
Оглавление:


Приложения. Тяжелые системы
- Если система, в которой определяется положение равновесия, находится только под действием силы тяжести, которая является силой, приложенной непосредственно, то, очевидно, существует функция силы приложенной силы directly. In факт, предполагая, что ось Oz вертикально вниз, вы получаете возможное задание, равное niigbzi для точек mit с весами m g. So мы получаем g mibzi = gM 85 для общего количества возможных заданий. Где h ордината центра gravity. В этом случае положение равновесия будет равно нулю.
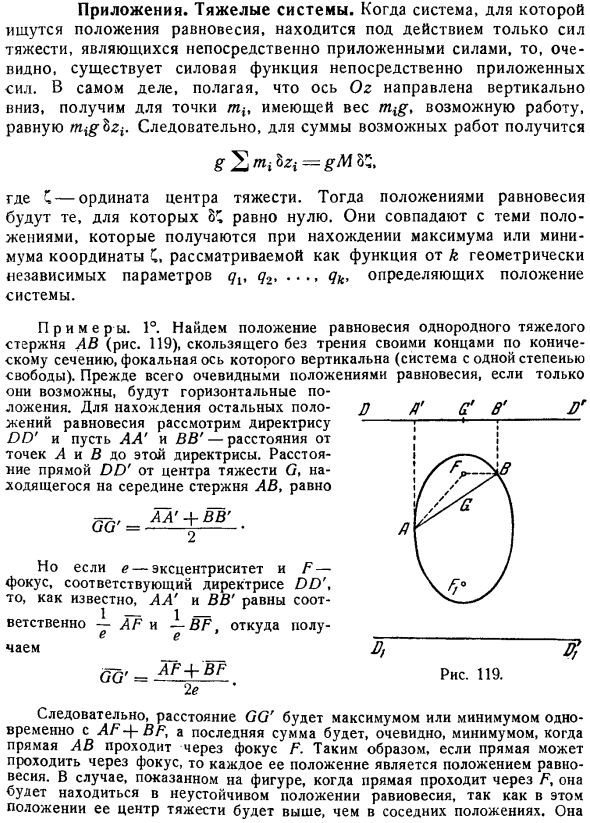
Это геометрически независимые K параметров qit q2, которые определяют положение системы, совпадающее с положением, которое необходимо принять при нахождении максимального или минимального значения координат C… рассматривается функция qk. Образцы. 1.Найти положение равновесия однородного тяжелого стержня АВ рис. 119 и скользить без трения вдоль конического сечения система с 1 степенью свободы, конец которого перпендикулярен фокальной оси. Прежде всего, если это возможно, очевидным положением равновесия является горизонтальное position. To найдите оставшееся положение равновесия, рассмотрите directrix DD и пусть AA и BB расстояние от точек A и B до этого directrix.
Построение замкнутого веревочного многоугольника, соответствующего системе лежащих в плоскости уравновешивающихся сил. Людмила Фирмаль
Расстояние линии DD от центроида G, расположенного в середине стержня AB, равно AA + BB Два Гг Ф DD Однако, если e эксцентриситет и фокус, соответствующие расслоению, то, как хорошо известно, AA и BB равны 1 AF и BF. Гг = Второй Таким образом, расстояние GG максимизируется или минимизируется одновременно с AF BF, и последний итог, очевидно, минимизируется, когда линия AB проходит через фокус F. следовательно, если линия может пройти через фокус, то ее положение является положением, respectively. Equilibrium. As как показано на рисунке, когда линия проходит через F, она становится неустойчивым равновесием position. In в этом положении центр тяжести будет выше, чем в соседнем положении.
- Если она пройдет через другой фокус, то окажется в устойчивом равновесном положении 2 й директор D Dr 2.Тяжелая, однородная или неоднородная цепь, в которой концы закреплены или могут скользить по неподвижной кривой или поверхности, занимает сбалансированное положение, где высота центра тяжести является максимальной или минимальной, что составляет 1 из возможных положений этой цепи.
Например, кривая с наименьшим центром тяжести из всех однородных кривых, проходящая через неподвижную точку определенной длины 2, является ранее найденной цепной линией разрез 140.Если вы получаете неподвижную ось Ox на плоскости и 2 неподвижные точки H И B, то из всех кривых определенной длины Z, которые лежат в этой плоскости и проходят через эти точки, цепная линия представляет собой поверхность наименьшей области, поскольку она вращается вокруг оси Ox. Я убежден в этом, основываясь на теореме Гюльдена, поскольку описанная область равна I 2 70, но в то же время равна 7 7, игнорируя условия относительно длины и по крайней мере частично устанавливая 1 снова.
То же самое будет справедливо для точки пересечения двух любых соответствующих сторон обоих многоугольников. Людмила Фирмаль
Результат, полученный ранее: из всех кривых, которые находятся в плоскости и проходят через A и B, кривая, представляющая наименьшую площадь, является цепью line. In факт, пусть C это кривая. Такая же длина, как и сама кривая с, представляющая минимальную площадь b. So это, безусловно, цепная линия с основанием, параллельным быку axis. It остается выяснить, что же описывает наименьшую площадь среди этого бесчисленного множества цепных линий.
Смотрите также:
Решение задач по теоретической механике
| Голономные системы; координаты голономной системы | Принцип Торричелли |
| Частный случай, когда выражение возможной работы есть полный дифференциал | Множители Лагранжа |
