
Оглавление:



Принцип Даламбера для системы материальных точек
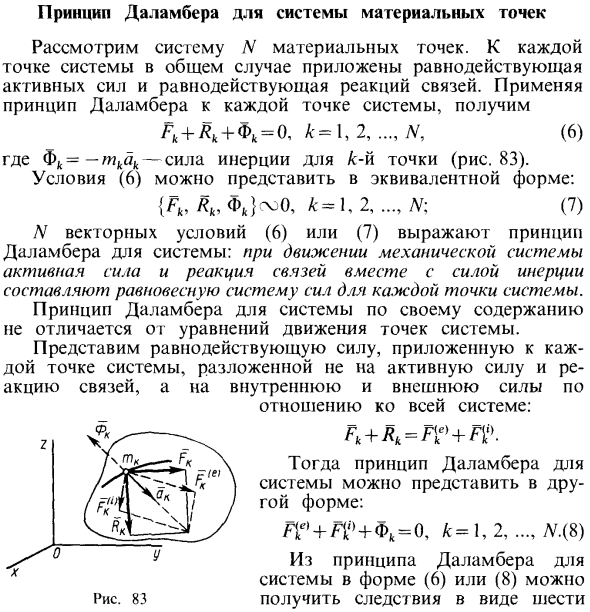
- Рассмотрим систему важных моментов. В общем, результаты активных сил и результаты реакций связывания применяются к каждой точке системы. Применяя принцип Даламбера к каждой точке системы: Ti + ^ + Φ ^ 0, * = 1, 2, …, N, (6) Где = -tkak-k точка силы инерции (рис. 83). Условие (6) может быть выражено в эквивалентном формате. Rk, Ф *} оо, * = 1,2, …, N; (7) N-векторное условие (6) или (7) представляет принцип Даламбера системы. По мере движения механической системы активные силы, объединенные реакции и силы инерции образуют систему баланса сил в каждой точке системы.
Принцип Даламбера системы по своему содержанию ничем не отличается от уравнения движения точки системы. Представьте себе, что результирующая сила, приложенная к каждой точке в системе, подразделяется на внутренние и внешние силы по всей системе, а не на активные силы и реакцию сцепления. Fk + Rk = Fj? + Fp. Принцип системы Даламбера затем может быть выражен в другой форме. ^ ‘+ Оо + Φ11 = 0, k = 1, 2, …, LG. (8) Из принципа Даламбера системы вида (6) или (8) Рисунок 83 Получить 6 результатов «О Условия равновесия сил, действующих на системные точки, и сил инерции.
Таким образом, диссипативная сила увеличивает устойчивость движения под действием консервативной силы, разрушая устойчивость, если она достигается добавлением силы гироскопа. Людмила Фирмаль
Суммируя левую часть (6) во всех точках системы, E E D> + ZФ * = о. (9) Умножим каждое соотношение (6) слева на радиус-вектор точки rk и снова суммируем точки системы: к. ft xA) + ((rxЛ,) + ((f, xφ) = 0 или 1 M0 (Fk) + M M0 (Rk) + Л? 0 (Φk) = 0 (10) Следствие принципа Даламбера (10) справедливо как для стационарных, так и для движущихся точек в инерциальной системе отсчета системы, поскольку начало вектора радиуса gk можно выбрать в любой точке. Условия (9) и (10) дают шесть условий равновесия, которые аналогичны условиям равновесия сил, приложенных к телу в статике, когда они представлены проекцией на оси координат.
Используя принцип Даламбера в форме (8), результат получается в следующем виде: ED ´ + EF ^ O; (11) Мо Мо (F?) + Яо (Φ *) — 0, (12) Поскольку внутренняя сила системы благодаря этим силовым характеристикам удовлетворяет условиям Diao; я? o (A °) = o. Если (11) и (12) спроецировать на оси координат, шесть равновесных силовых состояний могут быть получены снова. Характерной чертой баланса сил в виде (11) и (12) является отсутствие в них внутренних сил, что особенно полезно для решения многих задач системной динамики. Фактически условие (11) является изменением теоремы об импульсе, а (12) является следующей теоремой. Изменение системного момента движения (если представлено в форме) Dp » -‘in-O; II G | Дм «м-» = о. В).
Примеры решения, формулы и задачи
| Решение задач | Лекции |
| Расчёт найти определения | Учебник методические указания |
- Сравнение (11) с (1G) и (12) с (12 ‘) дает уравнения, которые вычисляют главный вектор системы и момент инерции относительно импульса и импульса. «• — (13) (, 4> В точке (12 ‘) точка О неподвижна в выбранной инерциальной системе отсчета. Поэтому, используя уравнение (14), главный момент инерции можно рассчитать только для неподвижной точки O. Для движущейся точки вместо (12 ‘) нам нужно использовать ранее доказанную теорему для изменения момента движения движущейся точки A-. T, I, + «D». (12 ‘) После замены точки O в A в (12) и сравнения с (12 «) получите формулу для расчета основного момента инерции для точки перемещения A. £ (Φ> = — ^ L + Mvcxva = ~ + vAx Mvc ^. (14 ‘).
В уравнении (14 ‘) vA и vc являются скоростями точки A и центра тяжести C соответственно относительно рассматриваемой инерциальной системы координат. М — масса системы. Q — Mvc, поэтому основным вектором инерции является Ф = £ Фк = — ^ = -Л / ас. (15) Где M — масса системы, а vc и ac — скорость и ускорение в центре масс, соответственно. Для этих твердых движений, если сила инерции уменьшается до результата, последний будет иметь абсолютное значение и направление, которое соответствует главному вектору этих сил. Однако результат инерции не обязательно проходит через центр тяжести тела, но его модуль и направление всегда определяются уравнением (15).
Однако первоначально он использовался только для рассмотрения свободных материальных точек и свободного твердого движения до тех пор, пока не были сформулированы аксиомы связи. Людмила Фирмаль
Когда вектор из (14) проецируется на ось Oz, он становится следующим. < «■> Аналогичные выражения могут быть получены для других осей. Как известно, в случае вращения твердого тела вокруг неподвижной оси Oz, Ks = Jzw. Подставляя это значение K в (14 «) Фφ> = Л / / ((Φk) = -Ле. (16) Уравнение (16) вычисляет момент инерции относительно оси вращения при вращательном движении твердого тела вокруг неподвижной оси. Этот момент создается тангенциальной силой инерции. Это потому, что моменты не создаются, потому что нормальная сила инерции в каждой точке тела пересекает ось вращения. Другой результат исходит из принципа системы Дарлемберта — теоремы об изменении кинетической энергии.
Чтобы сделать это, умножьте скаляр в (8) на drk и суммируйте полученное соотношение во всех отношениях. получить £ Fle) -drk + £ LMG * + £ Fkbg * = 0, Или в других спецификациях <17 ’ Сравните (17) с теоремой об изменении кинетической энергии дифференциальных систем. E / ‘<„, + HdLre-LT-O, Получим формулу суммы основной работы сил инерции за счет кинетической энергии системы Т. drk = £ fd ^ = -dT. (18) Получить интеграл (18) £ g = — (r-m0). (19) Следовательно, суммарная работа силы инерции для любого смещения в системе равна изменению кинетической энергии при этом смещении и получается с противоположным знаком. Метод решения задач динамики с использованием силы инерции называется кинетостатическим.
Смотрите также:
Задачи по теоретической механике
| Принцип Даламбера | Силы инерции твердого тела в частных случаях его движения |
| Принцип Даламбера для материальной точки | Динамические реакции при вращении твердого тела вокруг неподвижной оси |
