
Оглавление:


Метод малого параметра
- Нелинейная материальная система называется автономной, когда ее движение четко описывается независимым от времени дифференциальным уравнением. Пример Х WX с ПФ X, я, 1 Где p-параметр как коэффициент нелинейной непрерывной дифференцируемой функции f x, Я. В дальнейшем периодическое решение уравнения 1 найдено в предположении параметра p. Is мала, а функция f зависит только от координаты x. Это определяется методом разложения степенных рядов по малому параметру p. A. Этот метод, описанный в работе Пуанкаре, называется A. A. и получил дальнейшее развитие в творчестве Андронова. А. А. Остроумова, Н. М. Крылова, Н. Н.
Боголюбова, Ю. А. Митропольский. Напишите желаемое периодическое решение в следующем формате х-ХL iLXl ntxi … 2 часа дня. Где x0, xi x-неизвестная периодическая функция частот, кратных циклическим частотам p и p, определяемая later. At одновременно разверните p — 2 нужной круговой частоты-с мощностью малого параметра p. п а АИП ПДП… 3 часа дня. Где ocj, a4-постоянный коэффициент, который определяется при интегрировании Формулы 1.
При вычислении момента инерции однородной плоской фигуры относительно некоторой оси выделяют в плоской фигуре такую элементарную площадь, момент инерции которой относительно соответствующей оси известен, либо легко может быть подсчитан. Людмила Фирмаль
Значения Oj, a выбираются таким образом, чтобы решение 2 было периодическим, то есть не содержало так называемых резонансных или долговременных членов, которые растут бесконечно с time. To для ясности предположим, что при решении задачи необходимо интегрировать дифференциальные уравнения. У1 п х м грех ст НТ грех 3 ПТ… Коэффициент Mt зависит от at. Среди конкретных решений этого уравнения есть бесконечно возрастающее резонансное решение-cos pt. To чтобы искомый закон движения был цикличным, необходимо учесть M равное нулю. Искомый коэффициент a определяется по формуле Mi 0. Решите задачу указанным методом и определите следующий закон свободных нелинейных колебаний.
Рекомендуется в следующем порядке 1 Создайте дифференциальное уравнение движения 1, представленное в виде—p f x 0. 2 используя формулы 2 и 3, в разложении мощности малого параметра p опишем искомый закон движения x и неизвестную мощность 2 круговой частоты p. 3 вычислить I и I, используя формулу 2 4 заменить значения x, I и I в абзаце. 2 и 3 подраздел 1 дифференциал equations. At в то же время замените коэффициент а с помощью Формулы 3.То есть, ki-pt-a1p, — a ii— …И еще write. As результатом этих подстановок является дифференциальное уравнение с членами, содержащими малый параметр p различной степени obtained. In кроме того, без членов p А. А. Андронов, А. А. Вит, О. Е.
Теория колебаний, физмати, 1959. Н. м. Крылов и Н. Н. Боголюбов, введение в нелинейную механику, Изд-во АН УССР, Киев, 1937. 5 в дифференциальном уравнении части 4 мы собираем член, который содержит меньший параметр той же степени, и член, который не содержит p. то есть выражение выражается в виде А у см. .- .- О. 6 малые коэффициенты параметров различных порядков, а также отсутствие членов p, то есть АО 0 11 0 22 0…равняясь нулю, мы получаем систему дифференциальных уравнений. Д х.- О. х0 Л Pax2 Р2 А1,а, ХД, хD 7 запишите начальные условия движения дифференциальных уравнений в п. 6. Итак, гипотетически, если 0, то x 0 a, b 0 0, то, исходя из выражений H и H, получим п.
Используя начальные условия 7, интегрируем дифференциальное уравнение X0 p9×0 0 и x0 0 9 ввести полученную формулу xe t в дифференциальное уравнение я Р Х Fi в ОИ. х0 После простой тригонометрии с правой стороны мы получаем следующую форму п Х2 l1x потому что ПТ потому что 3 ф… Чтобы не увеличиваться бесконтрольно со временем, его следует считать равным нулю. Определите C из уравнения 0. 10 используя начальные условия движения в пункте 7 интегрировать дифференциальное уравнение А Х1 Н COS на 3 ПТ… определите xj f.
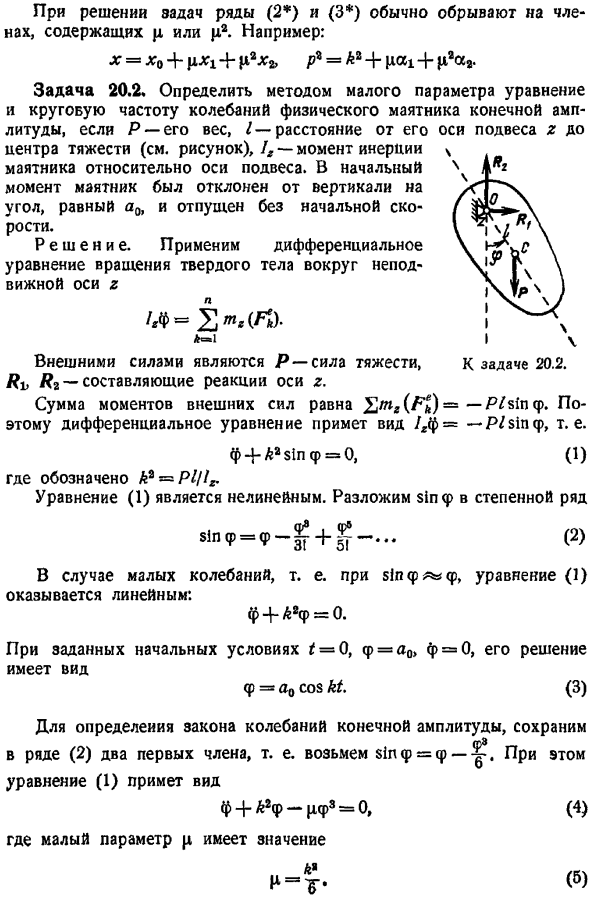
Значения x0 0, ots и x1 0-это пункт 8, 9 и 10 вставить в дифференциальное уравнение А Р2 1 ф я а ХV ХД. Повторите расчет, а также расчет абзаца. 9 и 10, А и Х2 0 и т. д 12 определите искомые значения x 0 и p9, пункт 2 и введите расчетные значения xv 0, aj Xj 0, a2, x2 0 и т. д При решении задачи строки 2 и 3 обычно усекаются терминами, включающими p или A. ниже приведен пример х х0 jxx1 p2×2, Р2 А2 СА1 п a9. Задача 20.2.Используя метод малых параметров, определите уравнение физического маятника конечной амплитуды и частоту круговых колебаний, если P — его вес. I-расстояние от оси подвески z до центра тяжести см. рисунок, а 1-момент инерции маятника относительно подвески axis.
В первый момент маятник отклонялся от вертикали на равный угол и отпускался без начальной скорости. Решение. Применить дифференциальное уравнение для вращения твердого тела вокруг неподвижной оси r Внешняя сила-P-гравитация, задача 20.2. Ри 7 А-это компонент реакции по оси Z. Сумма моментов внешней силы — будет равна PZsincp. So, вид дифференциального уравнения равен xp — PZsintp, то есть А грех Р 0, 1 Где это показано Формула 1 имеет вид nonlinear. To разверните sin g G g -.. 2 Если вариация мала, то есть sin pia p, то уравнение 1 становится линейным. д р 0. При заданных начальных условиях i 0, a0 и 0 решение имеет вид Ф. о. soaI.
- Чтобы определить закон колебаний конечной амплитуды, запишите первые 2 члена в ряд 2. То есть sin p q —в этом случае уравнение 1 примет вид A -RF 0, 4 где малый параметр p имеет значение Для определения закона колебаний маятника применяется метод малых параметров. он всесторонне выполняет точный расчет для термина, содержащего p в 1-м порядке. Таким образом, искомый угол склонения и неизвестная круговая частота p составляют 2 раза ф 0 Ф 0 МФ1 0. 6 ПГ ка парад 7 Где, 1 0 и константы подлежат последующим решениям. Используя 6 и 7, введем 0 1 и k pa-pa в уравнение 4.Ты найдешь его. ФО Ра-на1 Фо УХЛ1 -а Фо IF1 0.
До члена, содержащего малый параметр p первого порядка, уравнение принимает вид Fo 4-R Fo I F1 F1 1fo-FY 0. а также коэффициенты в скобках без p, если мы уравняем члены уравнения без p до нуля ФО Фо О, 8 Ф1 ргУ1 1фо Ф5 — 9 Учитывая начальные условия t 0, p aQ, 0, используя уравнение 0 Фо 0 нф1 0 О О Ф О нФ О пиши ФО 0 ЛF1. О Фо о ЛF1 о. В каждом из этих уравнений члены без p и с p слева и справа делаются равными начальным условиям функций 0 0 и 1. ФО 0 АО. Ф1 О. ФО О. Ф1 0 0.
Если в ходе решения задачи требуется вычислить момент инерции твердого тела относительно оси, не проходящей через центр тяжести, то проводят параллельную ось через центр тяжести твердого тела и применяют теорему Штейнера (при этом момент инерции твердого тела относительно оси, проходящей через центр тяжести, масса твердого тела и расстояние между параллельными осями должны быть известны). Людмила Фирмаль
Переходим к интегрированию дифференциальных уравнений 8.как известно, формат его общего решения имеет вид о 0 Cx cos pt С, sin pt А производная по времени-это 0 — С psin пт Хгп потому что ПТ. Если ввести в эти уравнения начальные условия 10 t Q, oa, 0, то получим Cx a0 Ca 0.И так оно и есть. Пхо 0 о cospt. И Это первое приближение, в котором круговая частота p еще не определена. Для закрепления дифференциального уравнения 9 введем результат 11 справа и формулу cos pf y cos pt используйте cos 3 pt. Возьми Ф1 П ти О Б 4 в Потому что ПТ -Т Адж, потому что 3 РФ.
Конкретное решение этого уравнения, соответствующее первому члену правой части, неограниченно возрастает частное решение x — — tsinp является дифференциальным уравнением J Помните, что это соответствует P8x bcosp .Поскольку закон искомого движения является периодическим, то коэффициент формулы 12 в cos pt должен быть равен нулю, то есть ax aj 0.
Где формула 12 имеет вид i p4i 4a8cos3P О4 Его общее решение fx равно сумме F1 f, 11 f, 1, 15 Где f — частное решение уравнения 14, а f 1 — общее решение соответствующего однородного уравнения F1 p ph1-0.In это дело Ф Ф 1 Ди cospt да грех, пт, ТП Альф соз 3 ПТ Ф И f — Если вы назначите 9apcos 3pt формуле 14, вы найдете a — atsthr1.Теперь общее решение 15 можно записать следующим образом Форекс ДХ, потому что ПТ да грех пт-потому что 3 ПТ 16 Функция 16 и ее производная по времени —DJ slnjrf d2pcos RF — sin3pf Начальные условия движения 10 7 0, 0 0, 1 0 0, поиск.
Введите эти значения Dx и D в Формулу 16 Pi C spf-cos3pf — О Чтобы определить искомый закон вибрации p и крутую частоту маятника p, воспользуемся результатами 11, 13 и 17. В Формуле Б и 7 р a0cos РФ п. — Кос РФ-cos3 ТФ пр — к вторичный марки. Используйте значение малого параметра p 5, чтобы, наконец, найти 2-е приближение. 18 19 Где a0-начальный угол отклонения маятника от вертикали, 6 PI I,.Из Формулы 19 следует, что p k l — — a Г 2.Узнайте больше. до тех пор, пока член, включающий a, 1—g-aoj 1-pj-a , не найдет круговую частоту P, представляющую интерес.
Как видно из Формулы 20, маятник колеблется по закону 20 на частоте кривизны Р 18, которая зависит от начального отклонения маятника А0.Поэтому вибрации нет isochronous. In другие слова Условия эксплуатации. Напомним, что приближенное линейное дифференциальное уравнение A p 0 соответствовало изохронным гармоническим колебаниям 3 p a0cos6f. поэтому даже приближенное решение нелинейных уравнений, выполненных в этой задаче, смогло обнаружить отсутствие изохронности колебаний. Влияние начального углового отклонения маятника a0 на круговую частоту p равно small.
Если из Формулы 20 ab 30 0,52 рад, то р 0,9836. В заключение воспользуемся 18 результатами формулы 20 и применим приближенное уравнение — — — — — найти 1 Tb Dem, искомый закон вибрации маятника в форме — Ля. , 21 Если проигнорировать член, содержащий aj в уравнении 21, то приближенный результат, соответствующий линейному дифференциальному уравнению 6а p 0 3 p av cos kt.
Смотрите также:
Предмет теоретическая механика
