
Оглавление:


Общие теоремы, выводимые из принципа возможных скоростей
- Сообщение позволяет поступательному движению системы параллельной к оси. Предположим, что муфта позволяет всей системе перемещаться параллельно оси. Основные уравнения статики 2 X,+ Z, 6 gm = 0. Для некоторых рассматриваемых перемещений он применяется к этой системе si,= 0,= 0, 3l = ox2… = bxn. Если мы возьмем общий фактор 6xv 2, =прибл. Поэтому для равновесия системы необходимо, чтобы сумма проекций на ось Ox, учитывающая непосредственно приложенную силу, была равна нулю. Ссылка позволяет вращать систему вокруг своей оси. Предположим, что соединение позволяет повернуть всю систему вокруг своей оси. Его принимают за ось OZ.
Примем за начало О точку закрепления, расположенную более низко, и направим ось х таким образом, чтобы вторая точка закрепления Р находилась в квадранте между положительными координатными осями. Людмила Фирмаль
Полярная координата проекции точки, обозначенной rv и 6 xv, A zj к плоскости xOy х,= р, cosOv, г, = rvsin6. Чтобы представить, что система получает рассматриваемое смещение, необходимо сделать Z и z постоянными и изменить все полюсные углы 6 на одно и то же значение 66.Таким образом, для 3xv, By, вы получаете значение 6x,= r sin 6.36 = Л б, Зл = х оо, ЗГ, 0. Сумма возможных работ силы, приложенных непосредственно к этому конкретному движению, равна 2, г г, 8А + 2.02, = о 2 х,. То есть равна произведению 69 на сумму N моментов силы, приложенной непосредственно к рассматриваемой оси. Для равновесия необходимо, чтобы эта сумма N была равна нулю.
- Таким образом, мы видим, что понятие момента вокруг оси вводится наиболее естественно. Ссылка позволяет перемещать всю систему с помощью винтов. Предполагается, что ось Oz является осью спирального движения. 60 минимальный угол, на котором система вращается вокруг оси Ozt, а Zz величина скольжения вдоль этой оси. Поставьте 3z = 30, и назовите его параметром движения винта.
Поскольку бесконечно малое смещение каждой точки в системе является геометрической суммой вращательных и скользящих перемещений, сумма возможной работы сил, приложенных непосредственно, индивидуально равна сумме работы каждого из этих перемещений. Об этой сумме = 82 2 + 86 2 х, т, м, х, = 86 н + з Где сумма моментов на оси OZ, а Z сумма проекций на эту ось. Таким образом, для равновесия необходимо, что это З + З = О. Обратите внимание, что формула представляет собой вектор относительных моментов 2 систем.1 настраивается непосредственно приложенной силой, а другой 1 центрируется осью, ключевым вектором 30 и минимальным моментом Зг = 80 сек.28 с осевой осью винтового движения.
Уравнение цепной линии содержит три постоянных лг0, у0, а, которые определяются из условий на концах. Людмила Фирмаль
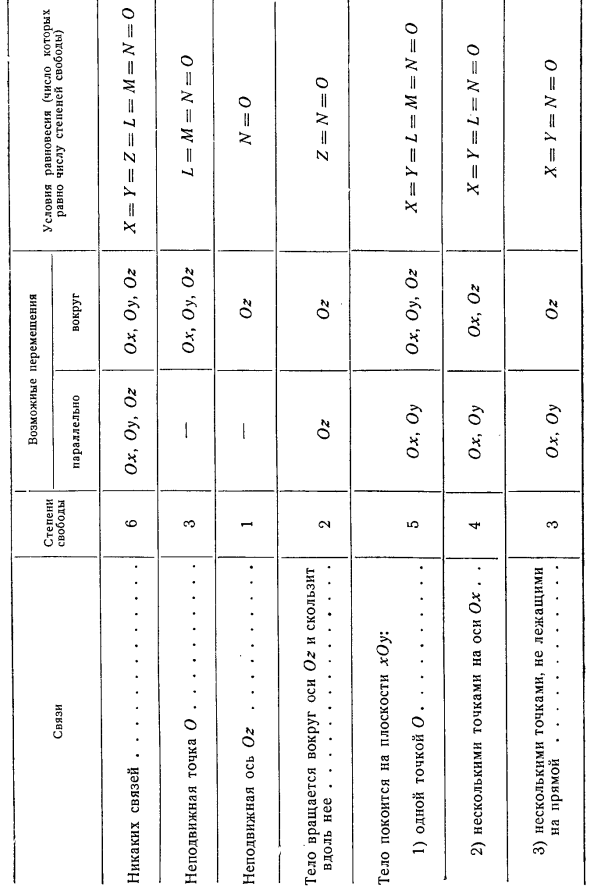
Применение к равновесному состоянию твердых тел. 240 страничная таблица показывает проекцию главного вектора по X, Y, Z, L, M и N на координатные оси и главный момент на начало силы, приложенной непосредственно к solid. It также указывается количество степеней свободы твердого тела, которое будет подвергнуто различным рассматриваемым соединениям.
Смотрите также:
Решение задач по теоретической механике
| Множители Лагранжа | Связи, определяемые равенствами; допускаемые перемещения, характеризуемые неравенствами |
| Приложение принципа возможных скоростей к равновесию нитей | Аналитические выражения |
