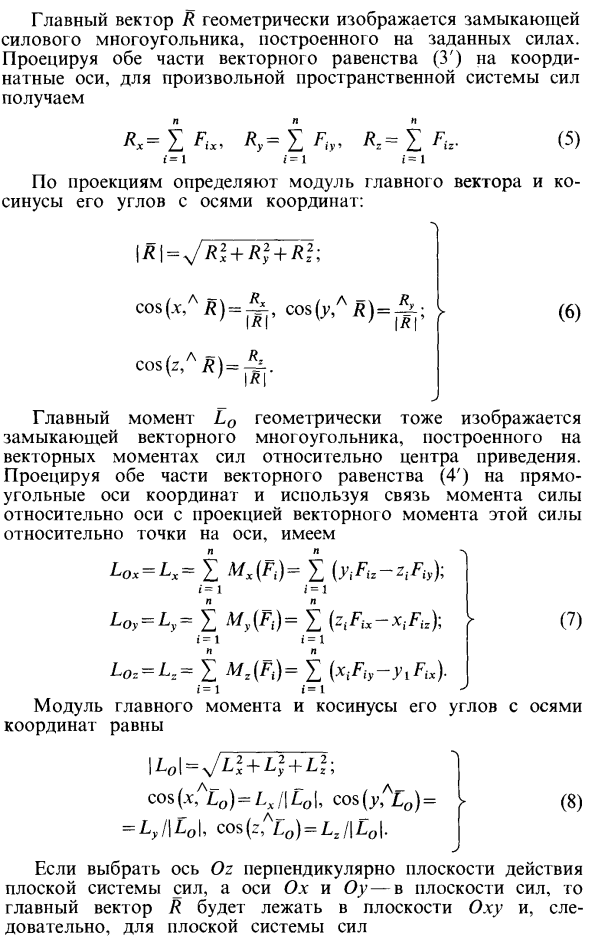
Для любой пространственной системы сил, которую мы получаем, мы проецируем обе стороны векторного уравнения 3 на координатные оси = 5, исправить Проекция определяет Косинус модуля основного вектора и его угол к координатным осям. 6 Главный момент Lo также геометрически рисуется замкнутым векторным многоугольником, построенным на векторном моменте силы относительно центра торможения. Обе части векторного уравнения 4 проецируются на декартову ось, используя соотношение между моментом силы относительно оси и проекцией этого момента вектора силы относительно точки на оси.
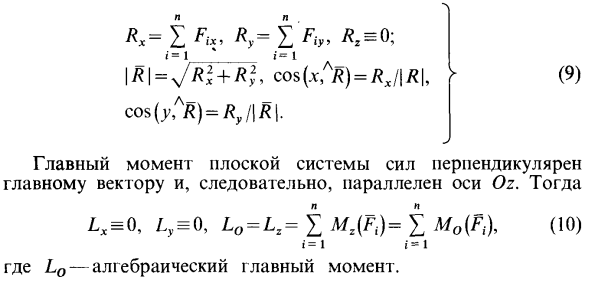
Модуль основного момента и косинус его угла 7 С валом Корректировка это равенство 1 Ь + Лы + ЛТ потому что Х, aL0 = LХ 0, потому что г, а о = я 8 = Лы Ор, потому что з Ор = ЛЗ Ор. Ось Oz перпендикулярна плоскости действия плоской системы сил, а оси Ox и Oy в плоскости силы выбраны, главный вектор R находится в плоскости Oxu, и поэтому, в случае плоской системы сил, Оси Ox и Oy в плоскости силы. ГХ =исправить, Ф = Р= 0 Р = г РЛ + Р, что Х р = ГХ Р, потому что г р = ры Р. 9 Главный момент плоской системы сил перпендикулярен основному вектору, а следовательно, параллелен оси Oz. И затем…
Смотрите также:
Теоретическая механика — задачи с решением и примерами
| Сложение пар сил | Приведение силы к заданному центру |
| Условия равновесия пар сил | Приведение произвольной системы сил к силе и паре сил |
Если вам потребуется заказать теоретическую механику вы всегда можете написать мне в whatsapp.
