
Оглавление:
| Здравствуйте! Я Людмила Анатольевна Фирмаль, занимаюсь помощью студентам более 17 лет. У меня своя команда грамотных, сильных преподавателей. Мы справимся с любой поставленной перед нами работой технического и гуманитарного плана. И неважно – она по объёму на две формулы или огромная, сложно структурированная, на 125 страниц! Нам по силам всё, поэтому не стесняйтесь, присылайте. |
| Если что-то непонятно — вы всегда можете написать мне в WhatsApp и я вам помогу! |

Как получить помощь в выполнении заданий по теоретической механике
Вы можете написать сообщение в WhatsApp. После этого я оценю ваш заказ и укажу стоимость и срок выполнения вашей работы. Если условия Вас устроят, Вы оплатите, и преподаватель, который ответственен за вашу работу, начнёт выполнение и в согласованный срок или, возможно, раньше срока Вы получите файл готовой работы в личные сообщения.
Сколько стоит помощь
Стоимость помощи зависит от задания и требований Вашего учебного заведения. На цену влияют: сложность, количество заданий и срок выполнения. Поэтому для оценки стоимости заказа максимально качественно сфотографируйте или пришлите файл задания, при необходимости, загружайте поясняющие фотографии лекций, файлы методичек, указывайте свой вариант.
Какой срок выполнения
Минимальный срок выполнения составляет 2-4 дня, но помните, срочные задания оцениваются дороже.
Как оплатить
Сначала пришлите задание, я оценю, после вышлю вам форму оплаты, в которой можно оплатить с баланса мобильного телефона, картой Visa и MasterCard, apple pay, google pay.
Гарантии и исправление ошибок
В течение 1 года с момента получения Вами готового решения действует гарантия. В течении 1 года я и моя команда исправим любые ошибки.
Чуть ниже я предоставила примеры оформления работ по теоретической механике, так я буду оформлять ваши работы если закажите у меня.
Кроме примеров, я разместила и полный курс теории в виде лекций, если вдруг вы захотите попробовать сами решить.
Сначала идёт теория, а потом идут оформленные примеры решения.
Статика
Система сходящихся сил
Система сходящихся сил — это силы, приложенные к телу, линии действия которых пересекаются в одной точке.
- Сложение системы сходящихся сил
- Аналитический способ определения равнодействующей системы сходящихся сил
Пример оформления задачи №2.1.
На рис. 2.4 показаны три силы. Проекции сил  и
и  на оси
на оси  очевидны
очевидны

Чтобы найти проекцию силы  на ось
на ось  , нужно использовать правило двойного проектирования.
, нужно использовать правило двойного проектирования.
Проектируем силу сначала на плоскость  , в которой расположена ось (см. рис. 2.4), получим вектор
, в которой расположена ось (см. рис. 2.4), получим вектор  величиной
величиной  , а затем его проектируем на ось :
, а затем его проектируем на ось :

Аналогично действуя, найдем проекцию на ось  :
:

Проекция на ось  находится проще:
находится проще:
Нетрудно убедиться, что проекции сил на ось  равны:
равны:
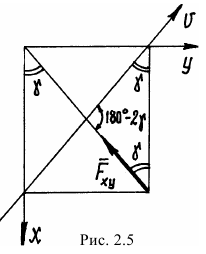
При определении этих проекций удобно воспользоваться рис. 2.5, видом сверху на расположение сил и осей.
Вернемся к системе  сходящихся сил
сходящихся сил  (рис. 2.6). Проведем оси координат с началом в точке пересечения линий действия сил в точке
(рис. 2.6). Проведем оси координат с началом в точке пересечения линий действия сил в точке  . Мы уже знаем (2.1), что равнодействующая сил
. Мы уже знаем (2.1), что равнодействующая сил  . Спроектируем это векторное равенство на оси. Получим проекции равнодействующей
. Спроектируем это векторное равенство на оси. Получим проекции равнодействующей  на оси :
на оси :

Они равны алгебраическим суммам проекций сил на соответствующие оси. А зная проекции равнодействующей, можно определить и величину
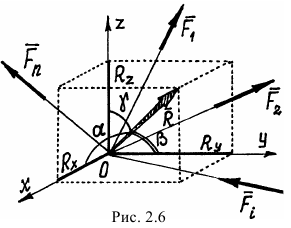
Они равны алгебраическим суммам проекций сил на соответствующие оси. А зная проекции равнодействующей, можно определить и величину ее как диагональ прямоугольного параллелепипеда
или

Направление вектора найдем с помощью направляющих косинусов (см. рис. 2.6)

Система сходящихся сил уравновешивается, если их равнодействующая  , а это возможно только при выполнении условий
, а это возможно только при выполнении условий

Эти условия, алгебраические суммы проекций сил на оси равны нулю, называются уравнениями равновесия системы сходящихся сил, расположенных в пространстве.
Конечно, если все силы расположены в одной плоскости, например , третье уравнение обратится в тождество и останутся лишь два уравнения

Следовательно, среди уравновешенных сил, расположенных в пространстве, можно найти три неизвестные величины; среди сил, расположенных в плоскости, — две.
Пример оформления задачи №2.2.
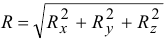
На шар, вес которого  , лежащий на горизонтальной плоскости и привязанный к ней нитью
, лежащий на горизонтальной плоскости и привязанный к ней нитью  , действует сила
, действует сила  (рис.2.7). Определим реакции связей.
(рис.2.7). Определим реакции связей.
Следует сразу заметить, что все задачи статики решаются по одной схеме в определенном порядке.
Продемонстрируем ее на примере решения этой задачи.
- Надо выбрать (назначить) объект равновесия — тело, равновесие которого следует рассмотреть, чтобы найти неизвестные.
В этой задаче, конечно, объект равновесия — шар.
- Построение расчетной схемы. Расчетная схема — это объект равновесия, изображенный отдельно свободным телом, без связей, со всеми силами, действующими на него: реакциями и остальными силами.
Воспользовавшись рис. 1.4, показываем реакцию нити  и нормальную реакцию плоскости —
и нормальную реакцию плоскости —  (см. рис.2.7). Кроме них на шар действуют заданные силы
(см. рис.2.7). Кроме них на шар действуют заданные силы  и
и  .
.
- Надо установить, какая получилась система сил, и составить соответствующие уравнения равновесия.
Здесь получилась система сходящихся сил, расположенных в плоскости, для которой составляем два уравнения (оси можно проводить произвольно)
Решаем систему уравнений и находим неизвестные

По условию задачи требовалось найти давление шара на плоскость. А мы нашли реакцию плоскости на шар. Но по определению (I, п. 6) следует, что эти силы равны по величине, только давление на плоскость будет направлено в противоположную сторону, вниз.
Пример оформления задачи №2.3.
Тело весом  прикреплено к вертикальной плоскости тремя стержнями (рис. 2.8). Определим усилия в стержнях.
прикреплено к вертикальной плоскости тремя стержнями (рис. 2.8). Определим усилия в стержнях.
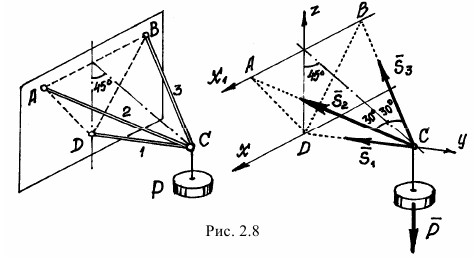
В этой задаче объект равновесия —  вместе с грузом. Он нарисован отдельно с реакциями, усилиями в стержнях
вместе с грузом. Он нарисован отдельно с реакциями, усилиями в стержнях  и весом . Силы образуют пространственную систему сходящихся сил. Составляем три уравнения равновесия
и весом . Силы образуют пространственную систему сходящихся сил. Составляем три уравнения равновесия

Из первого уравнения следует:

Тогда из третьего:

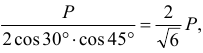
а из второго:

Когда мы направляли усилия в стержнях от узла, от объекта равновесия, то предполагали, что стержни работают на растяжение. Усилие  в стержне
в стержне  получилось отрицательным. Это значит — стержень сжат. Так что знак усилия в стержне указывает, как работает стержень: на растяжение или на сжатие.
получилось отрицательным. Это значит — стержень сжат. Так что знак усилия в стержне указывает, как работает стержень: на растяжение или на сжатие.
Момент силы
- Момент силы относительно точки
- Момент силы относительно оси
- Зависимость между моментами силы относительно точки и относительно оси
Пример оформления задачи №2.4
Определим моменты сил  и
и  относительно осей
относительно осей  (рис. 3.4).
(рис. 3.4).
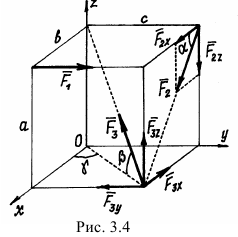
Моменты силы  находятся просто:
находятся просто:

Моменты сил  и — посложнее.
и — посложнее.
В тех случаях, когда вектор силы направлен под углом к оси, полезно разложить вектор силы на составляющие, параллельные осям, и затем находить сумму моментов этих составляющих.
Так, моменты силы :
И силы :

 (линия действия силы пересекает ось
(линия действия силы пересекает ось  ).
).
Пара сил
Произвольная система сил
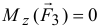
Пример оформления задачи №5.1.
Рама  (рис. 5.4) удерживается в равновесии шарниром
(рис. 5.4) удерживается в равновесии шарниром  и стержнем
и стержнем  . На краю рамы находится груз весом
. На краю рамы находится груз весом  . Определим реакции шарнира и усилие в стержне.
. Определим реакции шарнира и усилие в стержне.
Порядок решения задач остается прежним (см. пример 2.2). Рассматриваем равновесие рамы вместе с грузом.
Строим расчетную схему, изобразив раму свободным телом и показав все силы, действующие на нее: реакции связей и вес груза  . Эти силы образуют систему сил, произвольно расположенных на плоскости.
. Эти силы образуют систему сил, произвольно расположенных на плоскости.
Каким вариантом уравнений (5.12) нужно воспользоваться? Желательно составить такие уравнения, чтобы в них было по одной неизвестной силе. Поэтому попробуем воспользоваться III вариантом, составляя уравнения моментов относительно трех точек, точек пересечения линий действия неизвестных сил.
В нашей задаче это точка , где приложены неизвестные  и
и  ; точка
; точка  , где пересекаются линии действия неизвестных сил и
, где пересекаются линии действия неизвестных сил и  ; точка
; точка  — точка пересечения линий действия сил и . Но, поскольку расстояния до точки находятся не очень просто, воспользуемся II вариантом, составив уравнение проекций сил на ось
— точка пересечения линий действия сил и . Но, поскольку расстояния до точки находятся не очень просто, воспользуемся II вариантом, составив уравнение проекций сил на ось  (на ось
(на ось  проектировать нельзя, т.к. она перпендикулярна прямой
проектировать нельзя, т.к. она перпендикулярна прямой  ).
).
И прежде чем составлять уравнения, сделаем еще одно полезное замечание. Если на расчетной схеме имеется сила, расположенная так, что плечо ее найти сложно, то при определении момента рекомендуется предварительно разложить вектор этой силы на две, более удобно направленные. В данной задаче разложим силу на две:  и
и  (см. рис. 5.4) такие, что модули их
(см. рис. 5.4) такие, что модули их

Составляем уравнения:
Из второго уравнения находим
Из третьего уравнения
Теперь из первого уравнения получим

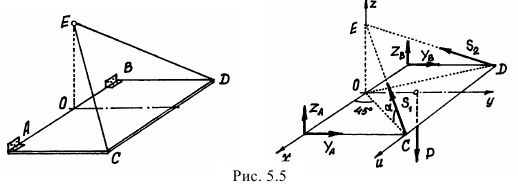
Пример оформления задачи №5.2.
Прямоугольная полка весом  удерживается в горизонтальном положении двумя стержнями
удерживается в горизонтальном положении двумя стержнями  и
и  , прикрепленными к стене в точке
, прикрепленными к стене в точке  (рис. 5.5). Стержни одинаковой длины,
(рис. 5.5). Стержни одинаковой длины,  . Определим усилия в стержнях и реакции петель
. Определим усилия в стержнях и реакции петель  и
и  .
.
Рассматриваем равновесие плиты. Строим расчетную схему. Реакции петель принято показывать двумя силами, перпендикулярными оси петли:  и
и  .
.
Силы образуют систему сил, произвольно расположенных в пространстве. Можем составить шесть уравнений. Неизвестных — тоже шесть.
Какие уравнения составлять — надо подумать. Желательно такие, чтобы они были попроще и чтобы в каждом было поменьше неизвестных. Составим такие уравнения:
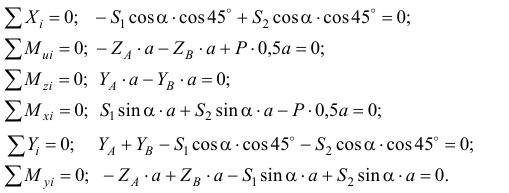
Из уравнения (5.13) получим

Тогда
Из уравнения (5,14)

и по (5.17)

Значит
Так как

то из уравнения (5.18) следует

Тогда по уравнению (5.14)
Из треугольника

где
следует


Поэтому

Для проверки решения можно составить еще одно уравнение и посмотреть, удовлетворяется ли оно при найденных значениях реакций:

Задача решена правильно.
Центр тяжести
Пример оформления задачи №6.1.
Определим центр тяжести однородного тела, изображенного на рис. 6.4.
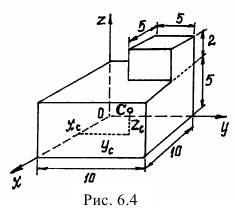
Тело однородное, состоящее из двух частей, имеющих симметричную форму. Координаты центров тяжести их:
Объемы их:

Поэтому координаты центра тяжести тела
Третье замечание. Если тело состоит из однородных пластин одинаковой малой толщины, то объем каждой пластины  , где
, где  -площадь пластины,
-площадь пластины,  — толщина. И координаты центра тяжести будут определяться только с помощью площадей
— толщина. И координаты центра тяжести будут определяться только с помощью площадей

где  — координаты центра тяжести отдельных пластин;
— координаты центра тяжести отдельных пластин;  — общая площадь тела.
— общая площадь тела.
Пример оформления задачи №6.2.
Найдем центр тяжести пластины, согнутой под прямым углом. Размеры — на чертеже (рис. 6.5).
Координаты центров тяжести  и
и  отдельных частей:
отдельных частей:


Их площади:

Поэтому:
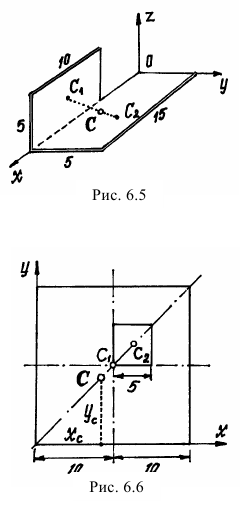
Пример оформления задачи №6.3.
У квадратного листа 20×20 см вырезано квадратное отверстие 5×5 см (рис. 6.6). Найдем центр тяжести листа.
В этой задаче удобнее разделить тело на две части: большой квадрат и квадратное отверстие. Только площадь отверстия надо считать отрицательной. Тогда координаты центра тяжести листа с отверстием
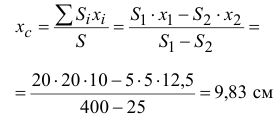
а координата

так как тело имеет ось симметрии (диагональ).
Четвертое замечание. Если тело состоит из стержней, прямых или криволинейных, однородных и постоянного сечения, то вес их  , где
, где  — длина,
— длина,  — вес единицы длины (погонного метра), а координаты центра тяжести будут определяться с помощью длин отдельных участков
— вес единицы длины (погонного метра), а координаты центра тяжести будут определяться с помощью длин отдельных участков

где  — координата центра тяжести
— координата центра тяжести  -го участка;
-го участка; 
Пример оформления задачи №6.4.
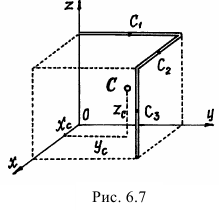
Проволочная скобка (рис. 6.7) состоит из трех участков одинаковой длины  .
.
Координаты центров тяжести участков:



Поэтому координаты центра тяжести всей скобки
Трение в механике
Трением называется сопротивление движению тела. Оно бывает нескольких видов: трения скольжения, качения, верчения, вязкое трение. Рассмотрим первые два.
Пример оформления задачи №6.5
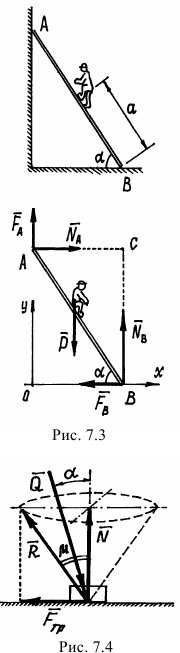
На какое максимальное расстояние  может подняться человек по лестнице, приставленной к стене (рис. 7.3), если вес человека
может подняться человек по лестнице, приставленной к стене (рис. 7.3), если вес человека  , коэффициент трения скольжения между лестницей и стеной
, коэффициент трения скольжения между лестницей и стеной  , между лестницей и полом
, между лестницей и полом  .
.
Рассматриваем равновесие лестницы с человеком. Показываем силу  , нормальные реакции
, нормальные реакции  и
и  и добавляем силы трения:
и добавляем силы трения:
и

Полагаем, что человек находится на расстоянии

при большем значении которого начнется движение лестницы. Составляем уравнения равновесия.
Подставив значения сил трения и решив систему уравнений, получим:
Теперь можно определить и угол, под которым надо поставить лестницу, чтобы добраться до стены. Полагая  , получим после преобразований
, получим после преобразований  или
или 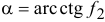 .
.
При исследовании равновесия тел с учетом трения скольжения иногда бывает полезно воспользоваться понятием угла трения и конуса трения.
Углом трения называется угол  между нормальной реакцией
между нормальной реакцией  и полной реакцией плоскости
и полной реакцией плоскости  (рис. 7.4). Если направление вектора силы трения на плоскости меняется, то вектор
(рис. 7.4). Если направление вектора силы трения на плоскости меняется, то вектор  будет направлен по соответствующей образующей конуса, который называется конусом трения.
будет направлен по соответствующей образующей конуса, который называется конусом трения.
Очевидно,
Заметим, что если равнодействующая  всех активных сил (всех, кроме реакций) направлена под углом
всех активных сил (всех, кроме реакций) направлена под углом  (рис. 7.4), то нормальная реакция
(рис. 7.4), то нормальная реакция  , а сила трения
, а сила трения  . Для того чтобы началось скольжение, должно выполняться условие
. Для того чтобы началось скольжение, должно выполняться условие  или
или  . И так как
. И так как  то
то  . Значит, угол
. Значит, угол  должен быть больше угла
должен быть больше угла  . Следовательно, если сила
. Следовательно, если сила  действует внутри угла или конуса трения
действует внутри угла или конуса трения  , то как бы ни была велика эта сила, скольжение тела не произойдет. Такое условие называется условием заклинивания, самоторможения.
, то как бы ни была велика эта сила, скольжение тела не произойдет. Такое условие называется условием заклинивания, самоторможения.
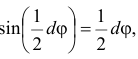
Мы рассмотрели скольжение твердых тел по поверхности. Но нередко встречается скольжение гибких тел по неплоской поверхности. Например, нежелательное проскальзывание в ременной передаче ремня по шкиву или троса, каната, намотанного на неподвижный цилиндр (в частности каната, намотанного на причальные тумбы, кнехты, в морском порту).
Пусть имеется нить, перекинутая через неподвижную круглую цилиндрическую поверхность (рис. 7.5). За счет сил трения натяжения левого и правого концов этой нити будут различными.
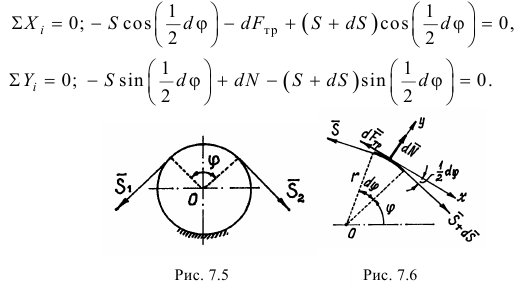
Предположим, что нормальная реакция и сила трения распределяются равномерно по дуге контакта нити на цилиндре. Рассмотрим равновесие участка нити длиной  (рис. 7.6). На левом конце этого участка натяжение
(рис. 7.6). На левом конце этого участка натяжение  , на правом
, на правом  . Составляем уравнения равновесия, проектируя силы на оси:
. Составляем уравнения равновесия, проектируя силы на оси:
Так как угол  — малая величина, то полагаем
— малая величина, то полагаем
С учетом этого из уравнений находим

и так как
имеем
или
Интегрируя, получим
Или

Этот результат называется формулой Эйлера. Например, если нить перекинута через неподвижный шкив и  , а коэффициент трения
, а коэффициент трения  , то отношение натяжений
, то отношение натяжений
А обернув цилиндр один раз
то есть можно удержать груз на другом конце нити силой, почти в три раза меньшей веса тела.
Кинематика
Кинематика точки
Пример оформления задачи №8.3.
Движение точки задано уравнениями

Из первого уравнения

Подставив во второе, получим уравнение траектории:

Это уравнение параболы (рис.8.7).
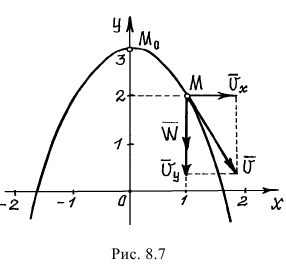
В начале движения при  0 точка находилась на самом верху, в положении
0 точка находилась на самом верху, в положении  .
.
А например, при  она будет в положении
она будет в положении  с координатами
с координатами

Проекции скорости на оси

При

И модуль скорости

Составляющие скорости по осям и вектор её показаны на рис. 8.7.
Проекция ускорения

Так как проекция вектора  на ось
на ось  равна нулю, а на ось
равна нулю, а на ось  — отрицательна, то вектор ускорения направлен вертикально вниз, и величина его постоянна, не зависит от времени.
— отрицательна, то вектор ускорения направлен вертикально вниз, и величина его постоянна, не зависит от времени.
Ускорение точки при естественном способе задания движения.
Прежде всего — несколько сведений из дифференциальной геометрии.
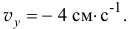
Покажем в точке  на пространственной линии три взаимно перпендикулярные оси. Ось
на пространственной линии три взаимно перпендикулярные оси. Ось  направим по касательной к линии (рис. 8.8). Оси
направим по касательной к линии (рис. 8.8). Оси  и
и  — в плоскости, перпендикулярной оси (в нормальной плоскости I). Ось , которая называется главной нормалью, направлена по линии пересечения нормальной плоскости I и соприкасающейся плоскости II в сторону вогнутости линии.
— в плоскости, перпендикулярной оси (в нормальной плоскости I). Ось , которая называется главной нормалью, направлена по линии пересечения нормальной плоскости I и соприкасающейся плоскости II в сторону вогнутости линии.
Плоскость II названа соприкасающейся потому, что она как бы приставлена сбоку к кривой, соприкасается с ней.
Ось , перпендикулярная и , называется бинормалью («вторая» нормаль).
При движении точки эти оси движутся вместе с нею. Называются эти оси естественными осями. Единичные векторы  , направленные по осям, являются ортами соответствующих осей.
, направленные по осям, являются ортами соответствующих осей.
Производная  характеризует крутизну, кривизну линии в точке ,
характеризует крутизну, кривизну линии в точке ,  — кривизна линии. А величина, обратная кривизне
— кривизна линии. А величина, обратная кривизне  , называется радиусом кривизны в точке . Точка
, называется радиусом кривизны в точке . Точка  , расположенная на главной нормали на расстоянии
, расположенная на главной нормали на расстоянии  , называется центром кривизны.
, называется центром кривизны.
Вектор скорости точки направлен по оси . Поэтому его можно записать так:  (
(  — алгебраическая величина скорости
— алгебраическая величина скорости  ). Ускорение точки
). Ускорение точки

Следовательно, ускорение состоит из двух векторов. Первый вектор

Величина его равна  , а направлен вектор по оси .
, а направлен вектор по оси .
Чтобы определить величину и направление второй составляющей, надо найти производную

Поэтому второй вектор
Теперь становится понятно, что вектор  по модулю будет равен
по модулю будет равен  и направлен по главной нормали, по оси
и направлен по главной нормали, по оси  , так же как единичный вектор
, так же как единичный вектор  .
.
Так как первая составляющая ускорения направлена по касательной к траектории, это ускорение называют касательным ускорением

вторую составляющую соответственно её направлению — нормальным ускорением

Поэтому полное ускорение
Величина этих составляющих ускорения
Обратим внимание на то, что вектор ускорения  находится в соприкасающейся плоскости, проекция его на бинормаль
находится в соприкасающейся плоскости, проекция его на бинормаль  равна нулю,
равна нулю,  . Так как векторы
. Так как векторы  и
и  перпендикулярны друг другу, то
перпендикулярны друг другу, то
Рассмотрим два частных случая.
Первый случай. Точка движется по прямой линии с переменной скоростью. Нормальное ускорение
равно нулю, так как радиус кривизны прямой линии равен бесконечности. А касательное
не равно нулю. Поэтому

Второй случай. Точка движется по кривой линии, но с постоянной по величине скоростью. В этом случае
так как радиус кривизны  конечная величина. Значит,
конечная величина. Значит, 
Сравнение этих двух случаев позволяет сделать вывод, что касательное ускорение характеризует изменение вектора скорости по величине, а нормальное ускорение — изменение вектора скорости по направлению.
Пример оформления задачи №8.4
Точка движется по окружности радиусом  по закону
по закону

При

Значит, движение началось из  (рис. 8.9). Далее, при
(рис. 8.9). Далее, при

при

при

при

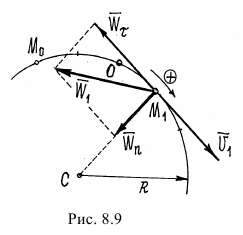
Судя по этим результатам, точка сначала двигалась в положительном направлении, а затем пошла обратно. В крайнем положении скорость точки станет равной нулю.
Так как
то, положив

найдем время  , момент, когда точка окажется в этом крайнем положении:
, момент, когда точка окажется в этом крайнем положении:  Следовательно,
Следовательно,  определяет это положение точки.
определяет это положение точки.
Найдем скорость и ускорение точки при

Скорость

Направлен вектор скорости в положительном направлении  .
.
Касательное ускорение
Вектор  направлен в отрицательном направлении. Нормальное ускорение
направлен в отрицательном направлении. Нормальное ускорение
(радиус кривизны дуги окружности равен её радиусу,  ). Полное ускорение
). Полное ускорение

Так как вектор скорости  и вектор касательного ускорения направлены в противоположные стороны, точка в этот момент движется замедленно.
и вектор касательного ускорения направлены в противоположные стороны, точка в этот момент движется замедленно.
Основные виды движения твёрдого тела
- Поступательное движение тела
- Вращение тела вокруг неподвижной оси
- Вращение тела вокруг неподвижной точки
- Плоскопараллельное движение твердого тела
- План скоростей
- Ускорения точек тела. Мгновенный центр ускорений
Пример оформления задачи №9.1.
Маятник  качается в вертикальной плоскости так, что
качается в вертикальной плоскости так, что  . Длина
. Длина  (рис. 9.4). Маятник вращается вокруг горизонтальной оси
(рис. 9.4). Маятник вращается вокруг горизонтальной оси  , перпендикулярной вертикальной плоскости.
, перпендикулярной вертикальной плоскости.
Угловая скорость маятника  угловое ускорение
угловое ускорение  .
.
Например, при  (вращение по часовой стрелке);
(вращение по часовой стрелке);  (угловое ускорение направлено также по часовой стрелке). Вращение в этом положении ускоренное.
(угловое ускорение направлено также по часовой стрелке). Вращение в этом положении ускоренное.
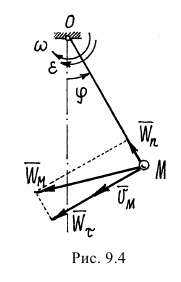
Скорость точки 
 (определяется модуль скорости). Направлен вектор скорости соответственно направлению угловой скорости — в сторону вращения.
(определяется модуль скорости). Направлен вектор скорости соответственно направлению угловой скорости — в сторону вращения.
Нормальное ускорение  , касательное ускорение
, касательное ускорение  . (Определён опять модуль вектора касательного ускорения. Направлен вектор
. (Определён опять модуль вектора касательного ускорения. Направлен вектор  вниз, как указывает угловое ускорение).
вниз, как указывает угловое ускорение).
Величина полного ускорения точки

Пример оформления задачи №9.2.
Водило  , вращаясь вокруг вертикальной оси
, вращаясь вокруг вертикальной оси  с угловой скоростью
с угловой скоростью  , заставляет диск радиусом
, заставляет диск радиусом  кататься по горизонтальной плоскости (рис. 9.9).
кататься по горизонтальной плоскости (рис. 9.9).
Если представить диск как основание конуса с вершиной в неподвижной точке  , то движение диска можно назвать вращением вокруг этой неподвижной точки .
, то движение диска можно назвать вращением вокруг этой неподвижной точки .
Так как скорость точки касания диска с плоскостью равна нулю, то мгновенная ось вращения  проходит через эту точку. И вектор мгновенной угловой скорости
проходит через эту точку. И вектор мгновенной угловой скорости  будет направлен по этой оси.
будет направлен по этой оси.
Точка  вместе с водилом
вместе с водилом  вращается вокруг оси . Поэтому её скорость
вращается вокруг оси . Поэтому её скорость  (см. рис. 9.9). Эта скорость определяет направление вращения диска вокруг оси и направление вектора . Величина угловой скорости
(см. рис. 9.9). Эта скорость определяет направление вращения диска вокруг оси и направление вектора . Величина угловой скорости  (
( — расстояние от до оси ). Теперь можно найти скорость любой точки диска, рассматривая его движение как вращение вокруг оси . Так, например, скорость точки
— расстояние от до оси ). Теперь можно найти скорость любой точки диска, рассматривая его движение как вращение вокруг оси . Так, например, скорость точки  . Так как
. Так как
и

то

Пример оформления задачи №9.3.
Продолжим исследование движения диска (пример 9.2).
Модуль угловой скорости
Значит вектор  вместе с осью , которая всегда проходит через точку касания диска с плоскостью, вращается вокруг оси
вместе с осью , которая всегда проходит через точку касания диска с плоскостью, вращается вокруг оси  и описывает конус (рис. 9.12).
и описывает конус (рис. 9.12).
Точка  на конце вектора движется по окружности радиусом
на конце вектора движется по окружности радиусом

с угловой скоростью  . Поэтому угловое ускорение диска по теореме Резаля
. Поэтому угловое ускорение диска по теореме Резаля

Откладывается вектор  из неподвижной точки
из неподвижной точки  . Направлен он как скорость
. Направлен он как скорость  параллельно оси
параллельно оси  .
.
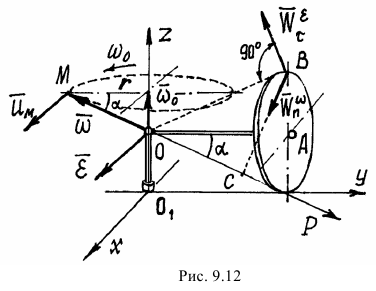
Найдем ускорение точки  .
.
Ускорение

Направлен вектор  перпендикулярно
перпендикулярно  и расположен в плоскости
и расположен в плоскости  .
.
Ускорение

Вектор  направлен по
направлен по  перпендикулярно мгновенной оси
перпендикулярно мгновенной оси  . Модуль вектора
. Модуль вектора  (этот вектор на рисунке не показан) найдём с помощью проекций, проектируя равенство (9.4) на оси
(этот вектор на рисунке не показан) найдём с помощью проекций, проектируя равенство (9.4) на оси  :
:
Значит, ускорение точки
Пример оформления задачи №9.4.
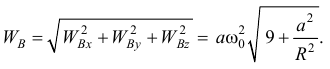
Тело, имеющее форму катушки (рис. 9.23), катится своим средним цилиндром по неподвижной плоскости так, что расстояние  . Радиусы цилиндров известны:
. Радиусы цилиндров известны:  и
и 
 . Определим скорости точек
. Определим скорости точек  и
и  .
.
Мгновенный центр скоростей находится в точке касания катушки с плоскостью. Скорость полюса

Угловая скорость катушки
Скорости точек  и
и  направлены перпендикулярно отрезкам прямых, соединяющих эти точки с мгновенным центром скоростей. Величины скоростей как при вращении вокруг мгновенного центра скоростей
направлены перпендикулярно отрезкам прямых, соединяющих эти точки с мгновенным центром скоростей. Величины скоростей как при вращении вокруг мгновенного центра скоростей  будут равны
будут равны
Пример оформления задачи №9.5.
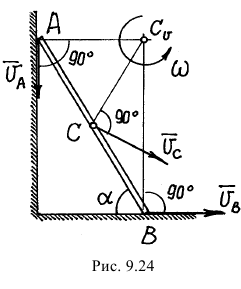
Стержень  (рис. 9.24) скользит концами в вертикальной плоскости по взаимно перпендикулярным прямым так, что при угле с горизонтальной плоскостью, равном
(рис. 9.24) скользит концами в вертикальной плоскости по взаимно перпендикулярным прямым так, что при угле с горизонтальной плоскостью, равном  , скорость нижнего конца
, скорость нижнего конца  . Длина стержня
. Длина стержня  . Определим скорость верхнего конца и угловую скорость стержня.
. Определим скорость верхнего конца и угловую скорость стержня.
Нетрудно определить направление вектора скорости точки , скользящей по вертикальной прямой. Тогда находится на пересечении перпендикуляров к  и
и  (рис. 9.24).
(рис. 9.24).
Угловая скорость
Скорость точки

А скорость центра стержня , например, направлена перпендикулярно  и равна
и равна
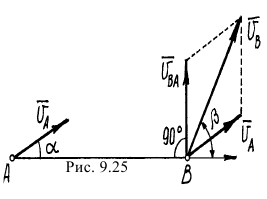
При решении задач бывает полезна теорема о проекции скоростей точек на ось. Докажем её (рис. 9.25). Зависимость между скоростями двух точек и :

Спроектируем это равенство на ось, проведённую по :

Но проекция скорости  на ось равна нулю. Поэтому
на ось равна нулю. Поэтому
или

Вывод. Проекции скоростей двух точек тела на ось, проведённую по этим точкам, равны.
Так, в примере 9.5 скорость точки можно найти проще, используя эту теорему. Проектируя векторы скоростей на ось, проведенную по стержню , получим:

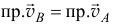
Пример оформления задачи №9.6.
На рис. 9.27 в масштабе изображён механизм. Известна угловая скорость  звена
звена  . Построим план скоростей механизма.
. Построим план скоростей механизма.
Чтобы построить план скоростей, должна быть известна скорость какой-нибудь одной точки и хотя бы направление вектора скорости другой.
В нашем примере можно определить скорость точки :  и направление её вектора
и направление её вектора  .
.
Откладываем (рис. 9.27, 6) из точки  в масштабе
в масштабе  . Известно направление вектора скорости ползуна
. Известно направление вектора скорости ползуна  — горизонтальное (рис. 9.27, а). Проводим на плане скоростей из точки прямую
— горизонтальное (рис. 9.27, а). Проводим на плане скоростей из точки прямую  по направлению скорости
по направлению скорости  , на которой должна находиться точка
, на которой должна находиться точка  , определяющая скорость этой точки
, определяющая скорость этой точки  . Так как стороны плана скоростей перпендикулярны соответствующим звеньям механизма, то из точки а проводим прямую перпендикулярно
. Так как стороны плана скоростей перпендикулярны соответствующим звеньям механизма, то из точки а проводим прямую перпендикулярно  до пересечения с прямой . Точка пересечения определит точку , а значит, и скорость точки :
до пересечения с прямой . Точка пересечения определит точку , а значит, и скорость точки :  . По второму свойству плана скоростей его стороны подобны звеньям механизма. Точка
. По второму свойству плана скоростей его стороны подобны звеньям механизма. Точка  делит пополам, значит, и точка с должна делить
делит пополам, значит, и точка с должна делить  пополам. Точка
пополам. Точка  определит на плане скоростей величину и направление скорости
определит на плане скоростей величину и направление скорости  (если соединить с точкой ).
(если соединить с точкой ).
Скорость точки  равна нулю, поэтому точка
равна нулю, поэтому точка  на плане скоростей совпадает с точкой .
на плане скоростей совпадает с точкой .
Далее. Должно быть  и
и  . Проводим эти прямые, находим их точку пересечения
. Проводим эти прямые, находим их точку пересечения  . Отрезок
. Отрезок  определит вектор скорости
определит вектор скорости  .
.
Пример оформления задачи №9.7.
Диск катится без скольжения по прямой. Центр его имеет скорость  и ускорение
и ускорение  (рис. 9.29). Найдем ускорение точки
(рис. 9.29). Найдем ускорение точки  .
.
Угловую скорость находим с помощью мгновенного центра скоростей
Угловое ускорение при качении колеса по прямой можно найти как производную от угловой скорости. Имея в виду, что  , а точка движется по прямой, получим:
, а точка движется по прямой, получим:

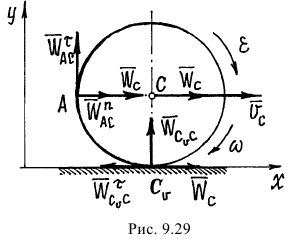
Если — полюс, то

где
Величину ускорения найдём с помощью проекций на оси  и
и  :
:

Тогда

Ускорение мгновенного центра скоростей  :
:

где

И так как
то ускорение
Таким образом, ускорение мгновенного центра скоростей не равно нулю.
Пример оформления задачи №9.8.
Вернёмся к примеру 9.5 (рис. 9.30). Найдём ускорение точки , полагая

то есть ускорение

По (9.6) имеем

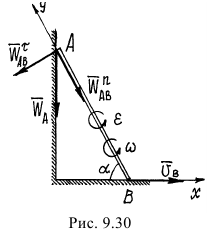
где

но направление вектора  неизвестно, не известно и угловое ускорение
неизвестно, не известно и угловое ускорение  .
.
Предположим, что вектор направлен перпендикулярно  влево. Ускорение
влево. Ускорение  , конечно, направлено по траектории прямолинейного движения точки , предположим, вниз.
, конечно, направлено по траектории прямолинейного движения точки , предположим, вниз.
Спроектируем векторное равенство (9.7) на оси и , получим два уравнения

Из второго уравнения находим ускорение точки 
Положительное значение  указывает на то, что направление вектора выбрано было правильно. Из первого уравнения теперь можно найти ускорение
указывает на то, что направление вектора выбрано было правильно. Из первого уравнения теперь можно найти ускорение
и угловое ускорение
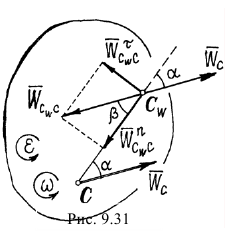
Рассмотрим ещё раз плоскопараллельное движение тела (рис. 9.31). Пусть известны ускорение полюса  , угловая скорость тела
, угловая скорость тела  и его угловое ускорение
и его угловое ускорение  . Проведём из полюса
. Проведём из полюса  прямую под углом
прямую под углом  таким, что
таким, что

отложим этот угол от вектора по направлению углового ускорения .
И на этой прямой найдём точку  на расстоянии от равном
на расстоянии от равном
Докажем, что ускорение этой точки равно нулю.

где

и

Найдём угол  между вектором
между вектором  и прямой
и прямой  .
.
Тангенс его
Значит

И сумма векторов  и
и  равна нулю, то есть ускорение точки равно нулю.
равна нулю, то есть ускорение точки равно нулю.
Следовательно, при плоскопараллельном движении у тела можно отыскать точку, ускорение которой в этот момент времени равно нулю. Такая точка называется мгновенным центром ускорений.
Если у тела удастся найти эту точку, то определение ускорений точек тела значительно упрощается. Действительно, назначив точку : полюсом, ускорение которого равно нулю, формула сложения ускорений получится проще:

То есть ускорения точек тела определяются как при вращении вокруг оси, проходящей через мгновенный центр ускорений перпендикулярно плоскости движения. Например, в примере 9.8 мгновенный центр ускорений находится в точке  и ускорение точки
и ускорение точки  будет определяться как при вращении её вокруг оси, проходящей через точку .
будет определяться как при вращении её вокруг оси, проходящей через точку .
Так как угол  между вектором ускорения точки и прямой, соединяющей её с мгновенным центром ускорений определяется лишь угловым ускорением
между вектором ускорения точки и прямой, соединяющей её с мгновенным центром ускорений определяется лишь угловым ускорением  и угловой скоростью
и угловой скоростью  (9.8), одинаковыми для всех точек, то эти углы, определяющие направление ускорений, для всех точек будут равными.
(9.8), одинаковыми для всех точек, то эти углы, определяющие направление ускорений, для всех точек будут равными.
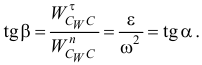
Например, на рис.9.32 показано распределение ускорений точек стержня  (при
(при  угол
угол  ).
).
Следует заметить, что мгновенный центр ускорений и мгновенный центр скоростей  тела — это, как правило, разные точки.
тела — это, как правило, разные точки.
Сложное движение точки
- Абсолютное, относительное и переносное движения точки
- Определение абсолютной скорости точки
- Определение абсолютного ускорения точки
Пример оформления задачи №10.1.
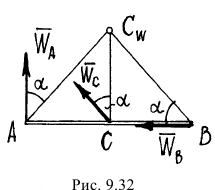
Колечко  движется по вращающемуся стержню так, что
движется по вращающемуся стержню так, что  и
и  (рад) (рис. 10.4).
(рад) (рис. 10.4).
Ранее было установлено, что траектория относительного движения -прямая линия, совпадающая со стержнем, и движение это определяется уравнением  . Траектория точки при переносном движении в момент времени
. Траектория точки при переносном движении в момент времени  — окружность радиусом
— окружность радиусом  . Поэтому относительная скорость
. Поэтому относительная скорость  и направлена по касательной к траектории вдоль стержня (см. рис. 10.4). Переносная скорость колечка, как при вращении вокруг оси,
и направлена по касательной к траектории вдоль стержня (см. рис. 10.4). Переносная скорость колечка, как при вращении вокруг оси,

Направлен вектор этой скорости по касательной к траектории точки при переносном движении перпендикулярно стержню. Абсолютная скорость колечка

Модуль ее, так как


Пример оформления задачи №10.2.
Пусть тело вращается вокруг неподвижной оси  . По поверхности его движется точка
. По поверхности его движется точка  (рис. 10.6). Конечно, скорость этого движения точки — относительная скорость
(рис. 10.6). Конечно, скорость этого движения точки — относительная скорость  , а скорость вращения тела — угловая скорость переносного движения
, а скорость вращения тела — угловая скорость переносного движения  .
.
Ускорение Кориолиса  направлено перпендикулярно этим двум векторам по правилу направления вектора векторного произведения так, как показано на рис. 10.6.
направлено перпендикулярно этим двум векторам по правилу направления вектора векторного произведения так, как показано на рис. 10.6.
Нетрудно сформулировать более удобное правило определения направления вектора  : нужно спроектировать вектор относительной скорости на плоскость, перпендикулярную оси переносного вращения и затем повернуть эту проекцию на 90 градусов в плоскости по направлению переносного вращения. Конечное положение проекции вектора укажет направление кориолисова ускорения. Это правило было предложено Н.Е. Жуковским.
: нужно спроектировать вектор относительной скорости на плоскость, перпендикулярную оси переносного вращения и затем повернуть эту проекцию на 90 градусов в плоскости по направлению переносного вращения. Конечное положение проекции вектора укажет направление кориолисова ускорения. Это правило было предложено Н.Е. Жуковским.
Пример оформления задачи №10.3.
Вернемся к примеру 10.1. Найдем абсолютное ускорение колечка

Переносное ускорение при движении колечка по окружности радиусом 
где


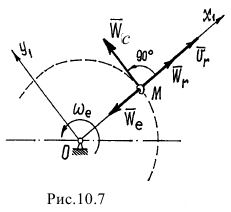
Значит  (рис. 10.7). Относительное ускорение
(рис. 10.7). Относительное ускорение
Ускорение Кориолиса

Вектор направлен перпендикулярно стержню в сторону вращения (по правилу Жуковского).
Величину абсолютного ускорения колечка найдем с помощью проекций на подвижные оси  и
и  . Проектируя равенство (10.13) на оси, получим:
. Проектируя равенство (10.13) на оси, получим:

Тогда

Сложное движение твердого тела
Так же как при сложном движении точки, нередко и движение тела можно рассматривать как сумму нескольких движений. Например, как состоящее из двух поступательных движений или как поступательного движения и вращения вокруг оси. Часто встречаются движения, состоящие из двух вращений вокруг осей или поступательного движения и вращения вокруг точки. Исследование движения точек, принадлежащих телу, совершающему сложное движение, можно проводить методами, изложенными в разд.Х, никаких трудностей это не вызывает. Но анализ сложного движения тела, состоящего из нескольких вращений, обнаруживает некоторые особенности, которые следует рассмотреть специально.
- Сложение вращений тела вокруг двух осей
- Аксиомы динамики в теоретической механике
- Динамика материальной точки
- Определение движении точки естественным способом
- Относительное движение материальной точки
Пример оформления задачи №11.1.
Диск радиусом  вращается вокруг горизонтальной оси с угловой скоростью
вращается вокруг горизонтальной оси с угловой скоростью  , а эта ось вместе с рамкой вращается вокруг вертикальной неподвижной оси с угловой скоростью
, а эта ось вместе с рамкой вращается вокруг вертикальной неподвижной оси с угловой скоростью  (рис.11.4).
(рис.11.4).
Горизонтальная ось — это ось относительного вращения диска  ; вертикальная ось — ось его переносного вращения
; вертикальная ось — ось его переносного вращения  . Соответственно угловые скорости
. Соответственно угловые скорости

векторы их направлены по осям и . Абсолютная угловая скорость диска

а модуль ее, так как

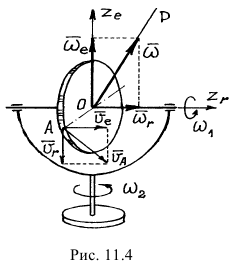
Скорость точки  , например, можно найти как сумму переносной и относительной скоростей:
, например, можно найти как сумму переносной и относительной скоростей:
где

и

или как при абсолютном движении, при вращении вокруг мгновенной оси  ,
,
Вектор скорости  будет расположен в плоскости, перпендикулярной вектору
будет расположен в плоскости, перпендикулярной вектору  и оси
и оси  .
.
Пример оформления задачи №11.2.
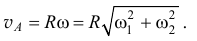
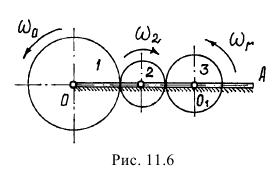
Водило  с укрепленными на нем двумя колесами 2 и 3 вращается вокруг оси
с укрепленными на нем двумя колесами 2 и 3 вращается вокруг оси  с угловой скоростью
с угловой скоростью  . Колесо 2 при этом будет обкатываться по неподвижному колесу 1 и заставит вращаться колесо 3. Найдем угловую скорость
. Колесо 2 при этом будет обкатываться по неподвижному колесу 1 и заставит вращаться колесо 3. Найдем угловую скорость  этого колеса. Радиусы —
этого колеса. Радиусы —  (рис.11.5).
(рис.11.5).
Колесо 3 участвует в двух движениях. Вращается вместе с водилом вокруг неподвижной оси и относительно своей оси  .
.
Ось будет осью переносного вращения, ось — относительного.
Переносная угловая скорость колеса 3 — это угловая скорость водила  , направленная по часовой стрелке, как .
, направленная по часовой стрелке, как .
Чтобы определить угловую скорость относительного движения, наблюдателю нужно находиться на водиле. Он увидит водило неподвижным, колесо 1 вращающимся против часовой стрелки со скоростью (рис. 11.6), а колесо 3 — вращающимся с относительной угловой скоростью  против часовой стрелки. Так как
против часовой стрелки. Так как
то

Оси вращения параллельны, направления вращений противоположны. Поэтому скорость
и направлена так же, как против часовой стрелки. В частности, если

то

и

колесо 3 будет двигаться поступательно.
Исследование движения других подобных конструкций (планетарных и дифференциальных редукторов, передач) ведется аналогичным способом.
Переносной угловой скоростью является угловая скорость водила (рамки, крестовины и т.п.), а чтобы определить относительную скорость какого-либо колеса, нужно водило остановить, а неподвижное колесо заставить вращаться с угловой скоростью водила, но в противоположную сторону.
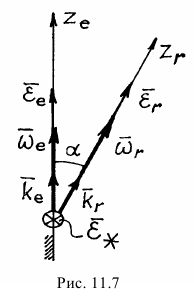
Угловые ускорения тела в абсолютном движении можно искать как производную  , где
, где  . Покажем (рис.11.7) единичные векторы
. Покажем (рис.11.7) единичные векторы  и
и  (орты осей
(орты осей  и
и  ), а векторы угловых скоростей запишем так:
), а векторы угловых скоростей запишем так:

Тогда
и угловое ускорение при


Здесь
и по формуле (10.10)
Поэтому

или
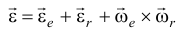
и

где  — угловое ускорение переносного вращения;
— угловое ускорение переносного вращения;  — угловое ускорение относительного вращения;
— угловое ускорение относительного вращения;  ,- добавочное угловое ускорение, которое определяет изменение относительной угловой скорости
,- добавочное угловое ускорение, которое определяет изменение относительной угловой скорости  , при переносном движении. Направлен этот вектор перпендикулярно осям
, при переносном движении. Направлен этот вектор перпендикулярно осям  и
и  , как скорость конца вектора . Модуль добавочного углового ускорения
, как скорость конца вектора . Модуль добавочного углового ускорения  , где
, где  -угол между осями.
-угол между осями.
Конечно, если оси вращения параллельны, это угловое ускорение  будет равно нулю, так как
будет равно нулю, так как  .
.
Общий случай движения тела
Произвольное движение тела — это общий случай движения. Его можно рассматривать как сумму двух движений: поступательного вместе с произвольно выбранным полюсом  и вращения вокруг этого полюса. Первое движение определяется уравнениями движения полюса, точки ,
и вращения вокруг этого полюса. Первое движение определяется уравнениями движения полюса, точки ,
А второе движение — уравнениями вращения вокруг точки с помощью углов Эйлера
Скорости и ускорения точек тела в общем случае при произвольном движении определяются такими же методами, как при сложном движении точки.
Пример оформления задачи №13.3.
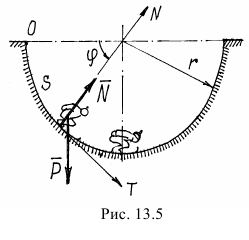
Лыжник спускается по цилиндрической поверхности радиусом  . Определим его движение, пренебрегая сопротивлениями движению (рис. 13.5).
. Определим его движение, пренебрегая сопротивлениями движению (рис. 13.5).
Схема решения задачи та же, что и при координатном способе (пример 13.2). Отличие лишь в выборе осей. Здесь оси  и
и  движутся вместе с лыжником. Так как траектория — плоская линия, то ось
движутся вместе с лыжником. Так как траектория — плоская линия, то ось  , направленную по бинормали, показывать не нужно (проекции на ось действующих на лыжника сил будут равны нулю).
, направленную по бинормали, показывать не нужно (проекции на ось действующих на лыжника сил будут равны нулю).
Дифференциальные уравнения по формуле (13.2) получим такие
Первое уравнение получилось нелинейным:

Так как

то его можно переписать так:
Такое уравнение можно один раз проинтегрировать. Запишем
Тогда в дифференциальном уравнении переменные разделятся
Интегрирование дает решение
Так как при
и

то

и
а
К сожалению, в элементарных функциях второй интеграл найти невозможно. Но и полученное решение позволяет сделать некоторые выводы. Можно найти скорость лыжника в любом положении как функцию угла  . Так, в нижнем положении при
. Так, в нижнем положении при
А из второго уравнения (13.3) при

можно определить давление
То есть давление на лыжника в нижнем положении равно его трехкратному весу.
Пример оформления задачи №13.4.
Вагон движется с постоянным ускорением  . Определим траекторию движения предмета, упавшего с полки высотой
. Определим траекторию движения предмета, упавшего с полки высотой  , которую увидит наблюдатель, пассажир, сидящий в вагоне (рис. 13.7).
, которую увидит наблюдатель, пассажир, сидящий в вагоне (рис. 13.7).
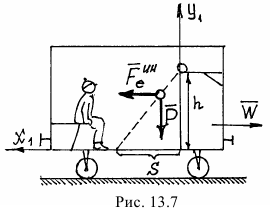
Порядок решения задачи тот же, что и при определении абсолютного движения. Только оси надо провести по вагону и учесть кроме веса предмета  переносную силу инерции
переносную силу инерции
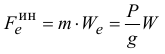
(кориолисова сила инерции  , переносное движение поступательное).
, переносное движение поступательное).
Дифференциальные уравнения относительного движения получаются такими:
Решение этих уравнений:
Используя начальные условия (при  , так как
, так как  ), найдем постоянные интегрирования:
), найдем постоянные интегрирования: 
 . Поэтому уравнения движения
. Поэтому уравнения движения
Траекторию движения получим, исключив параметр  :
:
Это уравнение прямой (см. рис. 13.7). Предмет упадет на пол вагона на расстоянии

от края полки (при  координата
координата  ).
).
Если вагон будет двигаться равномерно  , то
, то  . Наблюдатель увидит траекторию — вертикальную прямую, такую же, как и при неподвижном вагоне.
. Наблюдатель увидит траекторию — вертикальную прямую, такую же, как и при неподвижном вагоне.
Пример оформления задачи №13.5.
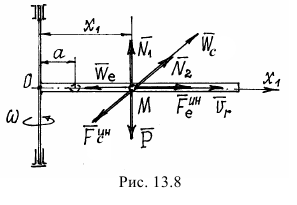
Внутри трубки, вращающейся с постоянной угловой скоростью  вокруг вертикальной оси, находится шарик
вокруг вертикальной оси, находится шарик  , привязанный нитью длиной
, привязанный нитью длиной  к оси вращения (рис. 13.8). Определим движение шарика в трубке после того, как нить оборвется. Сопротивление движению учитывать не будем.
к оси вращения (рис. 13.8). Определим движение шарика в трубке после того, как нить оборвется. Сопротивление движению учитывать не будем.
Траектория движения шарика в трубке — прямая. Поэтому для определения этого движения достаточно одной координаты  . Начало координат, точка
. Начало координат, точка  , — на оси вращения. В промежуточном положении на шарик действуют силы: вес
, — на оси вращения. В промежуточном положении на шарик действуют силы: вес  , две составляющие реакции трубки
, две составляющие реакции трубки  и
и  . Добавляем переносную силу инерции
. Добавляем переносную силу инерции
кориолисову силу инерции

и составляем дифференциальное уравнение движения
Или после подстановки значения переносной силы инерции и преобразований
Решение такого дифференциального уравнения, как известно, имеет вид:

Так как при
и

то

Значит
и уравнение движения станет таким:
Относительная скорость шарика

А так как
то

Можно теперь определить относительную скорость шарика в любом положении. Так, шарик вылетит из трубки длиной  со скоростью
со скоростью
Материальная система
- Основные определения и характеристики материальной системы
- Моменты инерции тел в теоретической механике
Пример оформления задачи №13.6
Определим момент инерции диска относительно оси  , расположенной под углом
, расположенной под углом  к оси симметрии диска
к оси симметрии диска  , в плоскости yCz (рис. 14.5).
, в плоскости yCz (рис. 14.5).
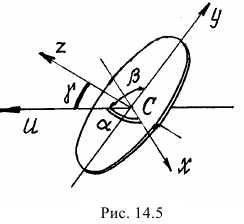
Оси  — главные центральные оси инерции, так как они являются осями симметрии.
— главные центральные оси инерции, так как они являются осями симметрии.
Тогда

где — угол между осями и ; угол  — угол между осями и
— угол между осями и  ; равный
; равный  ; угол
; угол  — угол между осями и
— угол между осями и  , равный 90°. Поэтому
, равный 90°. Поэтому

Энергия материальной системы
- Работа силы в материальной системы
- Потенциальная энергия
- Кинетическая энергия
- Теорема об изменении кинетической энергии материальной системы
- Закон сохранения энергии
- Принцип Даламбера
- Силы инерции твердого тела в теоретической механике
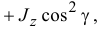
Пример оформления задачи №15.1.
Работа веса тела (силы тяжести) Пусть тело перемещается вблизи поверхности Земли из одного положения в другое так, что центр тяжести его движется по кривой линии (рис. 15.3). Элементарная работа силы  , постоянной и направленной вертикально вниз, по выражению (15.4),
, постоянной и направленной вертикально вниз, по выражению (15.4),  Поэтому
Поэтому

или

Следовательно, работа веса тела (постоянной силы тяжести) не зависит от траектории движения центра тяжести. Определяется лишь высотой, на которую опустится или поднимется центр тяжести.
Пример оформления задачи №5.12.
Работа силы, приложенной к телу, вращающемуся вокруг неподвижной оси.
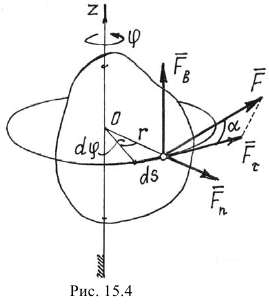
В этом случае (рис. 15.4) точка приложения силы  движется по дуге окружности радиусом
движется по дуге окружности радиусом  . Элементарная работа вычисляется по формуле (15.2)
. Элементарная работа вычисляется по формуле (15.2)  , где
, где  . Поэтому
. Поэтому  .
.
Но  . Это нетрудно установить, разложив силу на три составляющие (см. рис. 15.4). (Моменты сил
. Это нетрудно установить, разложив силу на три составляющие (см. рис. 15.4). (Моменты сил  и
и  относительно оси
относительно оси  равны нулю). Значит,
равны нулю). Значит,
В частности, если момент силы относительно оси  , работа силы при повороте тела на угол
, работа силы при повороте тела на угол  равна
равна
Знак работы определяется знаками момента силы и угла поворота. Если они одинаковы, работа положительная.
Из формулы (15.7) следует и правило определения работы пары сил. Если пара с моментом  расположена в плоскости, перпендикулярной оси вращения тела, то ее работа при повороте тела на угол
расположена в плоскости, перпендикулярной оси вращения тела, то ее работа при повороте тела на угол

Если же пара сил действует в плоскости, не перпендикулярной оси вращения, то ее надо заменить двумя парами. Первую расположить в плоскости, перпендикулярной оси, другую — в плоскости параллельной оси. Моменты их определяются разложением вектора момента  по соответствующим направлениям
по соответствующим направлениям  . Конечно, работу будет совершать только первая пара с моментом
. Конечно, работу будет совершать только первая пара с моментом  , где
, где  — угол между вектором и осью вращения ,
— угол между вектором и осью вращения ,

Пример оформления задачи №15.3.
Работа силы упругости.
Такая сила (рис. 15.5) возникает при деформации упругого тела. Если сила подчиняется закону Гука, то ее величина будет пропорциональна деформации. Так, при удлинении, например, пружины на величину  сила равна
сила равна

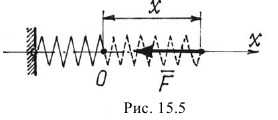
(Постоянная, коэффициент  — называется жесткостью пружины). Сила эта переменная. Поэтому по (15.4)
— называется жесткостью пружины). Сила эта переменная. Поэтому по (15.4)

И, если начало координат  находится на конце недеформированной пружины, то полная работа при перемещении конца пружины от положения
находится на конце недеформированной пружины, то полная работа при перемещении конца пружины от положения  до
до 
Конечно, при увеличении деформации (сжатия или растяжения) работа силы — отрицательная; при уменьшении — положительная.
Этот результат верен для любого упругого тела. И деформацией может быть не только линейное перемещение, но и угол поворота, и объем тела и др. Соответственно изменится и размерность коэффициента жесткости.
Пример оформления задачи №15.4.
Какую скорость надо сообщить точке  стержня, прикрепленного верхним концом с помощью шарнира
стержня, прикрепленного верхним концом с помощью шарнира  к неподвижной поверхности (рис. 15.13), чтобы стержень совершил четверть оборота?
к неподвижной поверхности (рис. 15.13), чтобы стержень совершил четверть оборота?
В первом вертикальном положении кинетическая энергия стержня, начавшего вращаться вокруг оси :

Во втором положении, где стержень достигнет горизонтального положения и остановится на мгновение,

Работу совершит только вес стержня 
По теореме получим уравнение
из которого следует

Пример оформления задачи №16.1.
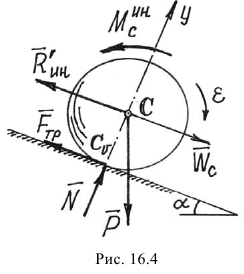
Шар весом  скатывается без скольжения по наклонной плоскости. Определим реакции плоскости и ускорение центра масс
скатывается без скольжения по наклонной плоскости. Определим реакции плоскости и ускорение центра масс  .
.
Показываем внешние силы, действующие на шар: вес  , реакции
, реакции  и
и  (трение качения учитывать не будем). Добавляем силы инерции: главный вектор
(трение качения учитывать не будем). Добавляем силы инерции: главный вектор  , приложенный к центру масс, и главный момент сил инерции относительно центральной оси (рис. 16.4). Величина их
, приложенный к центру масс, и главный момент сил инерции относительно центральной оси (рис. 16.4). Величина их
Составляем уравнения равновесия:
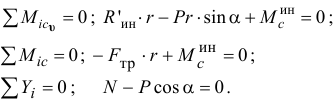
Из первого уравнения находим ускорения центра масс. Так как

то
Из второго уравнения — силу трения
из третьего — нормальную реакцию
Так как при движении без скольжения сила трения  то шар будет скатываться без скольжения, если выполняется условие
то шар будет скатываться без скольжения, если выполняется условие

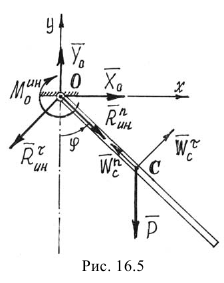
Пример оформления задачи №16.2.
Однородный стержень весом  и длиной
и длиной  качается как маятник в вертикальной плоскости, вращаясь вокруг оси
качается как маятник в вертикальной плоскости, вращаясь вокруг оси  (рис. 16.5). Определим движение стержня и реакции оси.
(рис. 16.5). Определим движение стержня и реакции оси.
На стержень действуют сила  и реакции оси
и реакции оси  и
и  . Добавляем силы инерции. Приводим их к точке на оси вращения. Главный вектор сил инерции, состоит из двух векторов, равным по величине:
. Добавляем силы инерции. Приводим их к точке на оси вращения. Главный вектор сил инерции, состоит из двух векторов, равным по величине:

Главный момент сил инерции относительно оси вращения
Направляем его в сторону, противоположную предполагаемому положительному направлению углового ускорения  .
.
Составляем уравнение равновесия, уравнение моментов сил относительно оси ,

Подставив значение  , получим дифференциальное уравнение вращения
, получим дифференциальное уравнение вращения
Это нелинейное дифференциальное уравнение. Решение его в элементарных функциях не существует. Но первый интеграл можно найти.
Так как
то в уравнении (16.2) переменные разделяются:
Проинтегрировав, получим
Если движение началось из горизонтального положения (при 
 ), то постоянная
), то постоянная  . И тогда
. И тогда
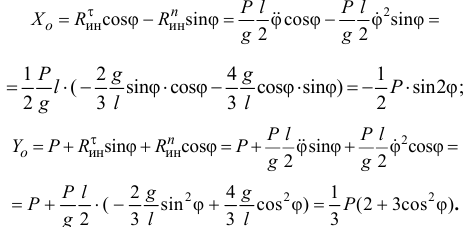
Составив уравнения проекций сил на оси  и
и  ,
,
найдем реакцию:
Так, например, в начале движения при
А в нижнем положении при
Заметим, что при решении этой задачи вместо главного вектора и главного момента сил инерции можно было показать только равнодействующую сил инерции, равную, конечно, главному вектору и приложенную к точке  на расстоянии
на расстоянии
Принцип возможных перемещений
- Возможные перемещения. Классификация связей
- Принцип возможных перемещений при равновесии материальной системы
- Принцип возможных перемещений при движении материальной системы
Пример оформления задачи №17.1.
Какую силу  надо приложить к желобу с грузом весом
надо приложить к желобу с грузом весом  , чтобы удержать его в равновесии (рис. 17.3)?
, чтобы удержать его в равновесии (рис. 17.3)?
Эту задачу можно решить известными методами статики, составляя уравнения равновесия. Но при этом придется прежде отыскать усилия в стержнях. Принцип возможных перемещений позволяет найти силу проще с помощью общего уравнения статики.
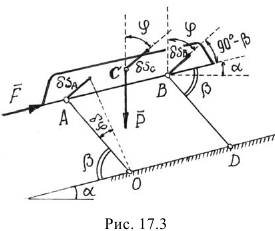
Показываем активные силы  и
и  . Даем системе возможное перемещение, повернув стержень
. Даем системе возможное перемещение, повернув стержень  на угол
на угол  (см. рис. 17.3). Так как желоб совершит поступательное движение, то значит перемещения всех его точек будут одинаковы
(см. рис. 17.3). Так как желоб совершит поступательное движение, то значит перемещения всех его точек будут одинаковы

где
Составляем уравнения работа:

Угол

Поэтому получим

Отсюда
Пример оформления задачи №17.2.
На рис. 17.4 изображена конструкция, состоящая из четырех одинаковых  -образных рам, соединенных шарнирами
-образных рам, соединенных шарнирами  .
.
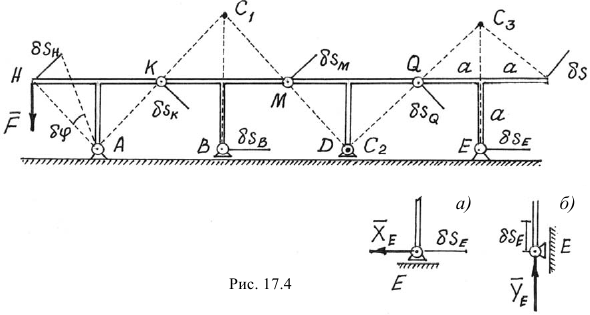
Опоры  и
и  — шарнирно-неподвижные,
— шарнирно-неподвижные,  и
и  — шарнирно-подвижные.
— шарнирно-подвижные.
Определим горизонтальную составляющую  реакции опоры
реакции опоры  , вызванную силой
, вызванную силой  приложенной к левой раме.
приложенной к левой раме.
Методы статики дадут довольно сложное и длинное решение, так как придется рассматривать равновесие четырех рам и решать систему из 12 уравнений с 12 неизвестными.
Принцип возможных перемещений дает более простое и короткое решение. Надо изменить конструкцию опоры . Сделаем ее подвижной, а чтобы система осталась в равновесии, приложим к опоре силу , ту силу, которую нужно определить (рис. 17.4, а).
Даем затем системе возможное перемещение, повернув левую раму вокруг опоры на угол  . С помощью мгновенных центров скоростей
. С помощью мгновенных центров скоростей  ,
,  и
и  каждой рамы обнаруживаем, что
каждой рамы обнаруживаем, что

а

или

Составляем уравнение работ, общее уравнение статистики

или
Отсюда
Чтобы определить вертикальную составляющую  реакции опоры , ее надо вновь переделать (рис. 17.4, б), дать системе соответствующее возможное перемещение и составить уравнение работ.
реакции опоры , ее надо вновь переделать (рис. 17.4, б), дать системе соответствующее возможное перемещение и составить уравнение работ.
Пример оформления задачи №7.3.
Определим ускорение груза  (рис. 17.5). Вес цилиндра —
(рис. 17.5). Вес цилиндра —  , радиус —
, радиус —  . Цилиндр катится по плоскости без скольжения. Показываем задаваемые силы —
. Цилиндр катится по плоскости без скольжения. Показываем задаваемые силы —  . Добавляем силы инерции. Сила инерции груза, движущегося поступательно:
. Добавляем силы инерции. Сила инерции груза, движущегося поступательно:

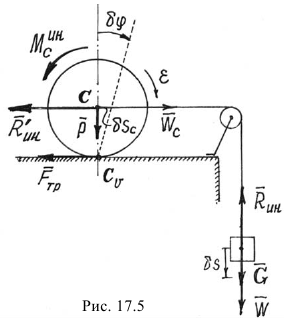
Цилиндр совершает плоскопараллельное движение. Главный вектор сил инерции точек его
Главный момент сил инерции относительно центральной оси 
так как

Даем системе возможное перемещение, сдвинув груз вниз на малую величину  . Центр цилиндра сместится вправо на величину
. Центр цилиндра сместится вправо на величину  , а весь цилиндр повернется вокруг мгновенного центра скоростей
, а весь цилиндр повернется вокруг мгновенного центра скоростей  на угол
на угол
Вычисляем работу сил на этих перемещениях и составляем уравнение работ, общее уравнение динамики

Так как
то, подставив значения сил инерции, получим уравнение:

из которого находим
Уравнения Лагранжа
- Обобщенные координаты в теоретической механике
- Обобщенные силы
- Уравнения равновесия Лагранжа
- Обобщенные силы инерции в теоретической механике
Пример оформления задачи №18.1.
По качающемуся в вертикальной плоскости стержню скользит колечко  весом
весом  (рис. 18.4). Стержень считаем невесомым.
(рис. 18.4). Стержень считаем невесомым.
Определим обобщенные силы.
Система имеет две степени свободы. Назначаем две обобщенные координаты  и
и  . Найдем обобщенную силу, соответствующую координате . Даем приращение
. Найдем обобщенную силу, соответствующую координате . Даем приращение  этой координате и, оставив вторую координату неизменной, вычисляя работу единственной активной силы , получим обобщенную силу
этой координате и, оставив вторую координату неизменной, вычисляя работу единственной активной силы , получим обобщенную силу

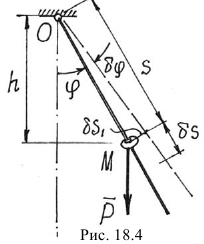
Затем даем приращение  координате , полагая
координате , полагая  . При повороте стержня на угол точка приложения силы , колечко , переместится на
. При повороте стержня на угол точка приложения силы , колечко , переместится на  . Обобщенная сила получится такой:
. Обобщенная сила получится такой:

Так как система консервативная, обобщенные силы можно найти и с помощью потенциальной энергии

Получим

Получается гораздо проще.
Пример оформления задачи №18.2.
Стержень  весом
весом  может вращаться в вертикальной плоскости вокруг оси
может вращаться в вертикальной плоскости вокруг оси  (рис. 18.6). Найдем положения равновесия и исследуем их устойчивость.
(рис. 18.6). Найдем положения равновесия и исследуем их устойчивость.
Стержень имеет только одну степень свободы. Обобщенная координата — угол  . Относительно нижнего, нулевого, положения потенциальная энергия
. Относительно нижнего, нулевого, положения потенциальная энергия  или
или

В положении равновесия должно быть
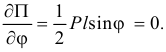
Отсюда имеем два положения, соответствующие углам  и
и  (положения
(положения  и
и  ).
).
Исследуем их устойчивость. Находим вторую производную
Конечно, при
Положение равновесия устойчиво. А при
Значит, второе положение равновесие — неустойчиво. Результаты очевидно.
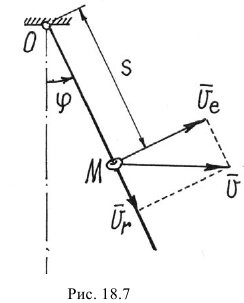
Пример оформления задачи №18.3.
Продолжим исследование движения колечка  на качающемся стержне (см. пример 18.1).
на качающемся стержне (см. пример 18.1).
Обобщенные координаты назначены —  и
и  (рис. 18.7). Обобщенные силы определены:
(рис. 18.7). Обобщенные силы определены:  и
и  .
.
Кинетическая энергия колечка

Где

а

Поэтому
Составляем два уравнения Лагранжа

Так как
то уравнения получается такими:
или
Получили два нелинейных дифференциальных уравнения второго порядка, для решения которых нужны специальные методы.
Пример оформления задачи №18.4.
Составим дифференциальное уравнение движения балочки  , которая перекатывается без скольжения по цилиндрической поверхности (рис. 18.8). Длина балочки
, которая перекатывается без скольжения по цилиндрической поверхности (рис. 18.8). Длина балочки  , вес —
, вес — .
.
В положении равновесия балочка располагалась горизонтально и центр тяжести  ее находился на верхней точке цилиндра. Балочка имеет одну степень свободы. Положение этой балочки определяется обобщенной координатой — углом .
ее находился на верхней точке цилиндра. Балочка имеет одну степень свободы. Положение этой балочки определяется обобщенной координатой — углом .
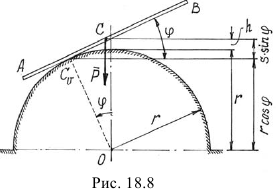
Система консервативная. Поэтому уравнение Лагранжа составим с помощью потенциальной энергии  , вычисленной относительно горизонтального положения. В точке касания находится мгновенный центр скоростей и
, вычисленной относительно горизонтального положения. В точке касания находится мгновенный центр скоростей и  (
( равно длине дуги окружности с углом ф). Поэтому
равно длине дуги окружности с углом ф). Поэтому

(см. рис. 18.8) и

Кинетическая энергия (балка совершает плоскопараллельное движение)

Находим необходимые производные для уравнения
Составляем уравнение

Окончательно получаем

Динамика
В предыдущих разделах излагались методы определения движения материальной системы, которые сводились к составлению дифференциальных уравнений, как правило, второго порядка. И решение их оказывалось не всегда простым.
Если ввести новые обобщенные понятия, характеризующие свойства и движение системы в целом, то эти трудности нередко можно обойти. К ним относятся понятия о центре масс и кинетической энергии, которые уже нам знакомы, понятия о количестве движения материальной системы и моменте количества движения.
Общие теоремы динамики
Теоремы, определяющие изменение этих характеристик, позволяют получить более полное представление о движении материальной системы.
- Теорема о движении центра масс
- Теорема об изменении количества движения
- Теорема об изменении момента количества движения
- Дифференциальные уравнения вращения твердого тела
- Дифференциальное уравнение вращения тела при плоскопараллельном движении
- Дифференциальные уравнения плоскопараллельного движения тела
Пример оформления задачи №19.1.
Человек перешел с кормы лодки на нос. Определим перемещение лодки  (рис. 19.2). Вес лодки —
(рис. 19.2). Вес лодки —  человека —
человека —  длина лодки —
длина лодки —  . Сопротивление движению не учитываем. Определим движение центра масс
. Сопротивление движению не учитываем. Определим движение центра масс  системы, состоящей из человека и лодки.
системы, состоящей из человека и лодки.
Составляем дифференциальное уравнение движения центра масс по оси  (19.2):
(19.2):
Но так как проекции внешних сил  и
и  на ось равны нулю, то
на ось равны нулю, то  . Проинтегрировав дважды это уравнение, получим
. Проинтегрировав дважды это уравнение, получим  и
и  . Но в начале движения система была неподвижна :
. Но в начале движения система была неподвижна :  . Значит,
. Значит,  и
и  .
.
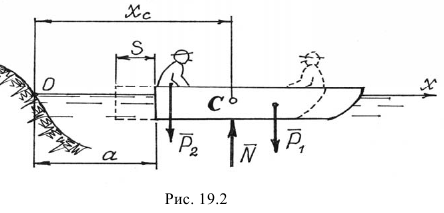
Найдем координату  в первом положении системы, когда человек находился на корме, как координату центра тяжести по формулам (14.2)
в первом положении системы, когда человек находился на корме, как координату центра тяжести по формулам (14.2)

И во втором положении, когда человек перейдет на нос лодки:

Приравниваем координаты, так как 
Из этого равенства находим перемещение лодки

Пример оформления задачи №19.2.
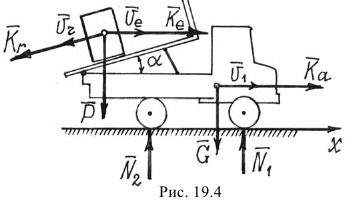
Груз весом  спускается по кузову автомобиля со скоростью
спускается по кузову автомобиля со скоростью  (рис. 19.4). При этом сам автомобиль начнет движение. Определим его скорость
(рис. 19.4). При этом сам автомобиль начнет движение. Определим его скорость  . Вес автомобиля —
. Вес автомобиля —  . Сопротивления движению не учитываем.
. Сопротивления движению не учитываем.
Составим уравнение (19.10) для оси 

В начале движения количество движения всей системы равно нулю  , система была неподвижна. Во втором положении количество движения системы складывается из количества движения автомобиля
, система была неподвижна. Во втором положении количество движения системы складывается из количества движения автомобиля  (предполагается, что он движется вправо) и количества движения груза.
(предполагается, что он движется вправо) и количества движения груза.
Абсолютная скорость груза  . Относительная скорость
. Относительная скорость  , переносная
, переносная  . Соответственно этим скоростям показываем две составляющие вектора количества движения груза:
. Соответственно этим скоростям показываем две составляющие вектора количества движения груза:  и
и  .
.
Все внешние силы (вес  и
и  , реакции плоскости
, реакции плоскости  ) направлены вертикально, и импульсы их будут вертикальными. Составляем уравнение, проектируя все векторы на ось :
) направлены вертикально, и импульсы их будут вертикальными. Составляем уравнение, проектируя все векторы на ось :

Подставляем их значения:
Отсюда
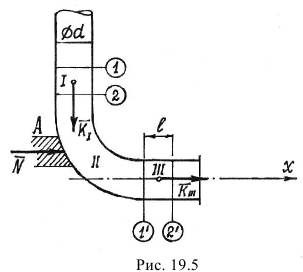
Пример оформления задачи №19.3.
Определим горизонтальное давление трубы на опору  (рис. 19.5). В трубе движется жидкость со скоростью
(рис. 19.5). В трубе движется жидкость со скоростью  . Диаметр трубы —
. Диаметр трубы —  .
.
По теореме (19.9)
Рассмотрим движение жидкости, заключенной между сечениями 1 и  . Через время
. Через время  сечения окажутся в положениях 2 и
сечения окажутся в положениях 2 и  соответственно (см. рис. 19.5).
соответственно (см. рис. 19.5).
В первом положении количество движения  складывалось из количеств движения объемов I и II:
складывалось из количеств движения объемов I и II:
Во втором положении
Тогда изменение количества движения


И уравнение (19.9) запишется так:

Единственными внешними силами будут вес жидкости, вес трубы и реакция опоры  . Проектируются на ось
. Проектируются на ось  только вектор импульса реакции
только вектор импульса реакции  и вектор
и вектор  .
.
Проектируя равенство (*) на ось , получим  . Так как объем жидкости
. Так как объем жидкости  и плотность ее
и плотность ее  , то
, то 
 . Тогда по (**) получим уравнение
. Тогда по (**) получим уравнение
из которого
Давление на опору равно  , но будет направлено, конечно, в противоположную сторону.
, но будет направлено, конечно, в противоположную сторону.
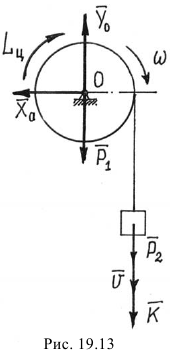
Пример оформления задачи №19.4.
Однородный сплошной цилиндр вращается вокруг горизонтальной оси  под действием намотанной на него нити с грузом на конце (рис. 19.13). Вес цилиндра —
под действием намотанной на него нити с грузом на конце (рис. 19.13). Вес цилиндра —  груза —
груза —  . Радиус цилиндра —
. Радиус цилиндра —  .
.
По теореме (19.19)
так как

где

то, взяв производную по времени и приняв ее к
получим
Отсюда угловое ускорение
а ускорение груза
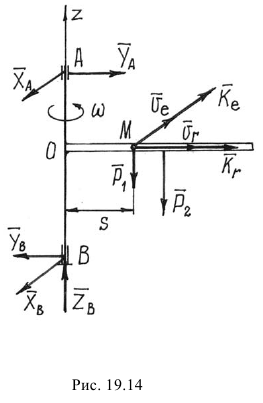
Пример оформления задачи №19.5.
Внутри трубки, вращающейся вокруг вертикальной оси (рис. 19.14), движется шарик  . Вначале, когда шарик находился на расстоянии
. Вначале, когда шарик находился на расстоянии  от оси, угловая скорость трубки была
от оси, угловая скорость трубки была  . Определим угловую скорость в зависимости от положения шарика, от расстояния
. Определим угловую скорость в зависимости от положения шарика, от расстояния  . Вес шарика — трубки — , длина ее —
. Вес шарика — трубки — , длина ее —  .
.
Главный момент внешних сил (веса, реакций подшипников) относительно оси вращения равен нулю. Значит,  или
или  .
.
В первом положении, в начальном

где момент инерции трубки относительно оси вращения как стержня
Количество движения шарика в переносном движении
Поэтому в первом положении
Во втором положении, на расстоянии ,

(Момент вектора количества движения шарика в относительном движении  относительно оси вращения равен нулю).
относительно оси вращения равен нулю).
Приравнивая  и
и  получим уравнение
получим уравнение

из которого находим
Скорость вращения трубки будет уменьшаться с увеличением расстояния .
Пример оформления задачи №19.6.
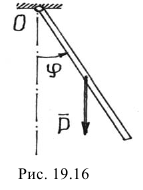
Стержень весом  и длиной
и длиной  качается как маятник в вертикальной плоскости, вращаясь вокруг горизонтальной оси
качается как маятник в вертикальной плоскости, вращаясь вокруг горизонтальной оси  (рис. 19.16). Составим уравнение качаний стержня.
(рис. 19.16). Составим уравнение качаний стержня.
Так как  , а реакция оси не учитываются, то по (19.21) получим
, а реакция оси не учитываются, то по (19.21) получим
или
Пример оформления задачи №19.7.
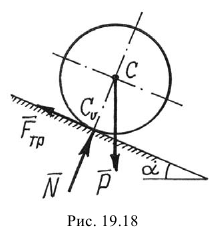
Однородный круглый цилиндр скатывается по наклонной плоскости (рис. 19.18). Цилиндр совершает плоскопараллельное движение. Так как  и, значит,
и, значит,  , составим дифференциальное уравнение вращения относительно оси
, составим дифференциальное уравнение вращения относительно оси  , проходящей через мгновенный центр скоростей.
, проходящей через мгновенный центр скоростей.
Момент инерции цилиндра относительно оси

Уравнение получится таким:
или
Знак (-) указывает на направление углового ускорения — по часовой стрелке. Обратим внимание на то, что реакции не вошли в уравнение.
Чтобы определить реакцию  , можно составить еще одно дифференциальное уравнение вращения относительно центральной оси
, можно составить еще одно дифференциальное уравнение вращения относительно центральной оси  (19.22):
(19.22):
Отсюда

Конечно,

Чтобы тело катилось без скольжения, должно выполняться условие  или
или  . Поэтому коэффициент трения скольжения должен удовлетворять условию
. Поэтому коэффициент трения скольжения должен удовлетворять условию  .
.
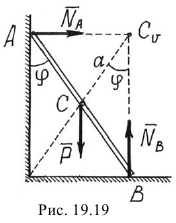
Пример оформления задачи №19.8.
Балочка  длиной
длиной  и весом
и весом  падает, скользя концами по гладким поверхностям стены и пола (рис. 19.19). Составим дифференциальное уравнение вращения.
падает, скользя концами по гладким поверхностям стены и пола (рис. 19.19). Составим дифференциальное уравнение вращения.
Здесь
Поэтому опять выгоднее составить дифференциальное уравнение вращения относительно оси . Тем более, что неизвестные реакции  и
и  не войдут в это уравнение.
не войдут в это уравнение.
Так как

то уравнение получится таким:
или
Пример оформления задачи №19.9.
Тело, имеющее форму половины кругового цилиндра, катается по горизонтальной плоскости без скольжения (рис. 19.20). Вес его . Положение центра тяжести определяется расстоянием  момент инерции относительно оси
момент инерции относительно оси  равен
равен 
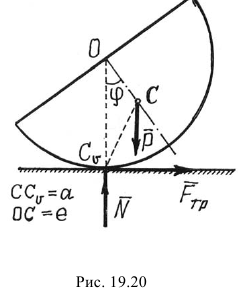
Поскольку неизвестны ни сила трения  , ни нормальная реакция
, ни нормальная реакция  , выгоднее составить дифференциальное уравнение вращения относительно оси по формуле (19.23). Момент инерции тела относительно оси по теореме Гюйгенса-Штейнера
, выгоднее составить дифференциальное уравнение вращения относительно оси по формуле (19.23). Момент инерции тела относительно оси по теореме Гюйгенса-Штейнера

а
поэтому

Расстояние

производная

Количество движения
Составляем дифференциальное уравнение (19.23)
После подстановки значения  получим
получим

или окончательно, подставив значение


Чтобы убедиться, что использованное здесь решение удобнее, стоит сравнить его с решением другим методом , которое заняло почти 1,5 страницы и где рассмотрен лишь только частный случай — малые колебания.
Пример оформления задачи №19.10.
Стержень качался как маятник, вращаясь в вертикальной плоскости вокруг шарнира . В момент, когда стержень был в вертикальном положении и угловая скорость его была  , шарнир разрушился.
, шарнир разрушился.
Определим дальнейшее движение стержня.
Стержень начнет совершать плоскопараллельное движение. На рис. 19.21 показано его промежуточное положение.
Составим дифференциальные уравнения движения (19.24) и (19.25).

или

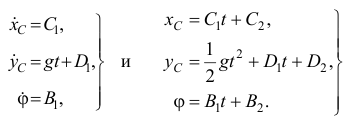
Начальные условия: при

Подставив их в последние шесть уравнений, найдем значения постоянных:


Тогда уравнения плоскопараллельного движения стержня будут

Например, стержень займет горизонтальное положение

в момент

когда центр масс его будет в точке с координатами
Дополнительные лекции
Основы теории колебаний
- Основные определения колебательного движения
- Малые свободные колебания системы
- Свободные колебания системы с учетом сил сопротивления движению
- Вынужденные колебания системы
Удар в механике
- Удар в теоретической механике
- Прямой центральный удар двух тел
- Удар по вращающемуся телу
- Ответы на вопросы по теоретической механике
Возможно эти страницы вам будут полезны:
- Предмет теоретическая механика
- Решение задач по теоретической механике
- Заказать работу по теоретической механике
- Готовые контрольные работы по теоретической механике
- Готовые курсовые работы по теоретической механике
