
Оглавление:


Метод множителей Лагранжа для голономной системы
- Приведите голономную систему, подчиненную связи, которая выражена в уравнении 6 предыдущего абзаца. Определить возможные смещения, допускаемые наложенными в данный момент ограничениями дать фиксированное численное значение во времени t и такие изменения GVp ……. функции bxn, bn, bzn p 2. Ты должен сказать ФХ. То есть, чтобы суммарная вариация функции fv f2 была равна нулю, получаем следующее уравнение: этому должны удовлетворять все Бывы по возможному движению системы. ЦТС У. Следует отметить, что если связь зависит от времени, то фактическое движение системы не является движением, которое может быть рассмотрено здесь.
В самом деле, рассмотрим систему, на которую действуют внутренние силы, зависящие только от положения точек системы. Ее полная энергия может быть изменена только внешними действиями. Людмила Фирмаль
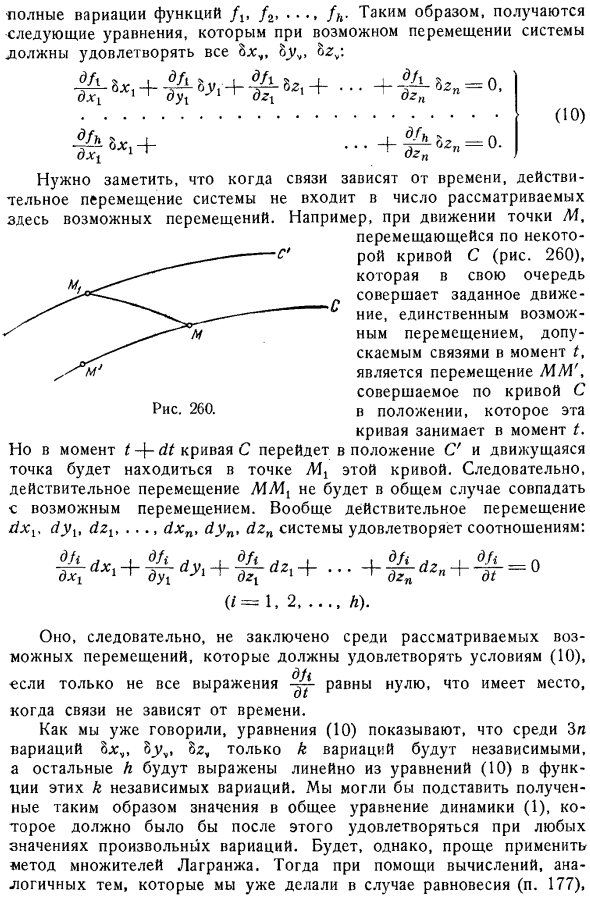
Например, если точка м движется по некоторой кривой с рис. 260 и это, в свою очередь, выполняет заданное движение, единственно возможное движение разрешено вступить в момент времени t движение происходит вдоль кривой C в этом положении мм кривой занимает в момент времени t. Однако с момента t + dt кривая C перемещается в положение C , и точка движения становится точкой этой кривой. Таким образом, фактическое движение МЛ11, как правило, не совпадает с возможным движением. В общем, фактическое смещение системы Z хр dylt dzv …компания Dxn, Дин, дзн будет соответствовать следующему соотношению: Z = 1, 2.Ля.
- Следовательно, условия 10, dh, поскольку он не окружен возможными смещениями, которые могут быть рассмотрены. Только если все выражения не равны нулю, это делается, когда соединение не зависит от времени. Как уже упоминалось, выражение 10 показывает, что из 3 N вариаций ox, B yv, Bz независимыми являются только k вариаций, а остальные h представлены линейно из выражения функции 10 этих K независимых вариаций. Полученное таким образом значение можно подставить в уравнение общей динамики 1. оно должно быть заполнено относительно значения любой вариации. Однако проще применить метод множителя Лагранжа. Затем, в случае равновесия с.
Вы можете получить уравнение, используя вычисления, аналогичные уже выполненным. И В уравнении равновесия, если заменить величину Kv, Zv на величину В столкн d2x. Т. Второзаконие Таким образом, вы можете получить 3 уравнения для каждой точки в системе и использовать все уравнение 3n с уравнением h link для определения координат 3n и параметра h как функции времени K. механическая интерпретация параметра K будет такой же, как и для равновесия. Реакция объединения, которая накладывается на массу и выражается в Формуле ft = 0, имеет проекцию.
Эта энергия затем расходуется на преодоление пассивных сопротивлений. Система, на которую действуют внутренние силы, зависящие только от положения точек, обязательно консервативна. Людмила Фирмаль
Этот метод действительно полезен только в том случае, если количество точек в системе незначительно. В противном случае приведите решение задачи к интегралу уравнения как можно меньше, параметр qlt q2,…функция времени t, qk, должна выражать координату k3n.
Смотрите также:
Теоретическая механика — задачи с решением и примерами
| Приведение уравнений движения к наименьшему числу | Частный случай теоремы проекций количеств движения |
| Голономные системы; координаты голономной системы | Частный случай теоремы моментов |
Если вам потребуется заказать теоретическую механику вы всегда можете написать мне в whatsapp.
