
Оглавление:


План скоростей и план ускорения
- Измерение скорости и планирование ускорения Спидометр представляет собой диаграмму, которая может графически определить скорость любой точки в виде в плане, который будет рассматриваться. Вы можете создать диаграмму скорости, если вы знаете a) направление скорости точки A на виде в плане и другой точки B на виде в плане, или b) скорость точки A на виде в плане и мгновенная угловая скорость плана известны.
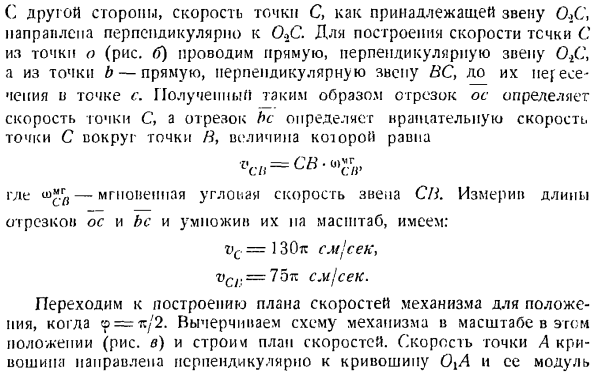
Механизм скорости также может быть создан для набора планограмм, которые образуют планарный механизм. // е.) Да.) Да. / / / К О. с.) Рис. 6.18. С другой стороны, скорость точки C, принадлежащей звену 0,»C» ориентирована перпендикулярно оси 0.2 C. To построить скорость течения эструса C из точки o (рис. 6), провести прямую линию, перпендикулярную звену OGC, провести прямую линию, перпендикулярную звену BC из точки b, и продолжать до тех пор, пока они не пересекутся и не станут точкой C. сегмент c, полученный таким образом, определяет скорость точки C, а сегмент be определяет скорость вращения точки C вокруг точки B, и его значение зависит от скорости вращения.
Здесь мгновенная угловая скорость звена NE. Людмила Фирмаль
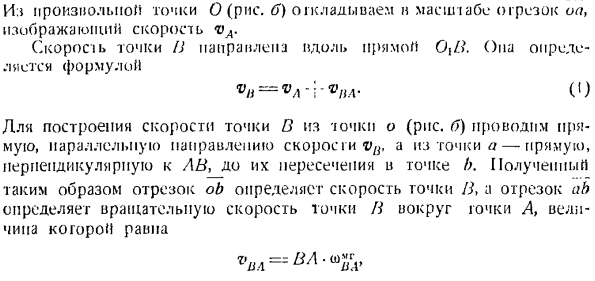
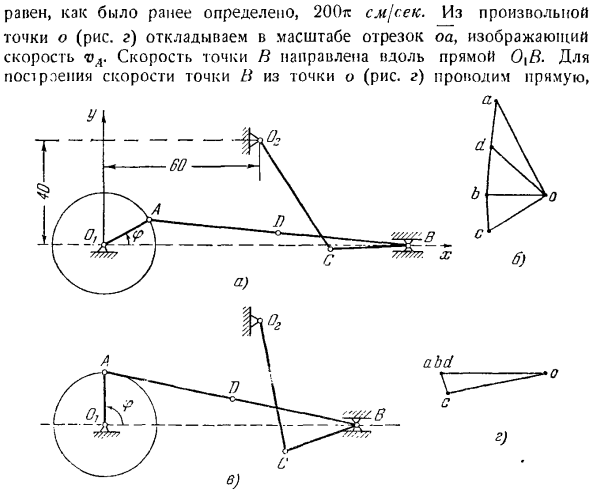
Измеряя длины отрезков oc и be, умножая их на шкалу, получаем: ВК = 1 ГКП cmj второй (ВКМ = лоз). см / сек если < p = — f / 2, то приступаем к построению спидометра механизма локации. Нарисуйте схему механизма на шкале в этом положении (рисунок С) и создайте спидометр. Скорость точки А кривошипа направлена перпендикулярно кривошипу Окса и его модулю. Равный, как было определено ранее, 200я см / сек. от любого Точка o (рисунок d)изображена на отрезке шкалы oa}, представляющем скорость vA. Скорость точки B направлена вдоль прямой 0 \ B. To построим скорость точки B из точки o (рисунок D), проведем прямую линию. \
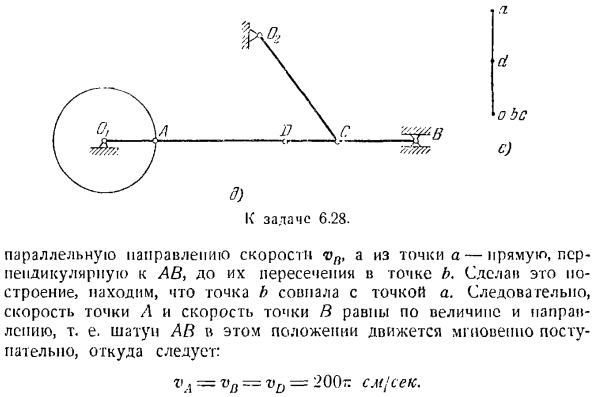
К задаче 6.28. Если мы создадим эту структуру параллельно направлению скорости vn, линию от точки A перпендикулярно AB, пока она не пересечется в точке b, мы увидим, что точка b совпадает с точкой A. следовательно, скорость точки A и скорость точки B одинаковы по величине и direction. In другими словами, шатун AB в этом положении будет переводиться сразу и двигаться оттуда следующим образом: vA = vn-vD = 200 см / с Скорость точки с направлена перпендикулярно звену 0.2 C.
- To построим скорость точки C из точки o (рисунок D), проведем прямую линию, перпендикулярную звену 0.Причем отрезок, полученный таким образом, определяет скорость движения точки С, а отрезок be определяет скорость вращения эстрального с вокруг точки В. v,=СВ * и > MG SN-cip Где u)^ — мгновенная угловая скорость звена CB. Измеряя длины отрезков oc и be, умножая их на шкалу, получаем: По качеству звука = 190tg см! S, vC / i = Zot: см / с. если <Р = 0°, то приступают к построению спидометра механизма location. In в этом положении нарисуйте механизм на шкале (рисунок С) и создайте спидометр.
Скорость точки А перпендикулярна кривошипу 0 \ А и равна 200;: см / сек. отклонение от любой точки о (рисунок е)!Масштаб сегмента, представляющего скорость vA. Скорость точки B направлена вдоль линии O ^ B и определяется по формуле (I). чтобы построить скорость точки B из точки o (рисунок E), проведите прямую линию, параллельную направлению скорости m) {1 и проведите линию, перпендикулярную AB, пока точка-точка B не пересечется.
После выполнения этой конфигурации вы можете увидеть, что точка b соответствует точке o. таким образом, скорость точки B будет равна пуле. Людмила Фирмаль
(«После выполнения этой конфигурации вы можете увидеть, что точка b соответствует точке o. таким образом, скорость точки B будет равна пуле. Это означает, что точка B является мгновенным центром скоростей в точке соединения стержня АВ. для. поперечного сечения скорость на КБ и модули 200 см / с скорость точки D в этом случае может быть найдено путем определения мгновенной угловой величины скорость шатуна АВ. В. 20071. shmg — — — — — секунды 1 м * АВ 100 л ’ Откуда? VD = BD•= 50,2 — = 100 см / с.
(2) согласно скорости точки C, которая принадлежит звену BC, является суммой скорости полюсов, точки B и скорости вращения вокруг точки B. С другой стороны, скорость точки C, которая принадлежит звену 04C, ориентирована перпендикулярно 0.2 C. To построить скорость точки C из точки o (рисунок E), нарисовать прямую линию, перпендикулярную звену 0.2 С и нарисовать прямую линию, перпендикулярную звену в BC от точки b до точки c, пока она не пересечется.
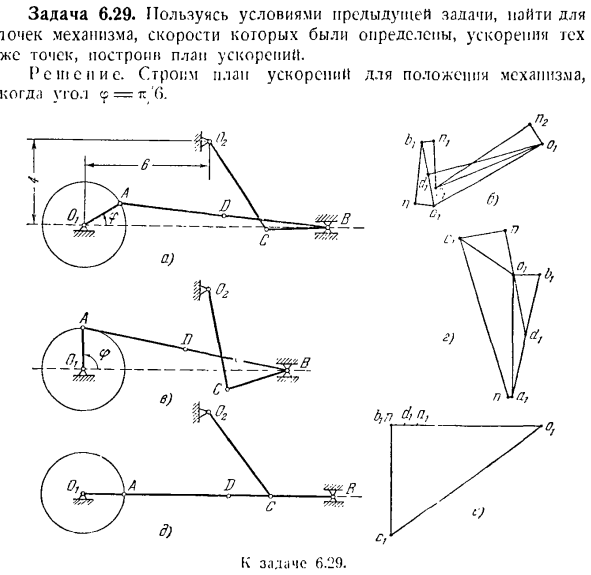
Если вы создадите эту структуру, точка c будет соответствовать точке o, поэтому скорость точки C будет равна нулю. Задача 6.29.Используя условия предыдущей задачи, найдите ячейку механизма, где определяется скорость, ускорение в той же точке и спланируйте ускорение. Rept и E. Мы создали план ускорения для положения механизма в случае угла 9 = rc’6. 1ХС до 6.29. Поскольку кривошип равномерно распределен, ускорение точки А становится нормальным, а его модуль равен WA = wnA =OtAш* = 20 = 2000r’2 см / С2.
Ускорение wA направлено из точки A В точку O. из любой точки oj (рисунок Tf) откладываем отрезок 0 | D|, равный ускорению до 0, на выбранную шкалу. Ускорение точки B направлено вдоль прямой Oj / J. Это связано с тем, что точка B движется линейно и равна сумме ускорения, ускорения вращения и центростремительного ускорения полюса при его движении вокруг полюса. Когда я получаю точку A полюса, это выглядит так: ЗП = УА + сл + w7A-
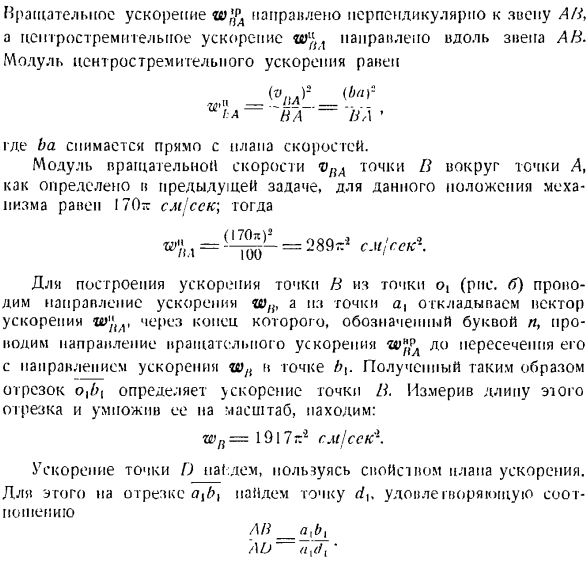
Вращательное ускорение w * npA направлено перпендикулярно lisp AB, а центростремительное ускорение wl / fA направлено вдоль звена A. B. модуль центростремительного ускорения поврежден Ф: А-а ~ ~ иль ba удаляется непосредственно из плана скорости. Определенный в предыдущей задаче коэффициент скорости вращения vnA для точки B с центром в точке A составляет 170 см / СЦ при определенном положении механизма.
И затем… = \ см сек \ Нарисуйте направление ускорения wH, чтобы создать ускорение точки B из точки Oj(рис. СШ {в точке B {.И это то, что мы получили. Отрезок 0 \ b \определяет ускорение точки B. Если измерить длину этого отрезка и умножить его на масштаб, то он выглядит так: ЗП = I9l7r4 см / ССК Точка I ускорение pa (: dem, используйте свойство плана ускорения). Для этого нужно найти точку r на отрезке и выполнить связь Ан _ л л АУ»,«,’
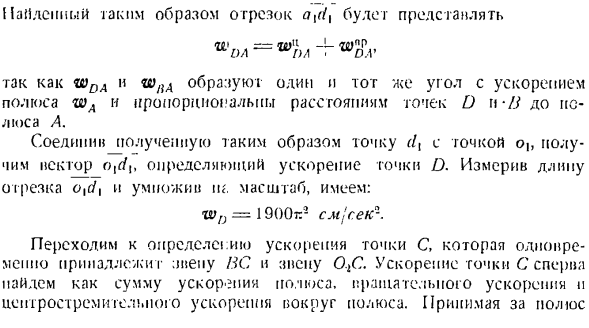
Таким образом, сегмент a \ d \ является это связано с тем, что wDA и w / iA образуют тот же угол, что и ускорение полюса wA и расстояние от точек D и B до полюса A. Объедините полученные таким образом точки y и o\, чтобы получить вектор, определяющий ускорение точки D. Измерьте длину отрезка и умножьте на n<.Мы: wn = 1900t: 2 см / сек Определите ускорение точки C, которая одновременно принадлежит звеньям BC и O + C. Ускорение точки C сначала определяется как сумма ускорения полюса, ускорения вращения вокруг полюса и центростремительного ускорения.
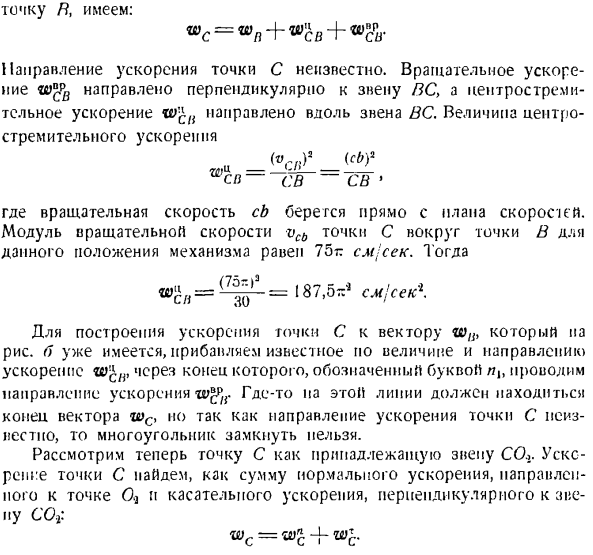
Возьмите шест Пункт B, мы имеем: «>С = ^ + wcfl + вкот- Направление ускорения в точке С неизвестно. Ускорение вращения wy? Блок Б?? Он направлен перпендикулярно оси C, а центростремительное ускорение направлено вдоль линии BC. Центростремительное ускорение СД-Св-Св ’ Скорость вращения cb контролируется непосредственно со спидометра. Скорость вращения точки C вокруг точки B относительно конкретного положения модуля механизма vcb составляет 75т: см / сек. и далее… = 187,5 * * см / с .
Если вектор Wl {i 6 уже существует для ускорения точки C, добавьте ускорение w’LV, размер и направление которого известны. С его конца нарисуйте направление ускорения, указанное буквой. Теперь предположим, что точка C принадлежит звену CO.Ускорение точки C рассчитывается как сумма нормального ускорения, направленного в точку 0.3, и касательного ускорения *, перпендикулярного звену CO.
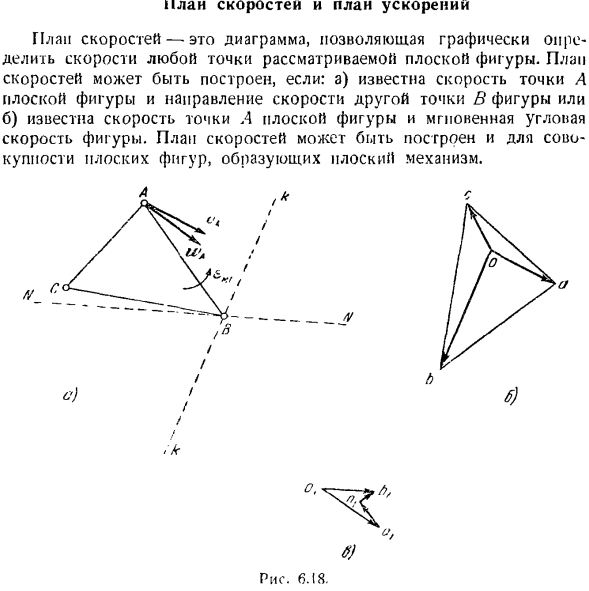
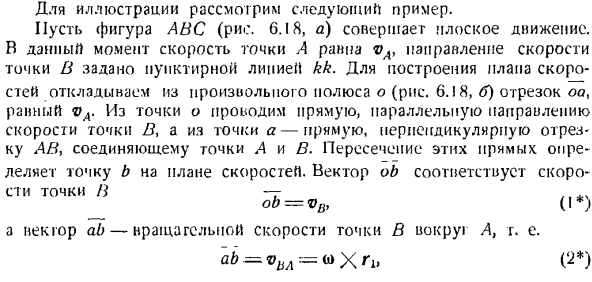
Туалет = 4 » Для иллюстрации рассмотрим следующий пример. Пусть плоскость движется на рисунке ABC (рисунок 6.18, a). в данный момент скорость точки A равна vA, а направление скорости точки B задается ломаной линией kk. Отложите отрезок oa, равный vA, от любого полюса o, чтобы создать план скорости (рис. 6.18, б).Проведите прямую линию, параллельную направлению скорости точки B от точки o, и перпендикулярную отрезку линии AB, который соединяет точки a и B. точка пересечения этих линий определяет точку B спидометра. Вектор ob соответствует скорости точки B-.
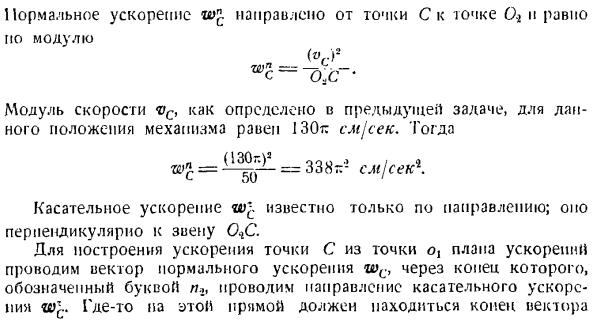
、 Оби = глаг,(я *) А шаг горы ab — это скорость вращения точки B вокруг точки A, т. е. АВ-ВБА = о> СР>(2 ) Обычное ускорение wnc направлено из точки C в точку O, равное модулю (П2 ЖНК-о \ с- < Модуль скорости, определенный в предыдущей задаче, составляет 130т: см / с при определенном положении механизма. И затем… ^ 2 = 11 ^ 1 = 338- * см / с *. Тангенциальное ускорение известно только в direction. It есть Перпендикулярно звену 0 * С.
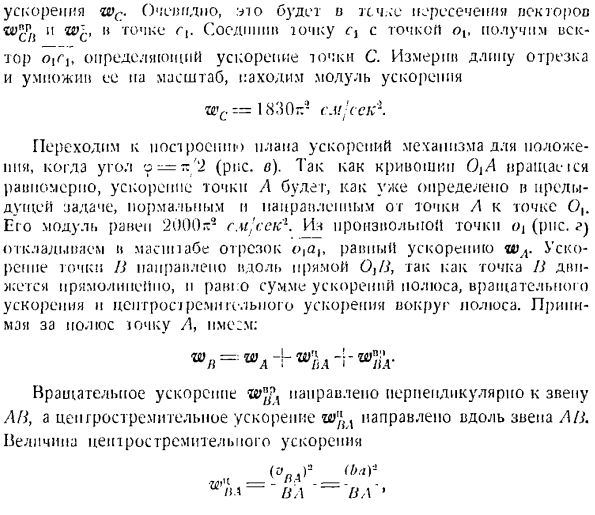
Чтобы построить ускорение точки C из точки o, являющейся планом ускорения, нарисуйте нормальный вектор ускорения w0, конец которого обозначен буквой n, и нарисуйте направление касательного ускорения Wp. Где-то в этой строке должен быть вектор копен Ускорение туалет. Очевидно, что это будет пересечение вектора wai и wb в точке ri. Если соединить ячейку cj с точкой o, то получим вектор o, r, определяющий ускорение C. Измерьте длину отрезка и умножьте его на масштаб, коэффициент ускорения РФ = W0n * см-сскк Приступаем к построению плана разгона механизма локации при угле o— » 2(Рисунок с).
Поскольку кривошип 0 {A однороден, ускорение в точке A является нормальным, как мы уже определили в предыдущей задаче, и направлено из точки A В точку O. его модуль равен 2000-4 см’sec1. 0 от любой точки [(рисунок?) Ускорение, равное wA, откладывает отрезок a, a на шкале. Ускорение точки / j направлено вдоль прямой O, / I. Это сумма ускорения полюсов, ускорения вращения вокруг полюсов и центростремительного ускорения: точка и движется по прямой, и совершает выпады. Точка L как полюс, PME: m: Вращательное ускорение направлено перпендикулярно звену an, а центростремительное ускорение wl} tA направлено вдоль звена LI. Центростремительное ускорение (a_4)2(б И » n = — fiA — = — a submarine ON-ON」
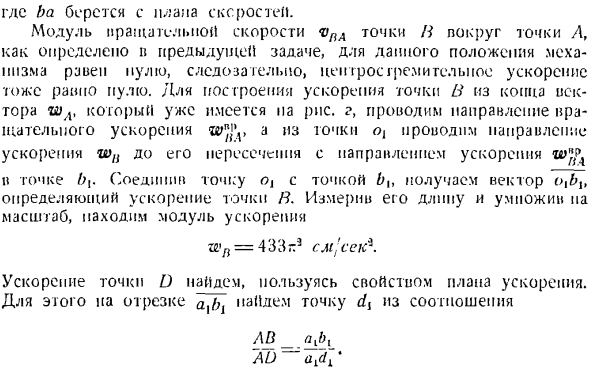
ба берется из плана скорости. Определенная в предыдущей задаче скорость вращения точки B вокруг точки A<модуль опа равен пуле определенного положения механизма, перегрузка равна telpos, а центростремительное ускорение также равно пуле. Построить ускорение точки B от конца вектора yil, уже существующего на рисунке y d, нарисовать направление вращательного ускорения w » l \ y и нарисовать направление ускорения wn от точки o до тех пор, пока оно не пересечется с направлением ускорения. Точка./>В.
Соедините точку o с точкой b, чтобы получить вектор otbu, определяющий ускорение точки B. определите коэффициент ускорения, измерив его длину и умножив масштаб. wn = 4 3 3 g9 см / с . Используйте свойство плана ускорения, чтобы найти точку D acceleration. To сделайте это, на отрезке, найти точку dj от отношения. А, б, яд. Затем определяется сегмент Объединив полученные таким образом точки OJ с точками dx, вы получите мучение, определяющее ускорение точки I).Определите коэффициент ускорения путем измерения длины отрезков o, y /и умножения его на масштаб компания WD = 1000— см! Считанные секунды.
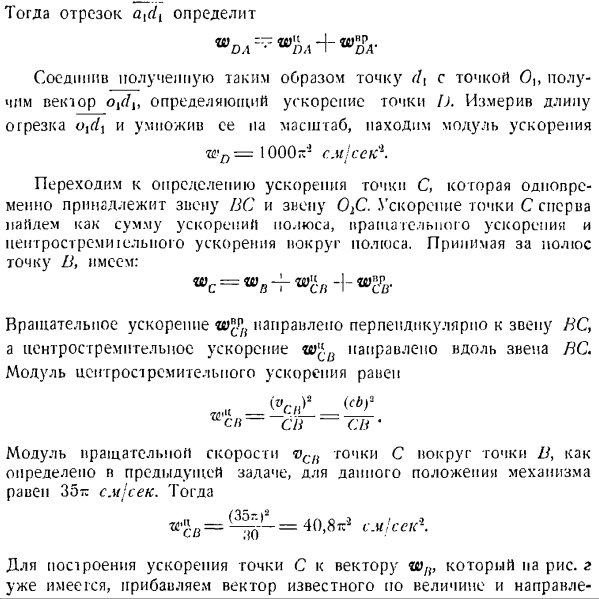
Перейдем к определению ускорения точки C, которая принадлежит одновременно звеньям BC и Ofi. Ускорение точки C сначала определяется как сумма ускорения полюса, ускорения вращения вокруг полюса и центростремительного ускорения. Когда я получаю точку / Y полюса, это выглядит так: туалет = ВБ + ж%п- \ Вращательное ускорение направлено перпендикулярно звену BC, а центростремительное ускорение wl£B направлено вдоль звена BC. Коэффициент центростремительного ускорения 「」 ШСП-СН-Си•
Как мы определили в предыдущем выпуске, модуль скорости вращения точки C вокруг точки V/ vCf для данного положения механизма составляет 35 см-сек. и далее… 40, смотри! Считанные секунды.\ Чтобы построить ускорение точки C к вектору wlt, показанному на рисунке C, добавьте вектор известных размеров и направлений, где g уже существует Ускорение через конец обозначается точкой a/», где-то в этой строке будет выполняться направление ускорения Конец вектора wc не может закрыть полигон, поскольку направление ускорения точки C неизвестно.
Здесь мы предполагаем, что точка C принадлежит звену CO4, и находим ускорение точки C как сумму нормального ускорения, направленного в точку O-i, и тангенциального ускорения, перпендикулярного 0±C. ®c= wc + аномальное ускорение направлено из точки C в ярмо 04, равное модулю Модуль скорости vc, определенный в предыдущей задаче, составляет 190 т: см / с относительно конкретного расположения механизма.
И затем… (190t 🙂 2, и ЗП. = 1 ′ = = 722k1 см / ССК. Тангенциальное ускорение известно только в направлении. Перпендикулярно звену 0.2 C. нарисуйте вектор через coed, чтобы построить ускорение точки C из точки o, которая является планом ускорения、 Рисует направление тангенциального ускорения w’q, обозначаемого буквой n}.Где-то в этой строке находится конец вектора wc. Очевидно, что это будет пересечение направления вектора и w^, то есть точки cj. Получаем вектор\ \ vector C, соединяющий точки с{точками.
Это определяет ускорение точки С. измерьте ее длину, умножьте ее на талисман и найдите коэффициент ускорения. туалет = 1300 ^ см / СКК . Приступаем к построению плана разгона механизма локации при угле 9 = 0°(рисунок е).Ускорение точки А по-прежнему равно 2000 см / Си направлено из точки А В точку О|.Из любой точки o (рисунок C) отложите отрезок, равный ускорению W l. Ускорение точки B направлено вдоль прямой 0 \ B}.Это происходит потому, что точка движется по прямой и равна сумме ускорения полюса, ускорения вращения вокруг полюса и центростремительного ускорения.
Когда я получаю точку A полюса, это выглядит так: Вт» — УА + Вяа- \ WTV по Вращательное ускорение wxjfA направлено перпендикулярно к звену AB, центростремительное ускорение wcentretal acceleration (vnAr нет. = — = —— ВИМ БА БА ’ ба берется из плана скорости. Как мы определили в предыдущей задаче, коэффициент скорости вращения точки B, центрированной в точке A, относительно конкретного положения механизма<oA, равен 200t: cm / s.
Чтобы составить ускорение точки B, нарисуйте направление ускорения w / {Из точки oX (рисунок E) и нарисуйте из точки A {ускорение w’} $ A. С этой буквой n выполните направление ускорения w * jfA до пересечения Направление ускорения wf в точке) Как видим, точка bx совпадает с точкой n, поэтому ускорение вращения равно нулю. Полученный отрезок o \ b {определить ускорение точки B. Измерьте длину этого отрезка и умножьте масштаб, чтобы найти коэффициент ускорения t0B = 24OOir9 см / sen ’ 1.
Используйте свойства плана ускорения, чтобы найти ускорение в точке D. Для этого в отрезке axbx (рисунок C) найдите точку dx из взаимосвязи. ЛВ _ остановка объявление {ДВ ’ Определите коэффициент ускорения путем измерения отрезков o, r /и умножения длины на шкалу wD-2200 * ’ 3 см / с *. BC link и 0.Возвращает к определению ускорения точки C, принадлежащей одновременно звену GS. Ускорение точки C сначала определяется как сумма ускорения полюса, ускорения вращения и центростремительного ускорения при движении вокруг полюса. Пункт B как Павел、
cb обратите внимание на план скорости. Модуль скорости вращения vcn в точке C вокруг точки/ V, определенной в предыдущей задаче, так как пуля повреждена для определенного положения механизма, ускорение центроплана также равно нулю. Ускорение вращения w’ffi. Диета была направлена перпендикулярно link. To построить ускорение точки с, проходит план ускорения точки в направлении ускорения wfy.
Где-то в этом направлении нужно поставить точку вектора ускорения wc. Поскольку направление вектора wc неизвестно, построение не может продолжаться. Теперь рассмотрим, что точка C принадлежит звену C04. Точка в C получается как сумма касательного ускорения и нормального ускорения Туалет — Ф- Нормальное ускорение — это длина от точки C до точки O*, равная Скорость, определенная в предыдущей задаче v0, равна нулю при определенном положении механизма, поэтому нормальное ускорение будет равно нулю.
Kacaie; ускорение в точке ibiioo C ориентировано перпендикулярно 02C. To настройте ускорение точки C через точку oX, используйте направление ускорения w’^.Где-то прям клей конец вектора туалет. Очевидно, что это будет w’C, или точка cv с неограниченным направлением ускорения Получаем вектор o, c, определяющий ускорение точки точки C, точки o и так далее.
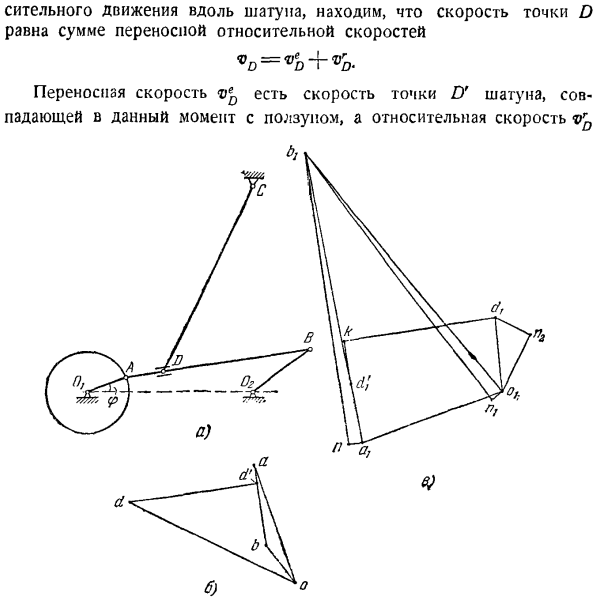
Измерьте его длину, умножьте масштаб и получите коэффициент ускорения туалет = ZOOOk ’ \ см ЕК \ Задание 6.30.Пожалуйста, определитесь! L кривошипно-шатунный механизм указывает A, B, D скорость и ускорение, создавая план скорости и ускорения(рисунок a).Кривошип OxL вращается с постоянным угловым углом. Размер связи 0) L = 40 / m} 0.0 ^ = 1 (H) см, L B = 180 см,0 * 8-70 см, DC = 200 см, угол? = — / < >. Решение. Мы создали скоростной план.
Скорость точки А направлена перпендикулярно кривошипу 0, А и равна по величине vA = O] L• » > = 40.30 = 1200 см * секунды А затем отложим отрезок {из любой точки o (рисунок 0), равный скорости vA массы/ w abs. Скорость шатуна точки в представляет собой геометрическую сумму скорости полюса и скорости вращения вокруг полюса. Когда я получаю точку A полюса, это выглядит так: ® / / =®л+ *- Где r-AB. на пик получил. 6.1, 18, (5 векторных треугольников Оби = ОА-1-АБ Соответствует уравнению распределения скорости ВБ = ва-irvDA. (3 *)
Мгновенная угловая скорость плана определяется непосредственно из шкалы скоростей Да.) — ±(4 ИГ АВ’ ^> Чтобы найти скорость точки C, то достаточно провести перпендикуляр АС из точки А перпендикуляр АС из точки B(рис. 6.18, ТФ).Пересечение этих линий определяет точки от спидометра. Сегмент Wasp представляет скорость точки C. Скорость точек на виде в плане, представленная заглавными буквами, рисуется на спидометре вектором, нарисованным от полюсов. До соответствующей точки, обозначенной строчными буквами,* ob означает, например, скорость точки B.
Схема ABC плана скорости аналогична плоской диаграмме ABC (рис. 6.18, а).Это происходит потому, что прямая линия (например, ab), обозначенная маленькой буквой в плане скорости, перпендикулярна соответствующей линии (AB) на плоской диаграмме. Таким образом, фигура abc похожа на ABC и поворачивается на 90 градусов в направлении вращения. План ускорения представляет собой диаграмму, которая позволяет графически определить ускорение любой точки На виде в плане, учитываемом account. An план ускорения может быть создан, если у вас есть план скорости, и вы знаете ускорение точки A на виде в плане и направление ускорения другой точки B на виде в плане.
План ускорения Скорость план скорость fd уже есть. Скорость вращения vl {A ориентирована перпендикулярно Шатуну AB. Скорость направлена перпендикулярно 0 * V. Чтобы построить скорость точки B, проведите прямую линию через точку o (рисунок B), параллельную скорости vl {, перпендикулярную от точки a до AB, и в точке b до ее пересечения. Сегмент b определяет точку B ci: opocib. By измерение длины сегмента b и умножение шкалы、 «j/} = 4f> 0 см / сек Сегмент ab определяет скорость вращения точки A вокруг точки B.
измерьте его длину и умножьте масштаб, он будет выглядеть так: vnA = 700 см / с Скорость ползунка D направлена перпендикулярно к коромыслу CD. С другой стороны, если рассматривать чертеж ползуна как составное движение, состоящее из Шатуна AB и подвижного движения、 Двигаясь вдоль шатуна, можно увидеть, что скорость точки D равна сумме переносных относительных скоростей. VED-это скорость точки D шатуна, которая на мгновение соответствует ползунку, относительная скорость vrD К выпуску 6. 30.
Скорость слайдера когда слайдер двигает вдоль ведущего шатуна. Переносная скорость veD является точкой D ’ скорость шатуна и в настоящее время определяется с помощью свойства, чтобы соответствовать ползунок. План скорости. Для этого отрезок A〜B на отрезки, пропорциональные к AD и DB Объявление _ объявление: Ж ~ д ’ 6 * Сегмент od затем представляет собой косую скорость ползуна D. Через найденную точку df нарисуйте направление относительной скорости<orD параллельно Шатуну AB и нарисуйте абсолютное направление от точки o
На пересечении d с направлением скорости vrD 8 точек от коромысла CD. Полученный отрезок od определяет скорость точки D. By измерив длину этого отрезка и умножив масштаб, можно увидеть, что: vD = 1780 см / с Приступайте к построению плана ускорения. Cranko] a вращается равномерно, поэтому ускорение в точке A является нормальным.
Вдоль кривошипа направлена из точки А В точку 0\, равную по модулю ва = охах. W * = 40,30 * = 36 000 см / с *. Из любой точки o (рисунок C) отложим вектор ojflj, равный ускорению wA на шкале. Вернемся к определению ускорения точки B, которая принадлежит одновременно звену B и звену O ^ B. Ускорение точки B, принадлежащей звену AB, является геометрической суммой ускорения полюса, центростремительного ускорения по направлению к полюсу и ускорения вращения вокруг полюса. Когда я получаю точку A полюса, это выглядит так: ВБ = ва + * » ба + СШ! Один.
Ускорение плана ускорения уже ва. Вращательное ускорение направлено перпендикулярно звену AB, центростремительное ускорение w ^ A направлено вдоль звена AB, и абсолютное значение равно ВУ =(1vl}!_ ВАЗ-АБ ’ Как мы уже определили, коэффициент скорости вращения точки в вокруг точки А составляет 760 см в секунду. И затем… Чтобы построить ускорение точки B в вектор wA, добавьте точку v и с ее конца нарисуйте направление ускорения w * Bpv, как указано точкой l. не допускается.
Теперь предположим, что точка B принадлежит звену Oa#и найдем ускорение точки B как геометрическую сумму нормального ускорения и касательного ускорения. ВБ = ВБ-размещение- Обычное ускорение wnB направлено либо в точку 0.2, либо В точку В, а абсолютное значение равно * «Си» wnB = BOl- Коэффициент скорости vD, как мы уже определили, составляет 460 см в секунду.
И затем… ^ = 1 ^ 1 = 3020 см \ сек \ Тангенциальное ускорение w’b известно в направлении и перпендикулярно 0,2 V. To построить ускорение точки B от точки плана ускорения, нарисовать вектор ускорения wnBi до конца, обозначенного буквой l и нарисовать направление ускорения wB. Где-то в этой строке будет конец вектора wB. Очевидно, что это на пересечении вектора и направления wxB> То есть в точке b.
Когда мы соединяем точку 0 и точку b, мы получаем отрезок off>и определяем ускорение wf. Измерьте его и повесьте шкалу, она будет wB = b \ 500 см / с Переходим к определению ускорения ползуна D. сначала рассмотрим движение ползуна как сложное движение, состоящее из соотношения движения движения, связанного с шатуном AB и относительного движения вдоль шатуна.
Ускорение ползунка D по теореме Кориолиса равно отношению, сумме относительного ускорения и ускорения Кориолиса. ЗП = накопители WD + WD с + БВ. Переносное ускорение, СР, является ускорением в точке D ’ шатуна и теперь согласуется с ползунком. Вы определяете его, используя свойства ускоренного plan. To для этого достаточно разделить отрезок ax на части, пропорциональные AD и DB плана{ускорения. Объявление _ а ^ ДБ д [б ’ Точка d [в сочетании с найденной точкой Oj таким образом можно увидеть ускорение точки D ’ шатуна, то есть переносное ускорение wcD. Действительно.
Wn = WA + WDA + WD? Ля> Вдоль отрезка{a \соответствует ускорение полюсов wA, а так как отрезок ajrfj равен сумме+、 Перейдем далее к определению ускорения Кориолиса. И модуль упругости СЖД == 2 * * ВР грех(<де з> р). Относительная скорость точки PG (vr) определяется из шкалы скоростей, и сегмент DD соответствует ей (рисунок B).Ее модуль yy = 1240 см, J секунд.
Переносная угловая скорость-это мгновенная угловая скорость шатуна. Ее модуль a)= VA-W-4 0 секунд ’1′ AB 180 C€K 4 Вт = 760. е. Так… wcL)= 2 * 4.2•1240 = 10 415 см / сек\ С тех пор грех (<ое ВР) = в Sin 90°= 1. Найдите направление ускорения Кориолиса. Относительная скорость точки D, vr, направлена вдоль шатуна из точки D в точку A. вектор (th) направлен перпендикулярно плоскости рисунка. Таким образом, согласно правилу Жуковского, кориолисово ускорение точки D направлено перпендикулярно AB. 。с.)
Относительное ускорение wrD, являющееся 3-й составляющей ускорения в точке D, направлено вдоль AB, но по модулю равно unknown. So … От конечной точки ускорения Кориолиса рисуется только точка / g, направление wriy. С другой стороны, если рассматривать точку D как точку, принадлежащую звену SD, то ее ускорение можно рассматривать как сумму нормального ускорения и тангенциального ускорения. Обычный коэффициент ускорения wnD является
Нормальное ускорение направлено из точки O в точку C. To построить ускорение точки D из точки ot плана ускорения, отложить вектор wnD и нарисовать направление ускорения w’D перпендикулярно звену CO, как указано буквой pi, до его конца. Где-то. Эта линия будет концом вектора wD. Очевидно, что эго-это вектор с wrD и wi. Is в точке пересечения, то есть d ^
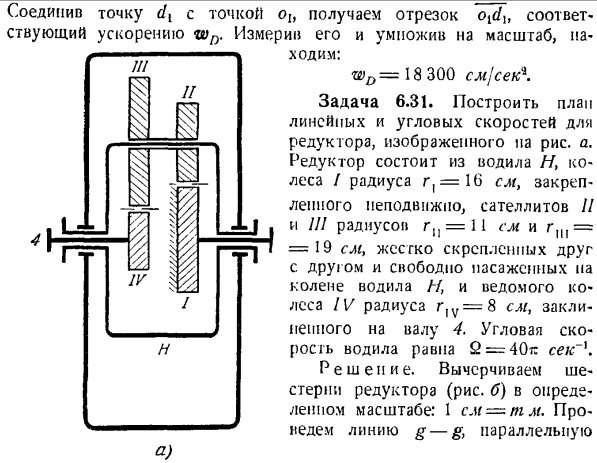
Соединительная точка d{точка ускорения wn. УЧЕНИЕ Н. /// > когда я получаю соответствующий сегмент o {dh и умножаю его на масштаб, он выглядит так: wd = 300 см \ сек \ Задача 6.31.План линейной и угловой скорости коробки передач показан на рисунке. a. редуктор состоит из несущей H, колеса / радиуса r, = 16 cm, фикчированного неподвижного, радиуса II и III,* =11 cm и gM. = = 19 они надежно скреплены друг с другом и свободно прикреплены к колену водила H, а ведомое колесо IV с радиусом rIV = 8 см забито на валу 4.Угловая скорость носителя равна Q = 40r секунд*. Решение.
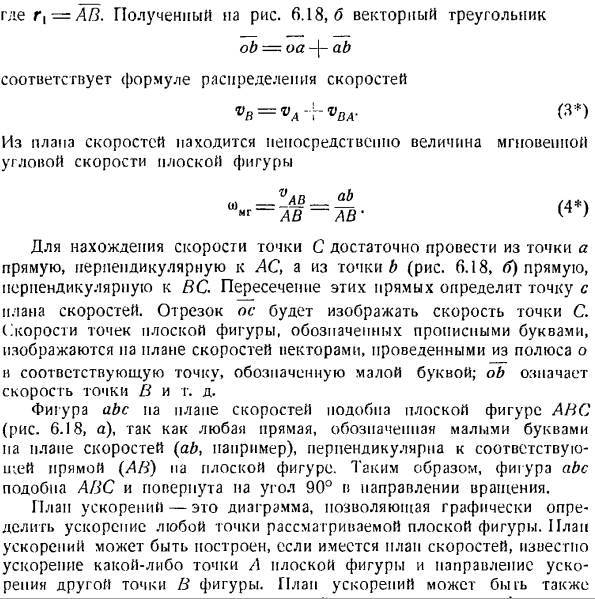
Нарисуйте шестерню редуктора (рис. B) в определенном масштабе:1 см = t м. параллельно линии g-g Я… Если вы знаете положение центра кривизны траектории любой точки B на рисунке, помимо спидометра и ускорения точки A в плане, build. To планируя ускорение, удобно использовать выражение для распределения ускорения в плоскопараллельном движении. ™D = WA-rW, BA’jrwz- (5 *) ВА Я Создайте план ускорения для того же плана этажа, предполагая, что вы знаете ускорение точки A и направление ускорения точки B (линия AW).Отложите ускорение от любой точки o, (полюсов) wA = otai.
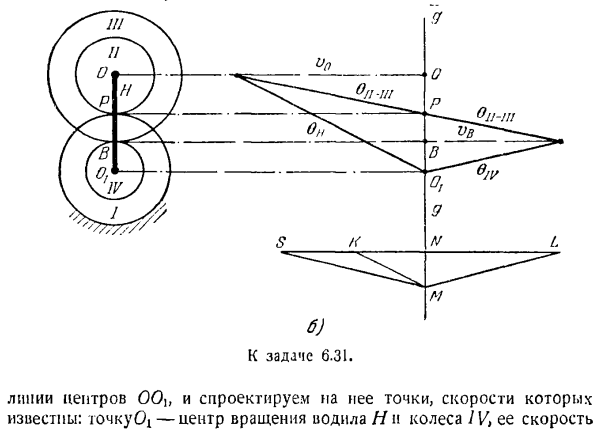
Далее определите центростремительное ускорение точки B при вращении вокруг точки A. Эн’ (6 *) ОО осевой линии и ее скорости известна расчетная точка: точка 04 является центром вращения колеса IV несущей Ян, его скорость ? «0 = 0, точка P-мгновенный центр вращения спутника II и III, скорость vp = 0, точка O-конец несущей I, а модуль версия v0 = м * 00,= 4он(0.16 О, я)= 33,8 м / с. Вектор v0 ориентирован перпендикулярно влево относительно несущей. Построить v0 относительно скорости по выбранному масштабу (1 см = / г м / с).
Соедините концы вектора v0 с центром вращения несущей, затем соедините Прямую линию 9.Продолжить линию Op_, m до направления скорости точки B и до точки пересечения. Их точка пересечения определяет скорость vB. Зная скорость точки B и положение центра вращения колеса IV, проведите прямую линию 6, где v>обозначает распределение скорости колеса I V. После создания плана линейной скорости можно определить угловую скорость всех элементов gearbox.
To для этого в продолжении линии g-g выделите любую точку N, а оттуда отложите отрезок NM любой длины c (в нашем примере c = 1 см).Из точки M нарисуйте линию: yWS параллельно 0WS||/, ML параллельно 6JV, KM параллельно 0/7. 30К. NS = 4.1 сегмент шкалы c дает модуль угловой скорости спутника II-III единиц оборотов. 4.1-30. к 4.1-30. 6.55 пи.11 = — r — = — lh — = 2560 об / мин、 »- в k-m −1 k•0.1 * I Или масштаб-модуль угловой скорости (рад / сек) «, „==270 секунд-*. 11-111 ТФ 0.1 * 1
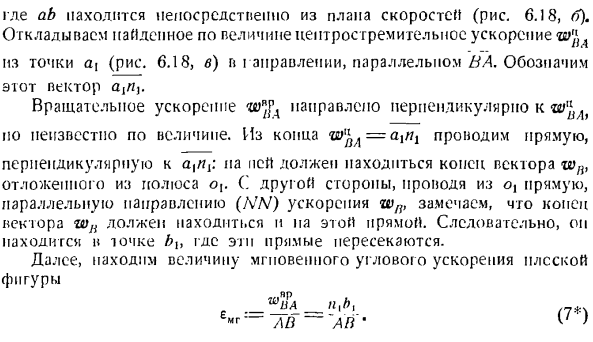
Линия M на правой шкале,= 3,8 см дает значение 3.8-30-6.55 LLCA p, v = • — Q ^ / — = 2380 об / мин、 ^ y = TLTG = 248 Отрезок L / C = 1,9 см дает значение угловой скорости несущей I 1.9 от 30 до 6.55 1 PLL (pi = Q {- j — ^ 1200 об / мин •“- ■Кто?- 1912. Результат расчета зависит от точности конфигурации и измерения величин графика. Допуск составляет 2° / o- ab получается непосредственно из спидометра (рис. 6.18, p).Перенос центростремительного ускорения на wyiA От точки а (рис. 6.18, в) контроль мне параллельно БА. Этот вектор a/Л / показан. Вращательное ускорение Размер неизвестен. Куча w ’ / l) нарисуйте прямую линию от A = a1 / i1 перпендикулярно aup {: должен быть вектор wH Copen от полюса O.
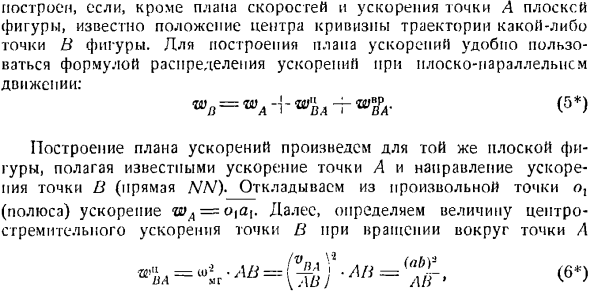
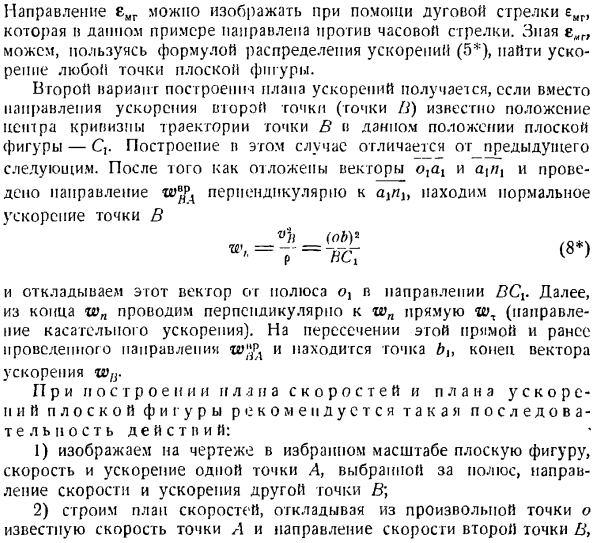
So, эти линии располагаются в точке L, где они пересекаются. Затем найдите мгновенное угловое ускорение плана этажа мг * — АВ ’1′ направление ЭМГ может быть представлено в этом примере с помощью стрелки против часовой стрелки medou emg. после того, как вы знаете smg, вы можете использовать формулу распределения ускорения (5*), чтобы найти ускорение любой точки На виде в плане. Если вместо направления ускорения 2-й точки (точки B) мы знаем положение центра кривизны траектории точки B в заданном положении на плане, то получаем конфигурацию плана ускорения— Cj.
Структура в этом случае отличается от предыдущей следующим образом: после того, как векторы axax и A {nx отложены и направление w ^ pA нарисовано перпендикулярно axnxi, Нормаль фут Р\НС^’ И отложите этот вектор в направлении от полюса o к BCX. Затем нарисуйте линию, перпендикулярную WN (направление тангенциального ускорения) от конца wn. At пересечение этой линии и ранее нарисованного направления w » fA、 Ускорение WN. При использовании plan и plan plans для построения плана、
Затем выпрямите прямую линию от конца vA до AB, пока она не пересечет направление скорости B. 3) далее найдите мгновенную угловую скорость фигуры, а затем отложите скорость вращения перпендикулярно прямой линии, соединяющей точку с полюсом A, наращивая скорость любой точки на фигуре или наращивая скорость любой другой точки в плане; скорость вращения пропорциональна расстоянию от точки до полюса A. 4) составить план ускорения, исключив известное ускорение любой точки О, точки А из головного-центростремительное ускорение, и начертить направление вращения через Комен®ум
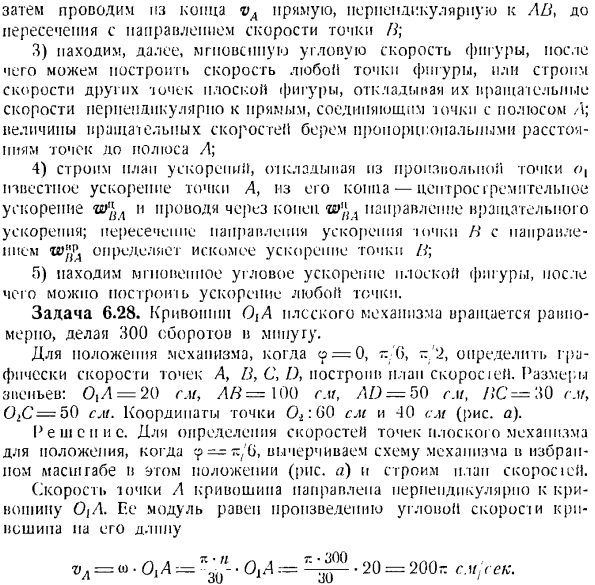
Ускорение; пересечение папье-Пия с направлением ускорения точки определяет искомое ускорение точки B ’、 Г)) найдя мгновенное угловое ускорение плоской фигуры, можно создать ускорение любой точки. Задача 6.28.Плоский кривошип механизма O, L вращается равномерно, 300 оборотов в минуту. Для расположения механизма, если o = 0, −6, графически определите скорость движения точек A, B, C, D и постройте план как можно быстрее. Размер ссылки: 0, L = 20 см, AB = 100 см, AD = 50 см, BC = 30 см, OtC = 50 см.
Координаты точки Og: 60 см и 40 см(рисунок а). Решение. Чтобы определить скорость движения точки плоскости расположения механизма в случае 9 = m :, G, нарисуйте схему механизма на шкале, выбранной в этом положении (рисунок L) и составьте план как можно скорее. Скорость вращения коленчатого вала A направлена перпендикулярно кривошипу 0) L. Его модуль равен произведению угловой скорости кривошипа и его длины ВА = В. О, Л= *••О, Л. 20 = ШГ. см: секунды Из любой точки O (рисунок B) на шкале также отображается отрезок oa, представляющий скорость vA.
Скорость точки B направлена вдоль прямой 0,/> \это формула = С) Чтобы построить скорость точки B из точки o (рисунок B), нарисуйте прямую линию, параллельную направлению скорости qd и нарисуйте прямую линию, перпендикулярную AB из точки a, пока она не пересечется в точке B. полученный таким образом сегмент ob определяет скорость точки VU, а сегмент ab определяет скорость вращения точки B вокруг точки A. ®да= АУ ’% л>
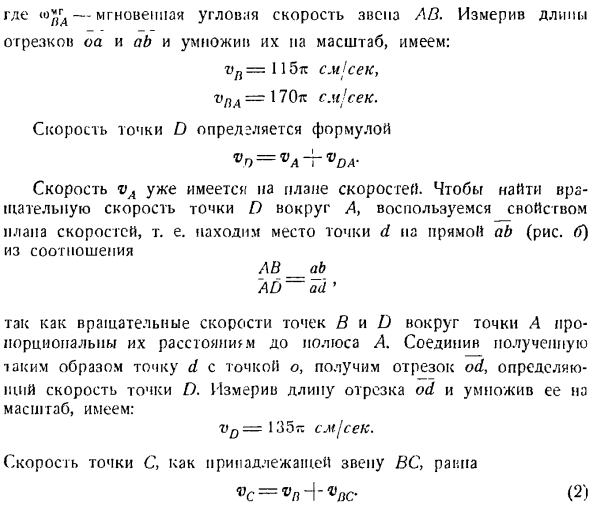
Где co-мгновенная угловая скорость звена AB. By измеряя длину отрезков oa и ab и умножая их на масштаб, получаем: — 11см / с, вна-1707: см! С. Скорость движения точки D определяется по формуле Speedva уже включена в план скорости. Чтобы найти скорость вращения точки D вокруг A, используйте график скорости property. In другими словами, найдите расположение точки d на линии ab (рисунок Tf) из соотношения В B_ab Реклама’
Поскольку скорость вращения точек B и D, центрированных в точке A, пропорциональна расстоянию до полюса A, мы объединяем точки d и o, полученные таким образом, чтобы получить линейный сегмент od, который определяет скорость точки D. Если мы измерим длину линейного сегмента od и умножим его на масштаб、 135 ^ см / с Звено Солнца, скорость точки с, принадлежащей райне ВК = ВН + с VNC. (2)
Смотрите также:
Предмет теоретическая механика
