
Оглавление:


Определение положений механизма
- ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЙ МЕХАНИЗМА Как мы знаем, любой механизм I класса 2-го порядка, не содержащий высших пар, независимо от его сложности может быть образован путем последовательного присоединения к основному механизму I класса 1-го порядка двухповодковых групп. Для любого заданного положения
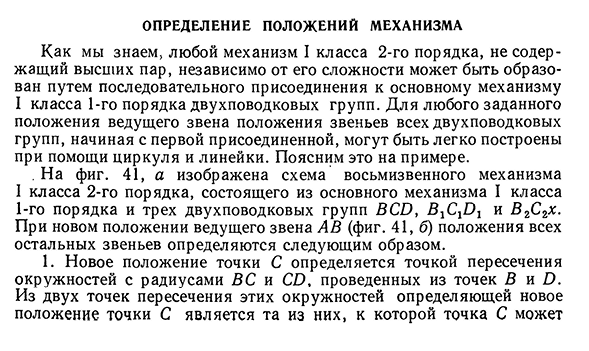
ведущего звена положения звеньев всех двухповодковых групп, начиная с первой присоединенной, могут быть легко построены при помощи циркуля и линейки. Поясним это на примере. . На фиг. 41, а изображена схема восьмизвенного механизма 1 класса 2-го порядка, состоящего из основного механизма I класса 1-го порядка
и трех двухповодковых групп BCD, B1C1D1 и В 2С2х. При новом положении Людмила Фирмаль
ведущего звена АВ (фиг. 41,6) положения всех остальных звеньев определяются следующим образом. 1. Новое положение точки С определяется точкой пересечения окружностей с радиусами ВС и CD, проведенных из точек В и D. Из двух точек пересечения этих окружностей определяющей новое положение точки С является та из
них, к которой точка С может28 Кинематический анализ плоских механизмов подойти при непрерывном движении звена АВ от начального положения. 2. Новое положение точки Вх определяется ее неизменными расстояниями от точек С и D. Cj определяется точкой пересечения Фиг. 42. 3. Новое положение точки окружностей с
- радиусами В1С1 и C1D1. 4. Новое положение точки В2 определяется ее неизменными расстояниями от точек иО Р 5. Новое положение точки С2 определяется точкой пересечения прямолинейной направляющей поступательной пары с окружностью радиуса В 2С2. Цля определения
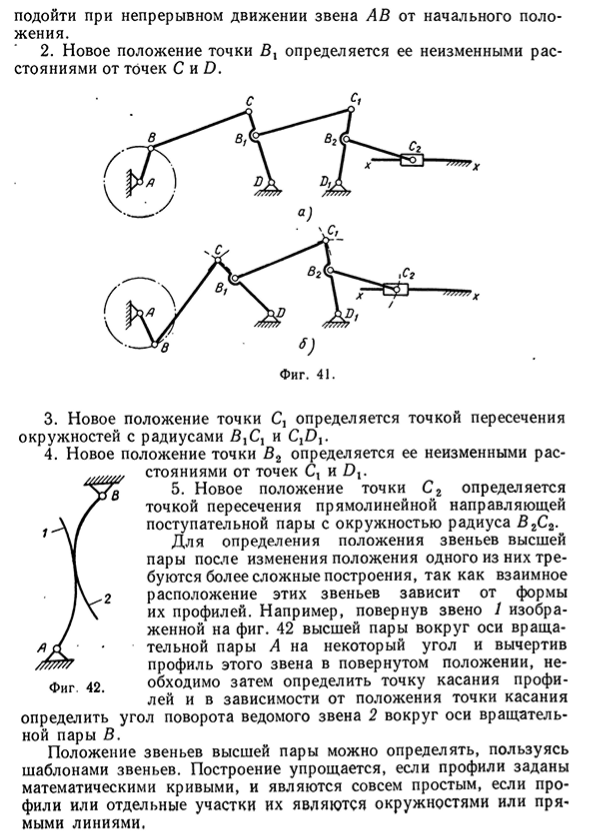
положения звеньев высшей пары после изменения положения одного из них требуются более сложные построения, так как взаимное расположение этих звеньев зависит от формы их профилей. Например, повернув звено 1 изображенной на фиг. 42 высшей пары вокруг оси вращательной пары А на некоторый угол и вычертив профиль этого звена в повернутом положении, необходимо
затем определить точку касания профилей и в зависимости от положения Людмила Фирмаль
точки касания определить угол поворота ведомого звена 2 вокруг оси вращательной пары В. Положение звеньев высшей пары можно определять, пользуясь шаблонами звеньев. Построение упрощается, если профили заданы математическими кривыми, и являются совсем простым, если профили или отдельные участки их являются окружностями или прямыми линиями.
Смотрите также:
Предмет Теория Машин и Механизмов ТММ
| Наиболее распространенные виды механизмов | План скоростей |
| Кинематический анализ плоских механизмов предварительные сведения | План ускорений |
