
Оглавление:


Однородные пространства в физике
- Однородные пространства. Допущения однородности пространства и изотропии Определите метрику полностью (оставьте ее свободной) Символ кривизны). Значительно больше свободы осталось до Нет положений об однородности только пространства, нет Другая дополнительная симметрия.
Рассмотреть проблему Примерно такие же характеристики измерения Пространство. Давайте поговорим о пространственных метриках. Учитывая время т. о Пространственно-временная система отсчета выбирается синхронно, т — все синхронизированное пространство Время. Однородность Все точки пространства.
Связанный с рассмотрением множества преобразований координат Людмила Фирмаль
Точное определение этого понятия nat, соединяет пространство с собой. Не изменяйте показатель: если перед преобразованием есть элемент длины dl2 = 7 a / ^ (x1, x2, x3) dxa dx @, Затем после преобразования того же элемента dl2 = ‘Va / Zh xf2, xfS) dx, a dx’P
Имеет такую же функциональную зависимость, как 7 a ^ от новых координат туземный Если вы принимаете целое, пространство однородно Трансформация (или группа упражнений, как говорится), Объединить любую точку с другими точками Точка.
- Из-за трехмерной природы пространства, Эта другая групповая трансформация должна быть определена Три независимых значения параметров. Следовательно, в евклидовом пространстве выражается однородность Метрическая инвариантность для параллельных ne Рено декартовой системы координат (перевод).
каждый Трансляция определяется тремя параметрами-компонентами Ми вектора смещения в начале координат. Все эти преобразования Три независимых производных остаются неизменными la (dx, dy, dz), из которого построен элемент длины.
он не может быть сведен ко всем различиям Координатная функция Людмила Фирмаль
Общее неевклидово пространство Формирование его группы движения также остается неизменным 3 независимых линейных дифференциальных формы, Тем не менее, . Запишите эти формы в форму Пример> dxa, (116,1) Где латинский индекс (а) — это три независимых ссылочных номера Вектор (функция координат).
С формой (116.1) она неизменна. Группы движения, пространственные метрики строятся следующим образом dl2 = Vab (e ^ dxa) (e ^ dx13), (116,2) Другими словами, метрический тензор 7a / 3 = детка ^, (116,3) Где коэффициент r] симметричен относительно индексов a и b, является функцией.
С течением времени. Следовательно, это будет выражение «триада» Пространственные метрики, использующие тройки опорных векторов Хори, это выражение относится ко всему, что приобретено в § 98 Формула. Выбор опорных векторов, Симметрия пространства и, вообще говоря, эти векторы Не ортогонально (матрица m] ab не диагональ).
Введем тройку с тройкой вектора e $, как в §98 Взаимный вектор е ^ = th (11 6 .4) В 3D отношения между ними и другими векторами Можно выразить явно как е (1) = ^ [е (2) е (3)], е (2) = ^ [е (3) е (1)], е (3) = ^ [е (1) е (2)] , (116,5) где v = | 4 a) | = (е ^ [е ^ еЩ), В (a) и e (a) вам необходимо понять метод декартовых векторов с использованием компонентов.
Детерминанты насекомых, е ^ и е ^ \ метрика соответственно Тензор (116,3) 7 = r) v2 (116,6) Где r] — определитель матрицы r] ab. Инвариантность дифференциальной формы (116.1) какие e ^ \ x) dxa = e ^ (x ‘) dx, a, (116,7) Кроме того, е ^ с обеих сторон уравнения является той же функцией Из старых и новых координат соответственно.
Умножьте это ра e ^ (x ‘) равенство, dx’ @ = (dx ^ / d ha) замещение и сравнение коэффициентов Коэффициент того же дифференциала dxa, я ^ = е? а) (* ‘) 4е) (*) — (116-8) Эти равенства являются дифференциальными системами Уравнение, которое определяет функцию xf @ (x) по данному эталону Вектор 1).
Уравнение, чтобы сделать его интегрируемым Уравнение (116.8) должно удовлетворять тому же условию 0 В * = 0 В * дхадх7 дх ^ дха * Когда производная рассчитывается, она становится ihd ^ x () a- <u [-4,) 0e ‘) — * b) (x’) — e ^ a) (x ‘) ef (x) e \ x) = = (A) oO де ^ \ х) де ^ \ х) дха дх1 \ Умножим обе части уравнения на e ^ (x) ejc ^ (x) e ^ \ xf) Рассмотрим различие от одного фактора к другому Получить объем (116,4) на левой стороне.
4 V) dx, s e (s) Yx) Qx, s e (d) Kx) = e {pc) (x ‘) e \ d) (x’) rS e ^ V) de ^ jx ‘) dx «dhf] • И та же формула, что и функция right-x. с того времени Поскольку x и xf произвольны, эти уравнения Постоянный: (С) Ях (ы) \ дха) (a • r (b) = ссаб • (116,9) Константы Ccai называются структурными константами Группа. Умножьте ejcy, чтобы переписать его в следующем формате (116.9) (B) dx13 ~ ab (c) ‘ (116,10)
Это желательные условия для пространственной однородности. вы Выражение в левой части уравнения (116.9) соответствует определению По количеству \ sa (98.10), следовательно Постоянная. По определению постоянная антисимметричной структуры По нижнему индексу: CCaB = ~ C CBa • (116,11)
Еще одно условие для них можно получить, отметив, что Свойство (116.10) эквивалентно правилу переключения [Ха, xb \ EXXX-XxXa = Ccxxc (116,12) Для линейного дифференциального оператора 1) X. = <? „) Ј. (116.13) И упомянутые отношения возникнут из идентичности [[Xa, Xb] Xc] + [[Xb, Xc] Xa] [[Xc, Xa} Xb} = o (Так называемая идентичность Якоби) и форма CfabCdcf + CfbcCdaf + С * tС% = 0. (116,14)
Явное преимущество перед коном из 3 индексов Станция SSA представляет половину двух индексов Может быть продублировано двойным преобразованием СсЪ = eaMCdc, (116,15) Где eabc = eabc — единичный асимметричный символ (и ei23 = +1) — правило переключения с использованием таких (116.12)
Константа eabcX bc = CadX d. (116.16) Свойство (116.11) уже было учтено в определении (116.15) Принимает форму (116.14) ebcdCcdCba = 0. (116,17) Также определение Ca (116,9) Подарок в векторном формате CaB = -e (a) ro te (6), (116,18) В Опять же, векторные операции выполняются так, как если бы Координаты га были декартовыми.
Выберите три опорных вектора в дифференциальной форме max (116.1) (и их оператор Xa), конечно, не одно значение Вы можете выполнять линейные преобразования, используя постоянные коэффициенты Чена. e (a) = A bae (b). (116,19) Для таких преобразований величины r] a b и Ca b Действует как тензор. Только условие (116.17) должно быть выполнено Создайте структурную константу Ca3.
Но разрешено Эти условия для постоянных множеств эквивалентны То есть разница связана только с преобразованием (116.19). Проблема классификации однородных пространств Определить все неэквивалентные наборы структур Constant. Это можно сделать с помощью «тензоров» Свойства стоимости кабины следующим простым способом (С. Г. Бер, 1962).
Асимметричный «тензор» Ca3 можно разложить симметрично Симметричная и асимметричная части. первый pa3, второй представлен двойным «вектором» ac. CaB = paB + eaBacas. (116,20) Замена этого выражения на (116.17) приводит к условию paa = 0 (116.21) По преобразованию (116.19) тензор симметрии ра Можно уменьшить до диагонали.
Пусть ni, n2, pz- Его основное значение. Равенство (116.21) Торус aj (если присутствует) является основным «Тензор» pa3 плата-соответствует нулю Основная ценность. Так что не теряя общности Введите а = (а, 0,0). Затем (116.21) становится \ = 0. Либо a, либо ni должны быть равны нулю.
Правила Переключение (116.16) принимает следующую форму: [Xi X 2] = -a X 2 + n3X s, [X2, X 3] = n 1X и [X3, X 1] = n 2 X 2 + aX3. [б * ж Тогда еще есть свобода менять знаки оперы Тори Ха и его произвольный масштаб преобразования (Умножить на постоянную). Это позволяет одновременно Измените знак всех ni, n2, pz, а также создайте значение Жизнь (если не ноль).
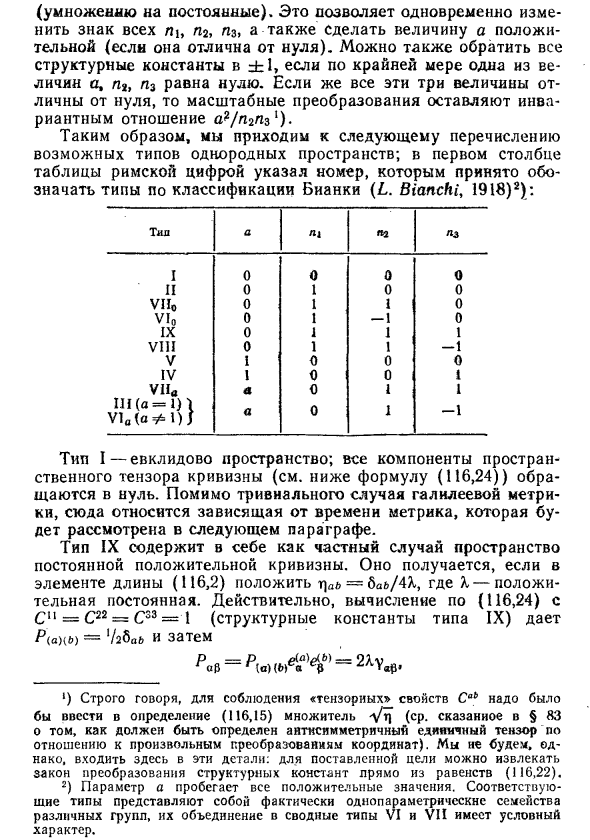
Вы также можете нарисовать Хотя бы одна структурная константа в = b1 Величины a, n2 и pz равны нулю. Если эти три величины не все равны нулю, преобразование масштаба остается инвариантным a2 / n 2 ‘n ^ 1). Итак, мы дошли до следующего перечисления Возможный тип однородного пространства, в первом столбе Римские цифры указывают на допустимые числа
Укажите тип в соответствии с классификацией Бьянки (L. Bianchi, 1918) 2): Введите ni n2 Pz Я 0 0 0 0 II 0 1 0 0 VIIo 0 1 1 0 VIo 0 1-1 0 IX 0 1 1 1 VIII 0 1 1-1 V 1 0 0 0 IV 1 0 0 1 Vaa a 0 1 1 III (а = 1) V ia (a / 1) J 0 1-1 Тип I — евклидово пространство. Все составляющие пространства Тензор кривизны (см. Уравнение (116.24) ниже) Будет отключен. В дополнение к тривиальному случаю Галилея Рики, это включает метрики, зависящие от времени.
Описано в следующем абзаце. Тип IX включает в себя специальное пространство Постоянная положительная кривизна. Оказалось, Длина элемента (116,2) положена, м] ab = 5ab / 4A, где A-положена Настоящая постоянная. На самом деле, расчет по (116.24) C 11 = C22 = C33 = 1 (структурная постоянная типа IX) P (a) (b) = (! / 2) ^ ab и P a p = P (a) {b) e a ^ = 2 ^ 7 a / 3 Соответствует только указанному пространству (Ср. (111,3)).
Точно так же постоянная пространства отрицательна Кривизна включена как частный случай типа V. Фактически, положение T] ab = Sab / \ и P (a) (b), рассчитанное по (116.24) C23 = -C32 = 1 P (a) (b) = «2 $ ab, Pa (3 = aЈ, Это соответствует постоянной отрицательной кривизне. Наконец, уравнение Эйнштейна Мир с единообразным пространством сводится к нормальной системе Новые дифференциальные уравнения, включающие только Функция времени.
Для этого пространственная составляющая 4 вектора и 4 тензора должны быть разложены на 3 ссылки Вектор этого пространства: ба) (б) = # а /? Efa) efb) ’R 0 (a) = ^ 0 ve« o) и (a) = UaeЈ \ Кроме того, у всех этих величин уже есть только следующие функции: Ј; функция времени также является скалярной величиной Проблема плотности энергии е и давления с.
Уравнение Эйнштейна в синхронной системе Согласно (97.11) — (97.13), через трехмерный тензор xa / # и пап. введение * (A) (b) = Vab, xfa) = VacV ^ (116,23) (Точка означает производную по t). Компонент Однако P (a) (b) можно выразить через m] ab и структуру. Групповая константа с использованием (98.14).
После обмена трехиндексный \ abc = саквояж к двухиндексной кабине и серии Преобразование 1) получаем P $ = ^ {2cbdc! Реклама + CdhCad + ChdCda-Cdd (Cba + Ca) + + Sab [(Cdd) 2-2 C dfCdf}}. (116,24) Здесь, следуя общим правилам, Ca b = G1acCb, Ca b = T] acmdCCd. Кроме того, Бьянки тождество 3D-тензора Рар в едином пространстве принимает форму РЈСЬса + P caCbcd = 0. (116,25)
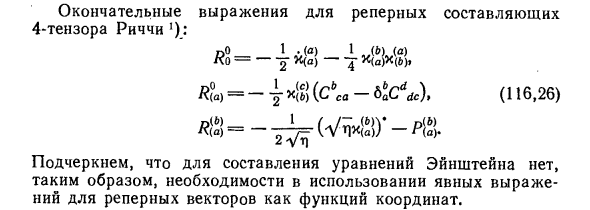
Ссылочный компонент конечного выражения 4-богатый тензор 1): Подчеркните, что уравнение Эйнштейна не готовится. Следовательно, необходимость явных выражений Для опорных векторов как функции координат.
Смотрите также:
| Красное смещение в физике | Плоская анизотропная модель |
| Гравитационная устойчивость изотропного мира | Колебательный режим приближения к особой точке |
