

Контрольная работа КЗ.
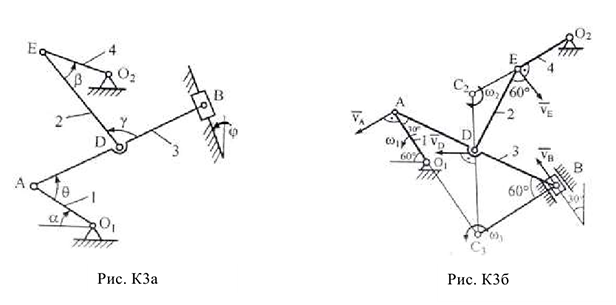
Механизм (рис. КЗа) состоит из стержней 1, 2, 3, 4 и ползуна  , соединенных друг с другом и с неподвижными опорами
, соединенных друг с другом и с неподвижными опорами  и
и  шарнирами.
шарнирами.
Дано:


(направления  и
и  против хода часовой стрелки).
против хода часовой стрелки).
Определить:

Решение
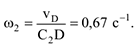
1 Строим положение механизма в соответствии с заданными углами (рис. КЗб, на этом рисунке изображаем все векторы скоростей).
2 Определяем  . Точка принадлежит стержню
. Точка принадлежит стержню  . Чтобы найти , надо знать скорость какой-нибудь другой точки этого стержня и направление
. Чтобы найти , надо знать скорость какой-нибудь другой точки этого стержня и направление  . По данным задачи, учитывая направление
. По данным задачи, учитывая направление  можем определить
можем определить  ; численно
; численно

Направление найдем, учтя, что точка принадлежит одновременно ползуну, движущемуся вдоль направляющих поступательно. Теперь, зная направление , воспользуемся теоремой о проекциях скоростей двух точек тела (стержня ) па прямую, соединяющую эти точки (прямая ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим

3 Определяем  Точка
Точка  принадлежит стержню
принадлежит стержню  . Следовательно, по аналогии с предыдущим, чтобы определить надо сначала найти скорость точки
. Следовательно, по аналогии с предыдущим, чтобы определить надо сначала найти скорость точки  , принадлежащей одновременно стержню . Для этого, зная и , строим мгновенный центр скоростей (МЦС) стержня ; это точка
, принадлежащей одновременно стержню . Для этого, зная и , строим мгновенный центр скоростей (МЦС) стержня ; это точка  , лежащая на пересечении перпендикуляров к и , восставленных из точек
, лежащая на пересечении перпендикуляров к и , восставленных из точек  и (к перпендикулярен стержень 1). По направлению вектора определяем направление поворота стержня вокруг МЦС . Вектор
и (к перпендикулярен стержень 1). По направлению вектора определяем направление поворота стержня вокруг МЦС . Вектор  перпендикулярен отрезку
перпендикулярен отрезку  , соединяющему точки и , и направлен в сторону поворота. Величину
, соединяющему точки и , и направлен в сторону поворота. Величину  найдем из пропорции
найдем из пропорции

Чтобы вычислить и  , заметим, что
, заметим, что  — прямоугольный, так как острые углы в нем равны 30° и 60°, и что
— прямоугольный, так как острые углы в нем равны 30° и 60°, и что  . Тогда
. Тогда  является равносторонним и
является равносторонним и  . В результате равенство (3) даст
. В результате равенство (3) даст

Так как точка  принадлежит одновременно стержню
принадлежит одновременно стержню  , вращающемуся вокруг , то
, вращающемуся вокруг , то  . Тогда, восставляя из точек и D перпендикуляры к скоростям и , построим МЦС
. Тогда, восставляя из точек и D перпендикуляры к скоростям и , построим МЦС  стержня . По направлению вектора определяем направление поворота стержня вокруг центра . Вектор направлен в сторону поворота этого стержня. Из рис. КЗб видно, что
стержня . По направлению вектора определяем направление поворота стержня вокруг центра . Вектор направлен в сторону поворота этого стержня. Из рис. КЗб видно, что  , откуда
, откуда  . Составив теперь пропорцию, найдем, что
. Составив теперь пропорцию, найдем, что

4 Определяем  . Так как МЦС стержня 2 известен (точка ) и
. Так как МЦС стержня 2 известен (точка ) и

то
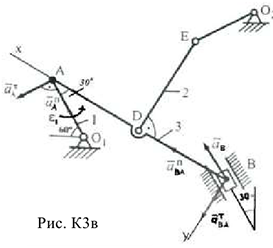
5 Определяем  (рис. КЗв, на котором изображаем все векторы ускорений). Точка
(рис. КЗв, на котором изображаем все векторы ускорений). Точка  принадлежит стержню . Чтобы найти , надо знать ускорение какой-нибудь другой точки стержня и траекторию точки . По данным задачи можем определить
принадлежит стержню . Чтобы найти , надо знать ускорение какой-нибудь другой точки стержня и траекторию точки . По данным задачи можем определить  , где численно
, где численно
Вектор  направлен вдоль
направлен вдоль  , а
, а  — перпендикулярно : изображаем эти векторы на чертеже (см. рис. КЗв). Так как точка одновременно принадлежит ползуну, то вектор параллелен направляющим ползуна. Изображаем вектор на чертеже, полагая, что он направлен в ту же сторону, что и . Для определения воспользуемся равенством
— перпендикулярно : изображаем эти векторы на чертеже (см. рис. КЗв). Так как точка одновременно принадлежит ползуну, то вектор параллелен направляющим ползуна. Изображаем вектор на чертеже, полагая, что он направлен в ту же сторону, что и . Для определения воспользуемся равенством

Изображаем на чертеже векторы  (вдоль
(вдоль  от
от  к
к  ) и
) и  (в любую сторону перпендикулярно ); численно
(в любую сторону перпендикулярно ); численно  . Найдя
. Найдя  з с помощью построенного МЦС
з с помощью построенного МЦС  стержня 3, получим
стержня 3, получим

Таким образом, у величин, входящих в равенство (8), неизвестны только числовые значения  и
и  ; их можно найти, спроектировав обе части равенства (8) на какие-нибудь две оси.
; их можно найти, спроектировав обе части равенства (8) на какие-нибудь две оси.
Чтобы определить  , спроектируем обе части равенства (8) на направление (ось
, спроектируем обе части равенства (8) на направление (ось  ), перпендикулярное неизвестному вектору . Тогда получим
), перпендикулярное неизвестному вектору . Тогда получим

Подставив в равенство (10) числовые значения всех величин из (7) и (9), найдем, что
Так как получилось  , то, следовательно, вектор
, то, следовательно, вектор  направлен как показано на рис. КЗв. 6 Определяем
направлен как показано на рис. КЗв. 6 Определяем  . Чтобы найти , сначала определим
. Чтобы найти , сначала определим  . Для этого обе части равенства (8) спроектируем на направление, перпендикулярное
. Для этого обе части равенства (8) спроектируем на направление, перпендикулярное  (ось
(ось  ). Тогда получим
). Тогда получим

Подставив в равенство (12) числовые значения всех величии из (11) и (7), найдем, что

Знак указывает, что направление противоположно показанному на рис. КЗв. Теперь из равенства

получим
Ответ:

Примечание. Если точка  , ускорение которой определяется, движется не прямолинейно (например, как на рис. КЗ.О — К3.4, где движется по окружности радиуса
, ускорение которой определяется, движется не прямолинейно (например, как на рис. КЗ.О — К3.4, где движется по окружности радиуса  ), то направление
), то направление  заранее неизвестно. В этом случае также следует представить двумя составляющими
заранее неизвестно. В этом случае также следует представить двумя составляющими  и исходное уравнение (8) примет вид
и исходное уравнение (8) примет вид

При этом вектор  (см., например, рис. КЗ.О) будет направлен вдоль
(см., например, рис. КЗ.О) будет направлен вдоль  , а вектор
, а вектор  перпендикулярно в любую сторону. Числовые значения
перпендикулярно в любую сторону. Числовые значения  и
и  определяются так же, как в рассмотренном примере (в частности, по условиям задачи может быть
определяются так же, как в рассмотренном примере (в частности, по условиям задачи может быть  или
или  , если точка движется прямолинейно).
, если точка движется прямолинейно).
Значение  также вычисляется по формуле
также вычисляется по формуле

где  — радиус окружности
— радиус окружности  , a
, a  определяется так же, как скорость любой другой точки механизма.
определяется так же, как скорость любой другой точки механизма.
После этого в равенстве (13) остаются неизвестными только значения  и
и  и они, как и в рассмотренном примере, находятся проектированием обеих частей равенства (13) на две оси.
и они, как и в рассмотренном примере, находятся проектированием обеих частей равенства (13) на две оси.
Найдя , можем вычислить искомое ускорение
Величина служит для нахождения  (как в рассмотренном примере).
(как в рассмотренном примере).
