
Оглавление:


Общее уравнение динамики для системы со связями без трения
- Масса пр м2. Предположим, что у нас есть система из n точек mn Координаты xt, yv zv x2, y2, r2 подчинены заданному соединению и выполняются без трения. Однако, эти отношения могут зависеть от времени. Данная сила действует на точку и показывает проекцию данной силы результата, приложенной к точке m X Y Z. Согласно принципу Д Аламбера, в каждый момент времени существует равновесие между заданной силой Fv, силой инерции и реакцией сцепления. Таким образом, когда система уведомляется о любом возможном движении, сумма работы данной силы, силы инерции и реакции сцепления сводится к нулю.
Но если допустимо возможное смещение связей, возникающих в момент t, то сумма реакций связей будет равна нулю п. 162. в результате сумма силы инерции и работы данной силы будет равна нулю. В компонентах возможного движения точек показано Во времени т. С момента проекции Сцепление с инерционной силой а, точки равны ту. м д з. Т. милливольт Тогда есть уравнение В р + у ДТ Р1 ах Это делается для всех возможных перемещений, допускаемых соединением, существующим во времени t. это уравнение является общим уравнением для динамики системы бесфрикционной связи. Вы можете написать В Возможное смещение точки радиус вектора, gA1v масса МВ. Уравнение 1 является общим статическим уравнением п.
Рассмотрим систему, образованную Землей, предполагаемой неподвижной, н математический маятником массы т. Людмила Фирмаль
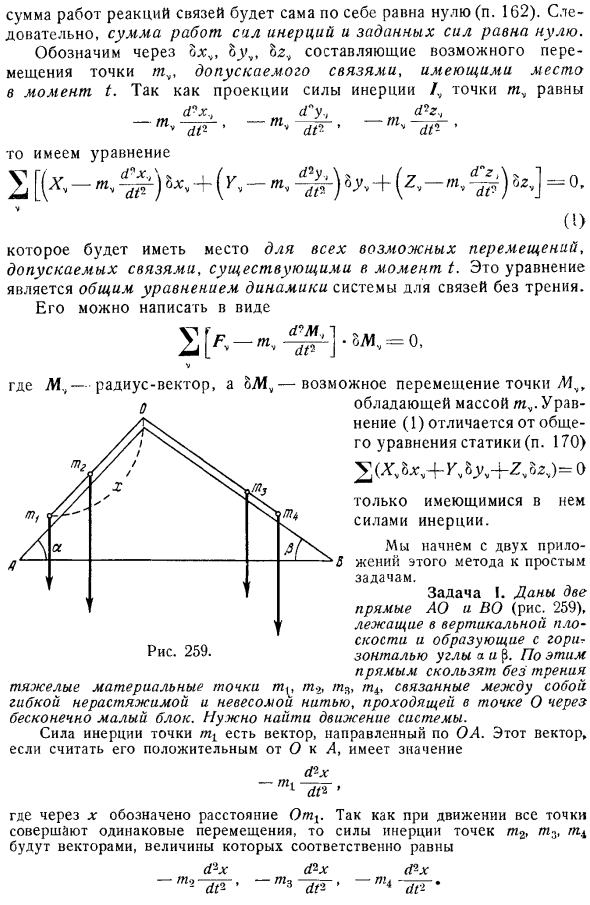
170, отличающимся только силой инерции, существующей в нем. Для легкой задачи начните с соседних 2 х жен этого метода. Задача I. 2 приведены прямые линии AO и VO рис. 259.Прокладка углов а и Р. Поскользнуться на этих линиях без трения Тяжелые материальные пункты m, m, m, m, и m4.It соединяется между собой гибкой и нерастягивающейся невесомой нитью, проходящей через бесконечно малые блоки в точке O. It необходимо выяснить движение системы. Инерционная сила точки mt это вектор вдоль ОА.
- Этот вектор имеет значение, если вы считаете его положительным от O до A. ПХ Где X обозначает расстояние ОМВ. Силы инерции точек m2,mz и m являются векторами с одинаковыми значениями, поскольку все точки совершают одинаковое движение во время движения. Д х РХ t tz 2 4 LG из них первое направление направлено вдоль O A, остальные 2 направлены вдоль BO. In в этом случае направление от B до O считается положительным направлением BO, поэтому направление BOA является положительным с обеих сторон.
Система должна описывать эти инерционные силы и их равновесие под действием Весов m , m2g, m3g и m4g точек mt2, m3 и m4.Единственное возможное движение, которое возможно, это действительное движение, то есть движение BX системы. Возможная работа силы инерции для этого перемещения однозначно равна Что касается работы гравитации ВХ грех 4 m2g ВХ грех m3g ВХ грех Б м4g ВХ грех Написав, что сумма этих задач равна нулю, получим уравнение движения д 2х МХ + М2 + М3 М4 = МХ + м2 г грех м3 м М4 г грех Из этого мы видим, что существуют константы. И так оно и есть.
Если после этого система будет предоставлена самой себе, то будет постоянно удовлетворяться равенство о. Людмила Фирмаль
За исключением количества, значения равномерно ускоряются Я м2 г синоу М34 т4 г грех Равный нулю. Это состояние equilibrium. In в этом случае движения будут равномерными. Если 1 из точек проходит через 0, необходимо изменить уравнение. Задача II. равномерное движение тяжелой цепи вдоль неподвижной curve. In статически пункт 169, пример 7 мы находим, что условие равновесия цепи равно нулю суммы тангенциальных составляющих всех сил. Если сумма касательных составляющих силы инерции и силы тяжести равна нулю, то получим уравнение движения. Пусть Oz восходящая вертикаль, а 2 = p s отношение ординаты и дуги.
Косинус угла между положительным направлением касательной и вертикальной линией равен f .Эту задачу С. 344 и получим касательную составляющую веса элемента и значение X. Р = Р5 а + Х в. Когда вы добавляете эти компоненты, вы получаете: + Зет S P f +x +0 s 01 г т д ы Касательная составляющая ускорения равна 2, поэтому касательная равна г S и S 5 я составляющая ол инерции того же элемента. Is t сумма этих составляющих равна dh. разность потенциалов. Написав, что сумма всех составляющих mg t равна нулю, мы снова находим ранее составленное уравнение. dh.
Смотрите также:
Теоретическая механика — задачи с решением и примерами
| Принцип Даламбера. Общее уравнение динамики. Формулировка принципа | Приведение уравнений движения к наименьшему числу |
| Случай системы со связями | Голономные системы; координаты голономной системы |
Если вам потребуется заказать теоретическую механику вы всегда можете написать мне в whatsapp.
