
Оглавление:


Поперечные колебания призматических стержней
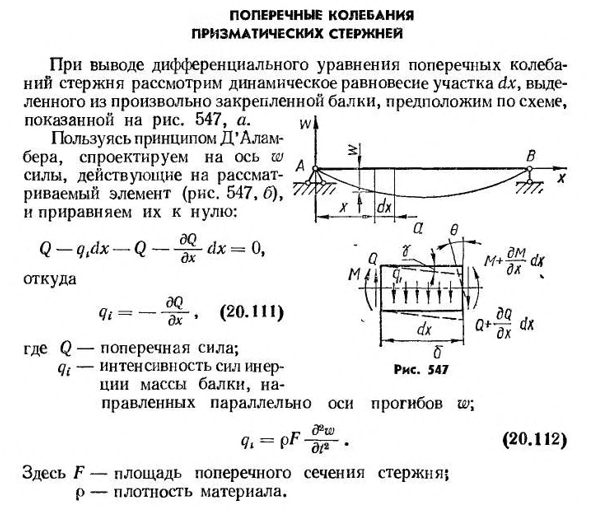
- Горизонтальная вибрация Бар «призма» При выводе дифференциальных уравнений поперечных колебаний стержней принимается схема, показанная на рисунке, с учетом динамического равновесия поперечного сечения dx, которое отделено от произвольно закрепленной балки. 547, а. Используя принцип Д’Аламбера, сила, действующая на рассматриваемый элемент, проецируется на ось со(рис. 547, б), приравниваем их к нулю: Q-qtdx — Q — — — — — (^- dx=0, из которого =(2О. Вт) Где Q-боковая сила, а qi-
интенсивность инерционной силы массы луча, которая направляется отклонением W\ (20.112) Из стержня; ЦТ™ Ци= * Где F-площадь поперечного сечения, p-плотность материала. Если поместить формулу 571 (20.112) в Формулу (20.111) , то уравнение поступательного движения элементов вибрирующего стержня будет найдено в виде PF-r—T>T — <2″ — » 3) кроме поступательного движения, рассматриваемые элементы также совершают вращательные движения в плоскости wx. Для просмотра уравнений движения, учитывающих его вращение, необходимо знать,
что угол между элементом ASIO и осью x зависит не только от поворота Людмила Фирмаль
поперечного сечения 0, но и от смещения от оси x, как показано ниже:: =0+(20.114) Известна зависимость между изгибающим моментом M в поперечном сечении и углом поворота O этого поперечного сечения.: (20.115) Кроме того, в нашем случае она отрицательна между боковой силой Q и углом сдвига y, где:-Q= — kyFG, (20.116), где k-коэффициент формы поперечного сечения. Исходя из зависимости (20.114), формула для Q в соответствии с формулой (20.116) может быть записана как Q= — k F G (~- e y (20.117) момент инерции вращения массы рассматриваемого элемента равен^ — D x.
(20.118) /• Учитывая формулу (20.118), используя принцип Д’Аламбера, динамическое равновесие вращения стержня, мы имеем КТ х — — — — Г X= — Ф>ж — — — ДХ. Разделяй (20.119)выражение (20.119) на DX и рассмотрим выражения (20.115) и (20.117), и писать — КФГ(тег-б)-СЗ+Р7= — ° — <20L20> Если разделить последнее уравнение на X、 <2 0 | 2 | > В качестве выражения перезаписи используется выражение (20.113) (20.117) Ж -) 0,20, 22. $ 72 исключив из уравнения (20.121)и (20.122)угол 0,легко получить дифференциальное уравнение свободных поперечных колебаний стержня постоянного сечения. Действительно, определив из Формулы (20.122)) ДД Р ДВ. <ПМ ДХ ~ к(т «
- д-р ~ +> Кроме того, подставляя их в уравнение (20.121), вы можете, наконец, (20.123) С учетом поперечных колебаний длинномерных стержней, игнорируя инерционные и боковые силовые прогибающие эффекты вращения элементов, как это обычно принято в инженерной практике, используется уравнение (20.123).) Например-ЯТ д^+! ^~Г D Р=Л (20.124) Или dt2g’(20.125) Куда? (20-126)) Представляет скорость распространения деформированной волны вдоль стержня. Простейшим периодическим решением уравнения свободных поперечных колебаний стержня (20.125)является так называемое основное колебание, а функция отклонения колеблющегося стержня изменяется со временем по гармоническому закону: (20.127)
функция f (l), устанавливающая закон распределения максимального амплитудного отклонения точек оси собственных форм прямых колебаний стержня, как известно, бесконечна, и каждая соответствует определенному значению частоты co, которое называется собственной частотой. Эти частоты и соответствующие им собственные формы определяются с использованием собственных уравнений задачи и граничных условий. Чтобы найти уникальное выражение, присвойте выражение(20.127)выражению (20.124).
После приведения к греху (co / +a)) 5 / 3референции — ^Ф(Х)=0,(20.128) Куда? (20.129) Формула (20.128) имеет четыре независимых частных Людмила Фирмаль
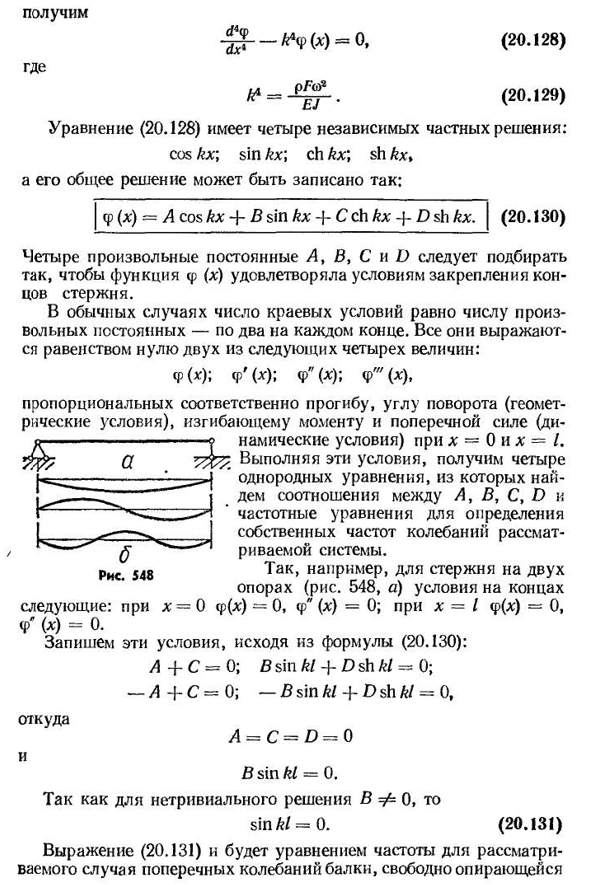
решения: cos kx; sin kx; ch kx; sh kxt и ее общее решение может быть записано как: f(x) — (20.130)функция f(x) должна выбрать четыре произвольные константы A, B, C, D так, чтобы F (x) удовлетворяла условиям фиксации стержней. В обычном случае, число граничных условий равно числу произвольных постоянных. Все они равны двум нулям из четырех значений f (x); f (x); f (x); F (X), которые пропорциональны склонению (геометрическому условию), изгибающему моменту и поперечной силе (di-d) соответственно.—————————- при x-0 и x=I. Для удовлетворения этих условий получены четыре однородных уравнения, в которых получены соотношения между уравнениями A, B, C, D и частотными уравнениями. Поэтому, например, для палки на двух опорах (рис. 548, а) условия на обоих
концах следующие: x=0f (x)=0,f»(x)=0;x=/f(x)=0,f»(x)=0. Запишем эти условия и будем исходить из Формулы (20.130): A4-C=0;в sin kl4-D sh kl-0; — A4-C-0; — в sin kl4-D sh kl=0, Откуда Л=Ы=£>=0 И Син КЛ-0 В. ■Для нетривиального решения=/=0, sinA/=0. Уравнение (20.131) (20.131) и частотное уравнение для возможных боковых колебаний свободно поддерживаемой балки 574 на вашем конце. Это следует из Формулы kt l=in (i=1,2,3.) (20.131). ..), Но с тех пор (Т = ПФ), Это частота естественной круговой вибрации пучка материи (20.132) (20.133) Формула(20.134) А частота колебаний в Гц ф Для внутренней формы
f1gp’I f EJ’L~~2P~V t’beaam вибрации, (20.130), мы получаем уравнение 4>я ( * ) = см, 1Dr i1, 2, 3,… Эти собственные частоты могут быть представлены графически. 548 б Общее решение дифференциальных уравнений, относящихся к рассматриваемой балке на двух опорах(20.125), имеет вид ос Ш(х, Т)=( » ; потому что+БТ грехе(о: 0sin. F=l коэффициента ah bL определяется из начальных условий, представленных соотношением w (x, 0)=и(x); w(x, 0)=сделано с v(x), t=0, где и (x) и v (x)-некоторые заданные функции переменных x и их отдельных элементов бок о бок и бок.
Смотрите также:
