
Оглавление:


Применение начала возможных перемещений к упругим системам
- Применить начало возможного хода К упругой системе Происхождение возможных перемещений является общим принципом механики, который имеет большое значение для теории упругих систем. Согласно этому принципу, его можно сформулировать следующим образом: если система находится в равновесии под действием приложенной нагрузки, то ЭВМА можно использовать в качестве индикатора точки системы. (13.23) Где-
внешняя сила;-возможное движение этих сил;»ZPt&tfn-работа внешних сил; Witn-работа внутренних сил. Следует отметить, что в процессе изготовления системы она не изменяется, чтобы позволить движение размеров и направления внешних и внутренних сил. Поэтому при расчете работы не следует брать половину произведения соответствующей силы и смещения и максимум. Учитывая малость деформации и линейную зависимость от нагрузки, упругое смещение, которое вызвано любым видом нагрузки и происходит без разрыва связи, воздействие внешних
и внутренних сил на возможное смещение, называется возможной или Людмила Фирмаль
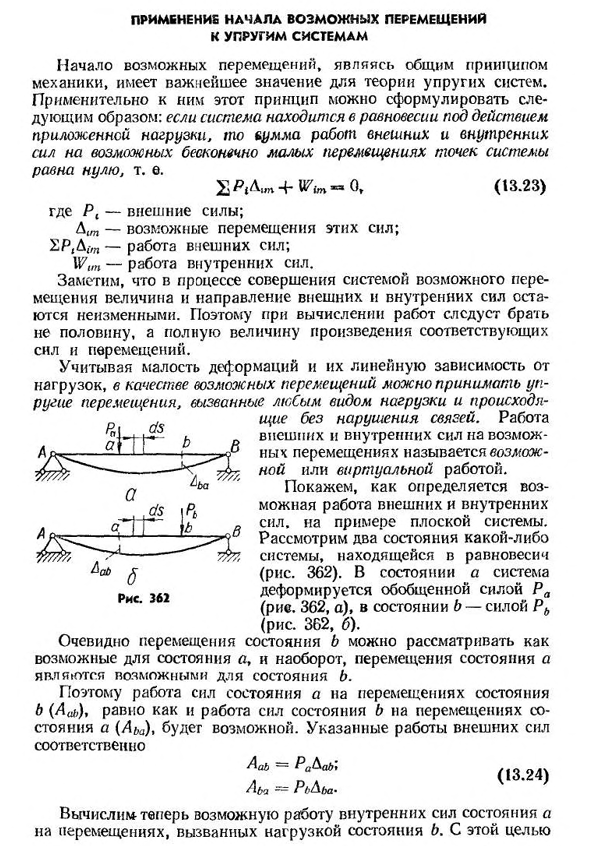
виртуальной работой. Рис триста шестьдесят два В данной работе показано, как на примере планарных систем определяются возможные режимы работы внешних и внутренних сил. Рассмотрим два состояния системы в равновесии. 362). В состоянии а система преобразуется обобщенной силой RA(рис. 362, а), в силу Р (рис. 362, б). Очевидно, что смещение государства в можно рассматривать в максимально возможной степени для государства а, и наоборот, смещение государства а возможно для государства В. Таким образом,
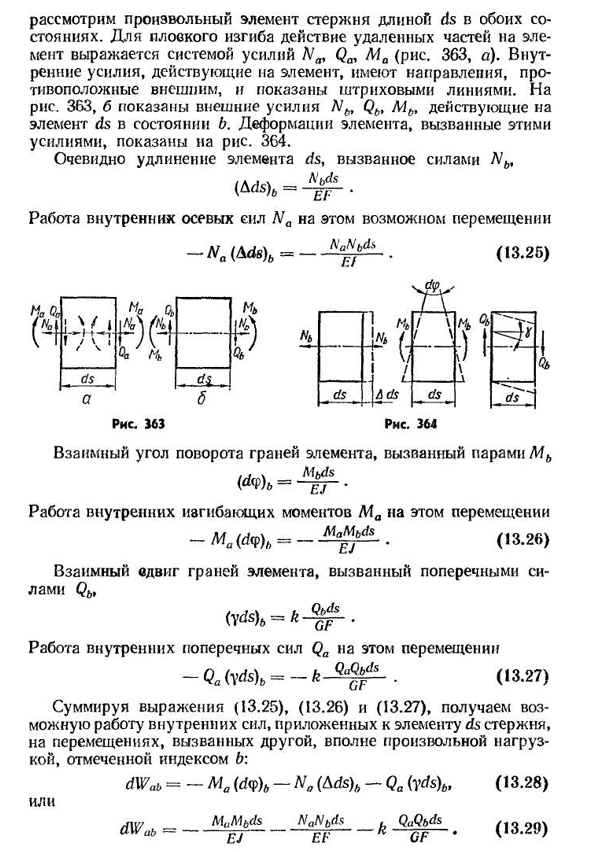
рабочая сила государства и движущегося государства S (AAI), а также рабочая сила государства и государства b на движущемся государстве и (AIA). Это возможно. Каждая из этих внешних сил Аба-Р баба* (13.24) Теперь вычислим возможное поведение внутренних сил состояния а на смещение, вызванное нагрузкой состояния В. 368 рассмотрим любой стержневой элемент длины ds в обоих состояниях. При плоском изгибе действие удаляемой детали на элементы
- осуществляется силой Na, Qa, Mq(рис. 363, а). Внутренняя сила, действующая на элемент, имеет противоположное внешнему направление и обозначается пунктирной линией. Для риса. Деформация элементов, вызванная этими силами, показана на рисунке. 364. Очевидно, что удлинение элемента ds, вызванное силой Nb, является работой внутренней осевой силы L; и к этому возможному смещению-Na (Ade) h=—(13.25) На N БДС е л Взаимный угол поворота плоскости элемента, вызванный M-парой Mbds EJ Внутренний изгибающий момент этого смещения ma работает m a t= — ^1. (13.26)взаимный сдвиг поверхности элемента боковой силой Qb, < м) б=к Дь< & ГФ Работа внутренней поперечной силы Qa на это перемещение равна Qa (yds) b= -. (13.27)формулы(13.25),
(13.26)и(13.27)складывают индекс B: dWab=~M o(d _ ^ б±_ _ к у М. (13.29)) Основную работу J69просумировав в стержне, и все стержни системы получают полную величину возможной работы внутренних сил: 2J(Ads) 6+2j mA(dy)b-| — 2J<2, (yds) b]. (13.30) Один. С $ Дж Давайте напишем в более удобной форме: (13.31) В Формулу(13.23)введена формула для возможного манипулирования внешними силами|первая из формул(13.24)1 и внутренними силами(формула(13.30)или(13.31) 1,мы имеем формулу для упругой стержневой системы плоскости.: (13.33) Другими словами, если упругая система находится в равновесии, то выражения(13.32)и(13.33) возможности, вызванной другой очень произвольной нагрузкой, отмеченной индексом B,
также могут быть применены к стержням малой кривизны. Подобные Людмила Фирмаль
выражения легче сделать в целом, если они поставляются с бактериородопсином. Если принять фактическое смещение, вызванное заданной нагрузкой RA да как можно больше, то уравнение (13.33) примет вид Разделив выражение (13.34) на два, легко увидеть, что мы получаем (13.35 утра)) То есть А представляет собой действительную работу внешних сил в процессе статической деформации 1 см. Уравнение (13.11) 1, a — Работа внутренних сил(см. уравнение (13.19) 1. = Ш(13.36 утра)) 370 путь, L+ » 7 = 0, (13.37) То есть суммарная работа внешних и внутренних сил при статическом деформировании упругой системы равна нулю. Действительная величина работы внешних и внутренних сил будет равна величине знака и наоборот.
Смотрите также:
| Работа внешних сил | Теоремы о взаимности работ и перемещений |
| Работа внутренних сил | Общая формула для определения перемещений. метод мора |
